



1.电子控制电动式动力转向系统的工作流程
如图4-11所示,转向盘转矩信号和车速信号经过输入接口送入电脑,随着车速的升高,电脑控制相应地降低助力电动机电流,以减少助力转矩。发动机转速信号也被送入电脑,当发动机处于怠速时,由于供电不足,助力电动机和离合器不工作。因此,EPS工作时,EPS ECU必须控制发动机处于高怠速工作状态。点火开关的通断(ON/OFF)信号经A/D转换接口送入电脑。当点火开关断开时,电动机和离合器不能进入工作。电脑输出控制指令经D/A转换接口送入电动机和离合器的驱动放大电路中,控制电动机的旋转转向和离合器的离合。电动机的电流经驱动放大回路、电流表(A)、A/D转换接口反馈给电脑,将电动机的实际电流与按电脑指令应给的电流相比较,调节电动机的实际电流,使两者接近一致。

图4-11 电子控制电动式动力转向系统的工作流程
电动机和离合器接受电子控制器输出的控制电流,产生助力转矩,经传动齿轮减速后,再经过小齿轮实现动力转向,电动机的动力是通过行星齿轮机构传递的。离合器是由电磁铁和弹簧等组成的电磁离合器。
当点火开关接通时,电源加在EPS电子控制器上,电动助力转向系统才能进行工作。在发动机已被起动时,交流发电机的L端子的电压加到电子控制器上。当检测到发动机处于起动状态时,动力转向系统转为工作状态。
行车时,电子控制器按不同车速下的转向盘转矩控制电动机的电流,并完成电子控制转向和普通转向控制之间的转换。当车速高于30km/h时,则转换成普通的转向控制,电子控制器没有离合器信号和电动机电流输出,离合器处于分离状态。当车速低于27km/h时,EPS电子控制器又输出离合器信号和电动机电流,普通转向控制又转换为动力转向的工作方式。EPS电子控制器还具有自我修正的控制功能。当电动助力转向系统出现故障时,可自动断开电动机的输出电流,恢复到通常的转向功能;同时速度表内的EPS警告灯点亮,以通知驾驶人,动力转向系统发生故障。
2.电子控制液力式动力转向系统的工作流程
如图4-12所示,电控液压助力转向系统中的电动液压泵工作,通过转向控制单元根据车辆的行驶速度和转向角度等输入信号计算出理想的输出信号,然后通过电磁阀控制液压油为转向机提供适当的助力;当汽车低速行驶时,转向控制单元控制电动机输出较大的功率,使驾驶人可以轻松地转动转向盘;当汽车高速行驶时,转向控制单元控制电动机输出较小的功率,这样驾驶人在操纵转向盘时就比较稳定,也就实现了车速感应式转向。
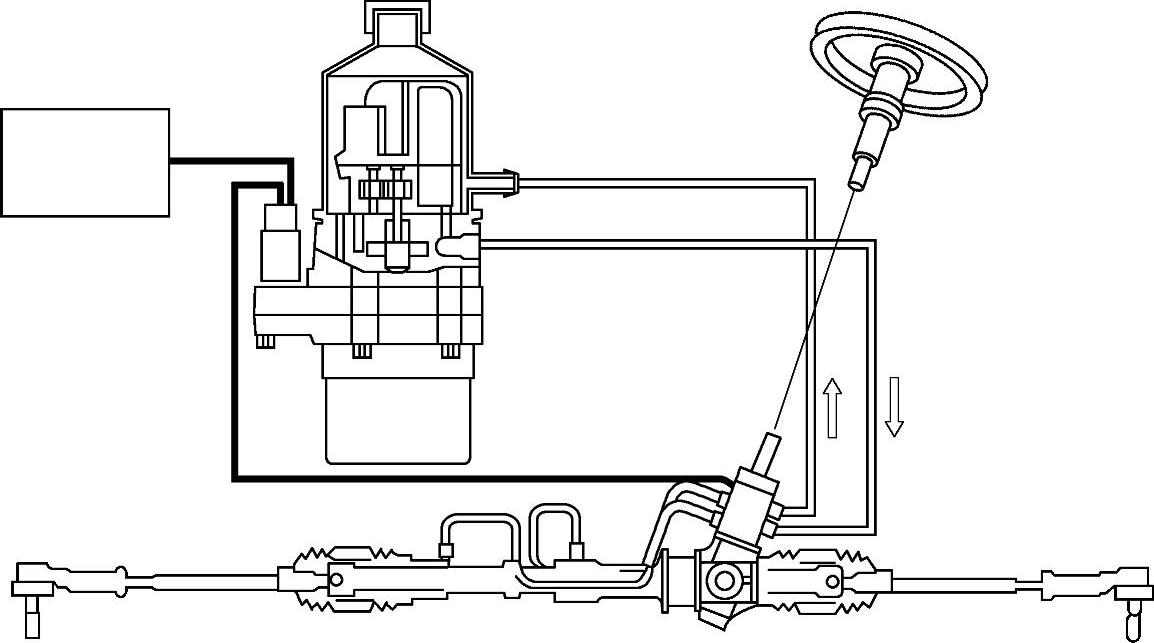
图4-12 电子控制液力式动力转向系统的工作流程
电子控制单元(ECU)根据车速传感器信号判断出车辆停止、低速状态与中高速状态,从而控制电磁阀通电电流。
(1)停车与低速状态 电子控制单元(ECU)使电磁阀通电电流大,经分流阀分流的油液通过电磁阀流回油箱,柱塞受到的背压小(油压低),柱塞推动控制阀阀杆的力矩小,因此,只需要较小的转向力就可使扭杆扭转变形,使阀体与阀杆发生相对转动而使控制阀打开,油泵输出油压作用到动力缸右室(或左室),使动力缸活塞左移(或右移),产生转向助力。
(2)中高速直行状态 车辆直行时,转向偏摆角小,扭杆相对转矩小,控制阀油孔开度减小,控制阀侧油压升高。由于分流阀的作用,使电磁阀侧油量增加。同时,随着车速的升高,通电电流减小,通过电磁阀流回油箱的阻尼增大,油压反作用力室的反力增大,使柱塞推动控制阀阀杆的力矩增大,转向盘手感增强。
(3)中高速转向状态 从存在油压反作用力的中高速直行状态转向时,扭杆的扭转角更加减小,控制阀开度更加减小,控制阀侧油压进一步升高。随着该油压升高,将从固定阻尼孔向油压反作用力室供给油液。这样,除从分流阀向油压反作用力室供给的一定流量油液外,又增加了从固定阻尼孔侧供给的油液,导致柱塞推力进一步增强。此时需要较大的转向力才能使阀体与阀杆之间作相对转动而实现转向助力作用,使得在中高速时驾驶人可获得良好的转向手感和转向特性。
3.电子控制电动式四轮转向系统的工作流程
电控电动式四轮转向系统主要由后轮转向执行器、输入传感器和电控单元组成,如图4-13所示。发动机工作时,四轮转向控制单元不断地从所有输入传感器处收到信号。如果转向盘转动,四轮转向控制单元就会对车辆速度传感器、主前轮转角传感器、副前轮转角传感器、主后轮转角传感器、副后轮转角传感器以及后轮转速传感器传来的信号进行分析,并计算出适当的后轮转向角,然后将蓄电池电压输入到后轮转向执行电动机使后轮转向。
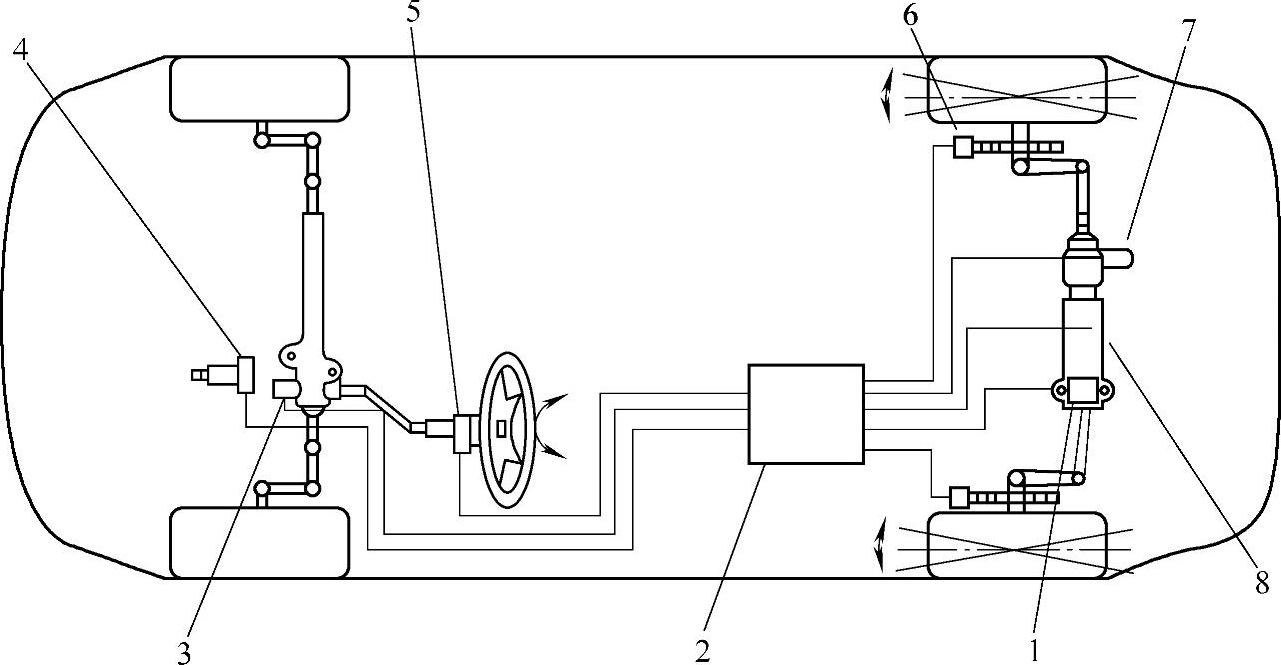
图4-13 电控电动式四轮转向系统
1—主后轮转角传感器 2—四轮转向控制单元 3—副前轮转角传感器 4—车速传感器 5—主前轮转角传感器 6—后轮转速传感器 7—副后轮转角传感器 8—后轮转向执行器(https://www.xing528.com)
蓄电池电压通过两只大功率晶体管输送到后轮转向执行器电动机处。其中一只晶体管在右转弯时导通,而另一只在左转弯时导通。主、副后轮转角传感器将反馈信号送到四轮转向驱动控制单元以指示后轮转角已被执行。
4.电子控制液力式四轮转向系统的工作流程
电控液力式四轮转向系统主要由转向盘、转向油泵、前动力转向器、后轮转向传动轴、车速传感器、电子控制单元和后轮转向系统组成,如图4-14所示。
电子控制系统由四轮转向控制器、转角比传感器和电控油阀组成,各部件的作用及工作流程如下:
1)四轮转向控制器。四轮转向控制器的作用有下列三点:①根据车速传感器送来的电脉冲信号计算汽车的车速,再根据车速的高低计算汽车转向时前后轮的转角比。②比较前后轮理论转角比与当时的前后轮实际转角比,并向步进电动机发出正转或反转及转角大小的运转指令。另外还起监视控制四轮转向电子线路工作是否正常的作用。③发现四轮转向机构工作出现异常时,起动警告信号灯,并断开电控油阀的电源,使四轮转向处于两轮转向状态。

图4-14 电控液力式四轮转向系统
1—转向盘 2—后轮转向系统 3—后轮转向传动轴 4—电子控制单元 5—车速传感器 6—前动力转向器 7—转向油泵
2)转角比传感器。其作用是检测相位控制器中的扇形控制齿板的转角位置,并将检测出的信号反馈给四轮控制器,作为监督和控制信号使用。
3)电控油阀。电控油阀的作用是控制由转向油泵输向后轮转向动力缸的油路通断。当液压回路或电子控制线路出现故障时,电控油阀就切断由转向油泵通向液压控制阀的油液通道,使四轮转向装置处于一般两轮转向工作状态,起到失效保护的作用。
后轮转向的工作流程:
1)当车速低于35km/h时,如图4-15a所示,扇形控制齿板在步进电动机的控制下向负方向偏转。假设转向盘向右转动,则小锥齿轮、大锥齿轮分别向空白箭头方向转动,摆臂在扇形齿板和大齿轮的带动下最终向右上方摆动,液压控制阀输入杆和滑阀也向右移动,由转向油泵输送的高压油液进入后轮转向动力缸的左腔,使后轮向左偏转,即后轮相对于前轮反向偏转。使车辆转向半径减小,从而提高了低速时的机动性。液压控制阀移动的行程大小与扇形齿板的转角大小成正比。
2)当车速高于35km/h时,如图4-15b所示,扇形控制齿板在步进电动机的控制下向图中正方向移动。假设这时转向盘仍向右转动,摆臂向左上方摆动,将液压控制阀输入杆和滑阀向左拉动,由转向油泵输送的高压油液进入后轮转向动力缸的右腔,结果使后轮向右偏转,即后轮相对于前轮同向偏转,因而使汽车高速行驶时的操纵稳定性显著提高。
3)当车速等于35km/h时,如图4-15c所示,扇形控制齿板处于中间位置,摇臂处于与大锥齿轮轴线垂直的位置。不管转向盘向左还是向右转动,液压控制阀输入杆均不产生轴向位移,后轮保持与汽车纵向轴线平行的直线行驶状态。
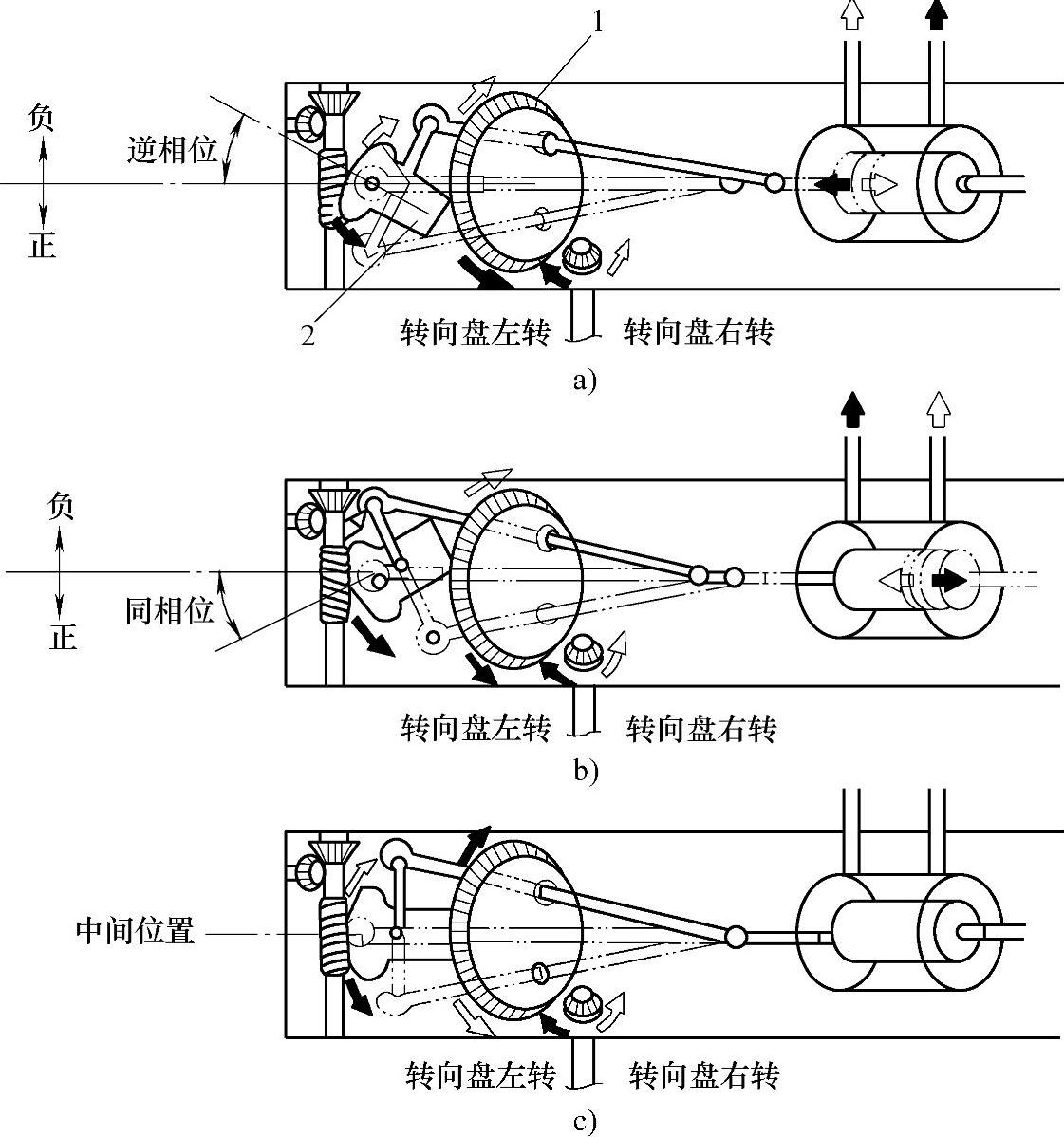
图 4-15
a)逆相位 b)同相位 c)中间位置
1—大锥齿轮 2—扇形控制齿轮
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。