



防滑控制单元(WSP)是BCE中的一部分。
列车每根车轴的一侧轴箱内都装有一个速度传感器,列车制动时,速度传感器将检测到的速度信号送入BCE。BCE中的WSP接受到速度信号后进行以下两项计算和比较:
1)一根车轴的减速度是否超过了先前设定的参数。
2)所有车轴相对速度水平与预设值比较。
一旦WSP监测到某根车轴减速度过快或是某根车轴转速与最大转速的车轴转速之差超出某个值,即判断该轴滑行,应进行防滑控制。在进行防滑控制时,防滑控制单元通过减小该车轴的制动缸压力来控制车轮滑行的深度。WSP通过对制动压力的修正能自动将车轮转速调整到最佳水平,以便最大限度地利用黏着系数。
实际上,列车的微机牵引控制(PCE)和BCE各有一套车轮滑行监测和防护系统。当实施电制动时,PCE会通过减小电制动力来防止车轮滑行,同时向BCE提供一个EDB低电位信号,防止BCE用增加空气制动力来补偿。但如果滑行信号持续时间超过2s,将取消电制动,只采用空气制动。
在空气制动时,防滑控制是通过BCE对安装在转向架上的双防滑阀的通气和排气的控制来实现的。双防滑阀实际上是两个完全对称的单防滑阀的组合,因此每个转向架只要配置一个,就能控制两个轮对。双防滑阀的结构如图17-8所示。
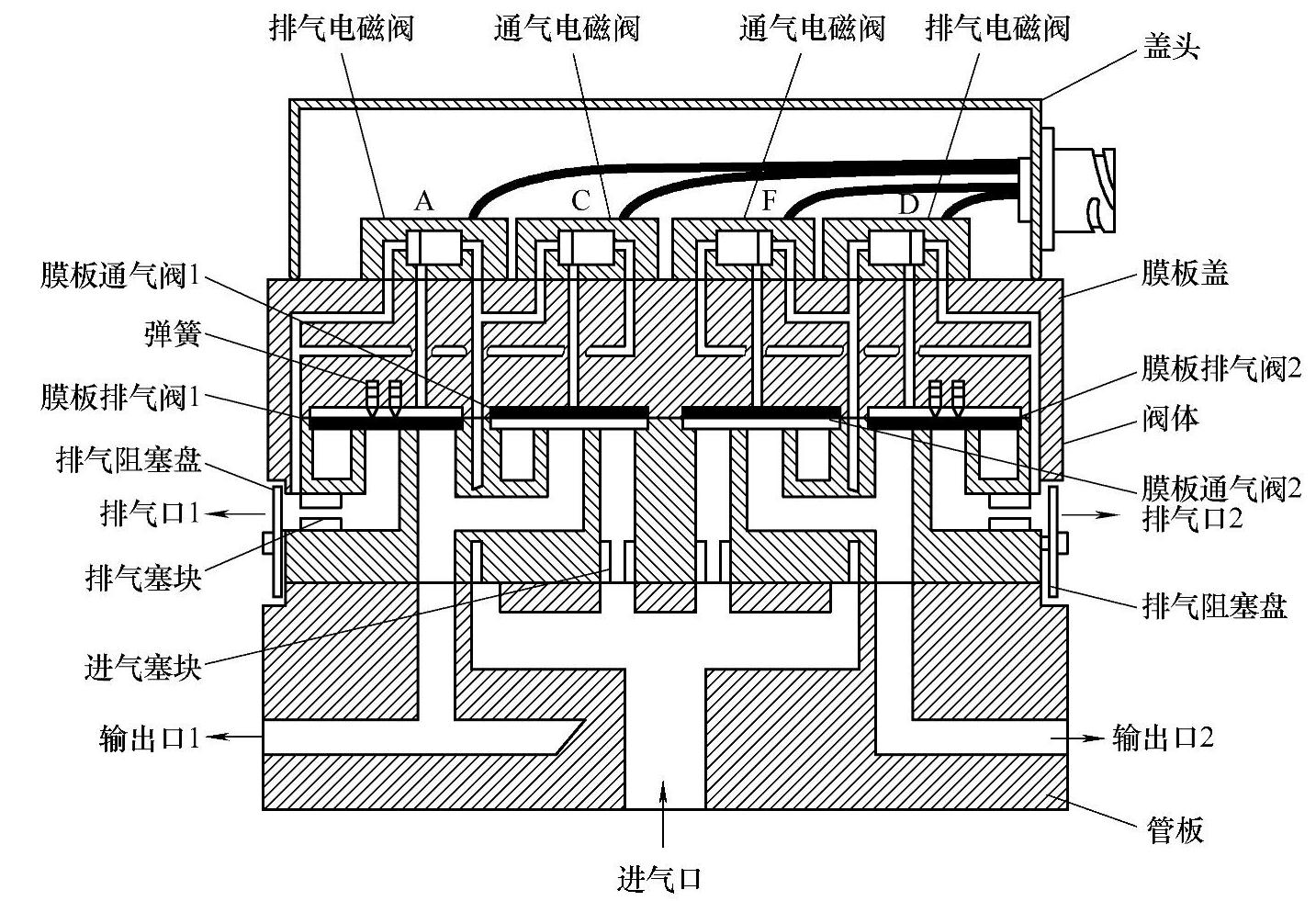
图17-8 双防滑阀的结构
单防滑阀上部有两个电磁阀:一个称为通气电磁阀;另一个称为排气电磁阀。通过对通气电磁阀和排气电磁阀的得电和失电组合,可以形成防滑阀的三种工况,即:通气、保压和排气。(https://www.xing528.com)
1.通气工况
排气电磁阀A失电(阀板向左),使压力空气穿过底部的进气口,再经过排气电磁阀作用到膜板排气阀1的顶部,加上弹簧的向下顶力,膜板排气阀1下压关闭排气口1和输出口1。同时,通气电磁阀C也失电(阀板向左),穿过底部进气口的压力空气不能进入通气电磁阀C。通气电磁阀C的另一端通排气口1,不能作用在膜板通气阀1上。进气口的压力空气顶开膜板通气阀1的底部,把阀芯抬离阀座,进气口和输出口1形成通路,从BCU来的压力空气通过防滑阀,被送到单元制动机的风缸内。
2.保压工况
排气电磁阀A失电(阀板向左),压力空气从进气口穿过,作用在膜板排气阀1顶部。在弹簧的顶压下,该压力关闭膜板排气阀1,并关闭排气口1和输出口1。同时,通气电磁阀C得电(阀板向右),穿过底部进气口的压力空气进入通气电磁阀C,作用到膜板通气阀1顶部,关闭膜板通气阀1,并关闭了进气口和排气口的通路,使防滑阀保持压力,也就是保证了单元制动机风缸的压力。
3.排气工况
通气电磁阀C得电(阀板向右),压力空气进入通气电磁阀C,作用到膜板通气阀1顶部,关闭膜板通气阀1,并关闭了进气口和排气口的通路。同时,排气电磁阀A得电(阀板向右),从膜板排气阀1顶部来的进气压力被切断。原先进入单元制动机风缸的压力反过来克服弹簧的向下顶力,顶开膜板排气阀1,使输出口的压力空气从排气口排出。膜板排气阀1顶部的压力也经排气电磁阀A送入大气。从进气口来的压力空气不能通过防滑阀,而原先进入单元制动机风缸的压力空气被排放到大气中去。
防滑阀在通常情况下处于不通电的状况,也就是通常处于通气状态。这时,从BCU主控阀来的压力空气全部经过防滑阀进入单元制动器风缸,产生预定的制动力。如果哪个轮对出现滑行,那么BCE会使相应的防滑阀的排气电磁阀动作,将单元制动机风缸中的部分空气排向大气,待滑行现象消除后再分阶段恢复制动力。防滑阀的动作反应速度由安装在进、排气口内的阻塞盘的大小决定。由于防滑阀串联在制动通路上,紧急制动期间防滑功能依然有效。当紧急制动缓解时,制动缸内的空气经EP控制板上的消声器排向大气。
为确保制动系统的安全性,每个转向架的双防滑阀输出量都受到控制,且每个速度信号都被监视。在正常情况下,动力制动引起的滑行由PCE控制;空气制动引起的滑行由BCU控制。在动力制动模式下,如果出现较大的滑行,制动控制单元将发送给PCE的WSP信号设为高电平。当PCE探测到这个输入信号正在变为高电平,制动力就迅速降为零。当制动力保持为零时,电制动一直是失效的。当WSP输入信号再次变为低电平时,制动力就会逐渐恢复。
在防滑控制时,制动力分两个阶段逐渐回升:第一个阶段,以接近冲击极限的速率回升,直到制动力已经达到设定值;第二个阶段,制动力再逐渐回升到滑行出现时的制动力值,到达这一点时,防滑控制就完成了。这个滑行修正的参数能达到优化系统控制的目的,并将反复出现滑行的可能性降到最小。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。