



电子防滑控制系统的发展从控制模式上划分已经大致经历了三代。
1.第一代防滑控制系统
国内外普遍采用的防滑控制系统是第一代“速度差、减速度(和滑移率)”控制式防滑控制系统。只要有一个检测参数超过设定值,就对制动缸进行大量排气,其控制状态基本如图16-9所示。该类控制方式的防滑控制系统存在很多缺点:
1)缓解迟缓造成滑移率不安定区的顶点B左移,不能有效防止车轮滑行。
2)由于使车轮安全脱离滑行状态所需的化解量较大,制动力难于沿轮轨黏着迅速恢复,从而产生黏着损失。
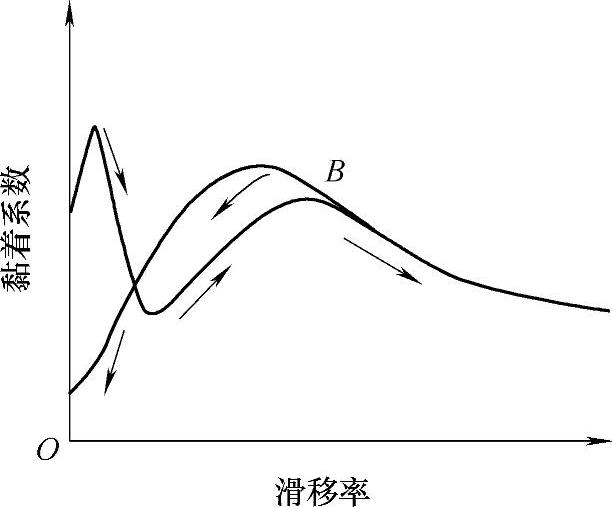
图16-9 第一代防滑系统控制状态
3)防滑器频繁动作可能会造成最终黏着时的制动缸压力不足,影响黏着利用。
4)黏着与滑行交替进行,降低了轮轨黏着系数(图16-9)。
第一代防滑控制系统运用情况:日本新干线电动车组防滑控制采用的是油压制动系统,其响应灵敏度高。因此,采用第一代防滑控制系统的控制模式,可有效防止车轮擦伤并减小黏着损失。
2.第二代防滑控制系统
在第一代防滑控制系统的基础上,法国和日本进行了第二代“滑移率”控制式防滑控制系统的开发。这种防滑控制系统采用轴速度差、减速度及减速度微分联合控制:即使检测到车轮滑行,制动缸也不大量排气,而是逐渐降低制动缸压力,使滑移率维持在一定范围内,以充分利用连续滑行的增黏效果,其控制状态基本如图16-10所示。它的优点是延长制动距离小,提高黏着利用。它的缺点是加速了轮轨磨耗(这是它最大的缺点),反复进行大的滑行控制会导致总风缸压力下降,而总风缸压力下降会引起非常制动。
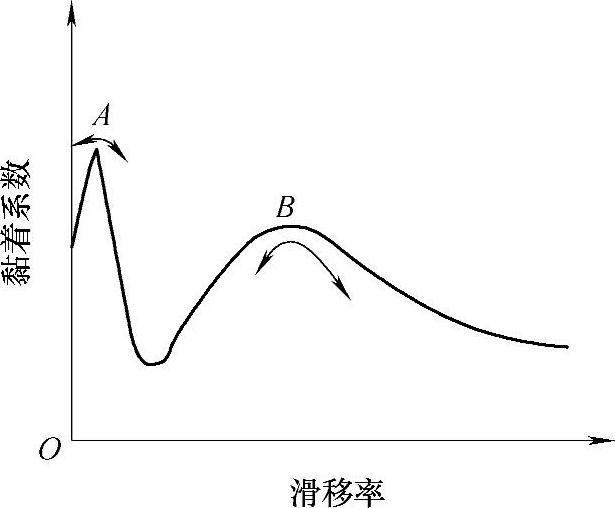
图16-10 第二代防滑系统控制状态
第二代防滑控制系统运用情况:法国将滑移率控制在10%~25%;日本证明滑移率控制在10%以内可基本维持最大黏着不变。(https://www.xing528.com)
3.第三代防滑控制系统
为解决“滑移率”控制法的轮轨磨耗问题,日本进行了第三代“蠕滑”控制式防滑控制系统的开发。该防滑控制系统也采用轴速度差、减速度及减速度微分联合控制,并在图16-10所示的蠕滑力饱和点A附近0.5%的微小蠕滑区内进行再黏着控制。它的优点是黏着利用率高,制动距离短,性能好。它的缺点是对系统运算速度和检测精度要求高。
第三代防滑控制系统运用情况:仅日本在研制此类防滑控制系统。
总结国内外的研究经验,在防滑控制模式上,按滑行趋势和再黏着趋势划分更细致的控制,其主要控制模式如下:
1)被广泛采用的减压、保压和压力恢复的三模式控制。
2)用于小滑行的三模式控制(小减压、小减压保压、小减压恢复)。
3)用于减少再滑行几率的压力恢复暂时保压模式。
4)防止黏着系数和采用铸铁闸瓦时产生大滑行的控制模式。
5)用于防止产生过大减速度和应力的控制模式。
小滑行和压力恢复暂时保压控制模式,是为了精密地保持黏着力和制动力处于均衡状态。
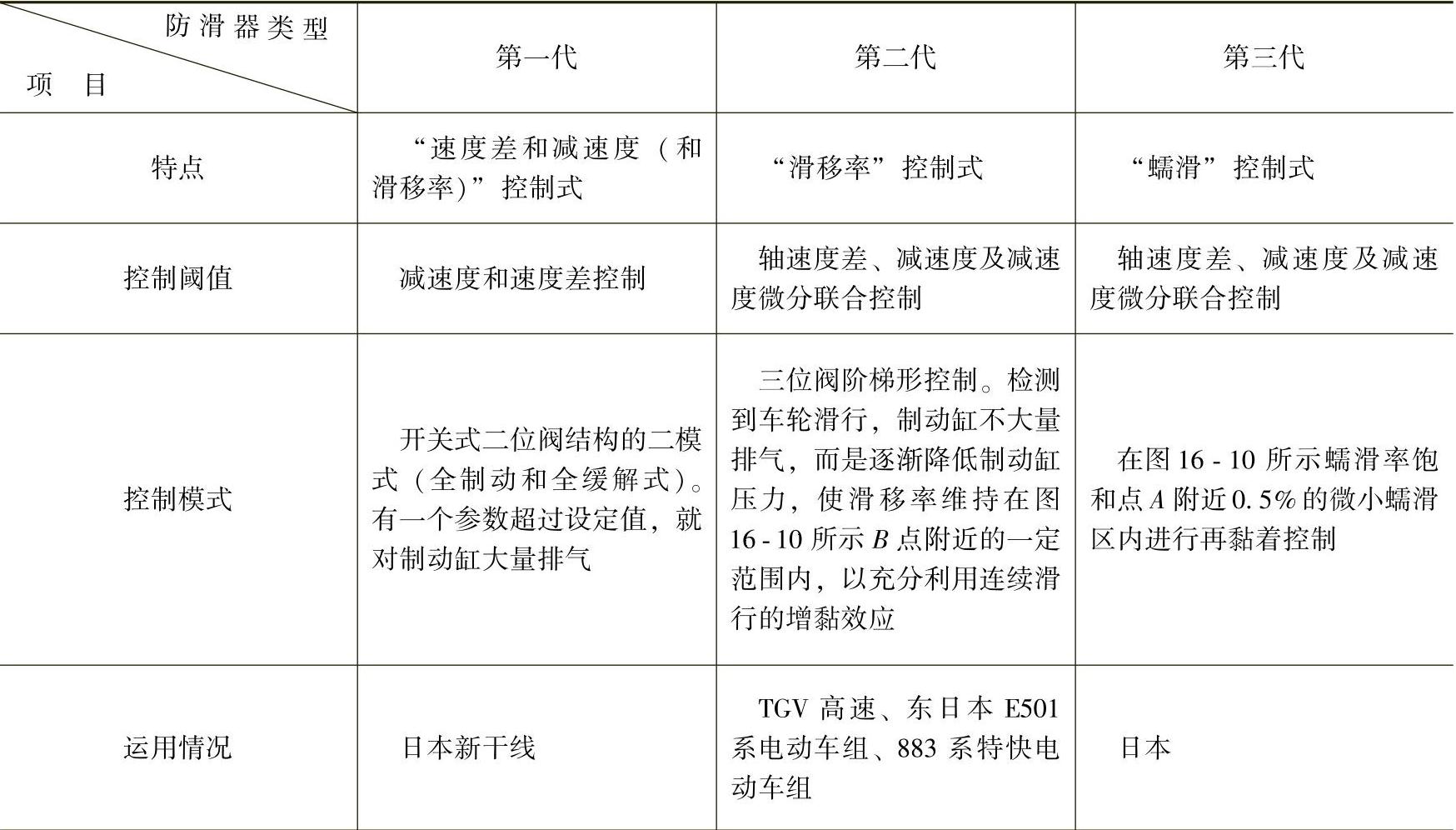
表16-1对各代防滑器的控制模式进行了比较。
表16-1 各代防滑器的控制模式比较
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。