



防滑控制是在制动力即将超过黏着力时,降低制动力,使车轮恢复处于滚动或滑、滚混合状态,避免车轮滑行。然而防滑控制的关键是:首先要正确判断什么时候为“滑行”。判断早了,会使制动力损失过大,无法充分利用轮轨间的黏着,使制动距离延长;判断晚了,就会产生滑行,造成踏面擦伤,起不到防滑作用。
目前,各种防滑控制系统在判断滑行时,使用了许多判据。这些判据主要有速度差、减速度、减速度微分和滑移率等。其中速度差和减速度使用最为普遍。但无论采用哪一种判据,都把防滑和充分利用黏着作为主要目的。有时,两种防滑系统采用相同的判据,但效果却不同,这主要是由于判据参数的选取以及对制动力的控制过程不同造成的。
1.速度差判据控制
速度差是某一根轴的速度与车辆速度的差值,防滑可针对速度差制定滑行检测标准。对于速度差标准,车轮磨耗的允许值就有6%~7%,再加上其他公差,因此速度差范围很大。如果速度差标准定得太高,会造成防滑控制系统误动作;但如果速度差标准定得太低,也会导致灵敏度降低(日本一般取速度差标准值为15km/h)。如果按高速范围制定速度差标准,到低速时就不能保证正常的防滑作用。因此,速度差标准就不能是一个固定值,而应当是速度的函数。也就是说,速度差是应随列车速度的减小而逐渐减小,确定速度差是否超限的阈值是随列车速度变化而变化的下坡函数,这就使系统变得复杂。
能否精确地测定轮对间的速度差是系统工作正确与否的关键。由于每个轮对直径不是绝对相同的,并且在运行中的磨耗也各不相同,所以各轮对间的速度差总是存在的,尽管此时并没有发生滑动。这就要求在检测轮对速度差时,必须考虑此轮径差异的因素,设置轮径矫正功能。我国运行的列车允许轮径差:同一节车为10mm,同一转向架为7mm。
速度差控制:当一节车的四个轮对(四根轴)中的一个轮对发生滑行时,该轮对的轴的速度必然低于其他没有滑行的轮对的车轴速度,将该轴速度与其他各轴速度进行比较并判定滑行轴的速度与参考速度之间的差值,当比较差值大于滑行判定标准时,该车轴的防滑装置动作,降低它所控制的该轴制动缸的压力,此时该轴的减速度逐渐减小;当比较差值达到某个预定值时,防滑装置使制动缸保压,让车轴速度逐渐恢复;当其速度差值小于滑行判定标准时,防滑装置使制动缸压力恢复。
实践表明,车轮在连续滑行时,宜采用速度差判据控制,它需要把各根车轴联系在一起。同时,由于它往往受速度范围的制约且对于车轮磨耗造成的轮对圆周尺寸的误差特别敏感,因此速度差标准的制定和设计是一个复杂的问题。
2.减速度判据控制
一节车的某一根轴滑行或四根轴以接近速度同时滑行,用速度差是判别不到的,这时就需要采用减速度判据进行控制。当车轮速度发生突变时,减速度值相应增大。当减速度值大于预定值时,防滑装置降低它所控制的制动缸压力;当减速度值逐渐减小,恢复到预定值时,防滑装置使制动缸保压;当减速度值进一步恢复,小于预定值时,防滑装置使制动缸压力逐渐恢复。
减速度标准是相对独立的标准,被检测的轴与其他轴无关。由于具有这个特点,所以绝大多数防滑控制系统(无论是机械离心式防滑器或电子防滑器)都采用此标准。
减速度判据值的确定对黏着利用也十分重要,部分防滑控制系统一般在减速度达到3~4m/s2时降低制动缸压力,而且作为定值,不受速度变化的影响。
3.减速度微分判据控制
使用减速度判断也有缺点。由于防滑机械部分动作的延迟使制动缸的压力变化作用滞后,有的防滑控制系统,例如安装在法国TGV车上的防滑器,在使用减速度判断的同时,引入了减速度微分进行辅助判断。因为当减速度达到判据标准时,虽然防滑装置动作,但需经过延迟时间Δt后,制动缸压力才开始变化。延迟时间内减速度的变化快慢会不同,即减速度的微分不同,这就有可能造成减速度变化快的防滑作用不良,而减速度变化慢的黏着利用不良。
引入减速度微分控制后,就有可能解决上述问题。减速度微分控制的判据是(https://www.xing528.com)
式中 a——开始检测计算时的减速度值;
da/dt——对减速度微分;
Δt——延迟时间。
假如判据达到“滑行”判断值,则防滑系统动作,经过延迟时间后,无论减速度变化快还是变化慢,制动缸压力开始变化时的减速度值都是相同的。控制制动缸压力开始变化时的减速度,可以保证良好的防滑作用和充分利用黏着。但这种判断方式对防滑系统要求较高,控制单元要有相当快的计算速度。
4.滑移率判据控制
滑移率是某一轴的速度与参考速度之差值与参考速度的比值。当采用滑移率作为判据控制时,认为某一轴的滑移率达到一定值时便会发生滑行,即对该轴的制动缸压力进行控制,其控制过程与上述几种判据变化控制方法相同。
国外的试验表明:滑移率与黏着利用是密切相关的,控制滑移率可达到充分利用黏着的目的。其中日本的研究表明:当黏着系数为最大值时,滑移率随轨道情况而变化,干燥轨道滑移率一般在3%~10%,所以认为“在微小滑行时,即使不产生缓解作用也会再黏着的情况很多,超过适当大小的滑行才进行缓解,有助于缩短制动距离”。根据法国的试验结果,除轻微滑移(蠕滑)的滑移率为0.5%~15%时达到一个黏着系数峰值外,与黏着有关的较大滑移,滑移率在5%~25%时有最大黏着点B,如图16-8所示。
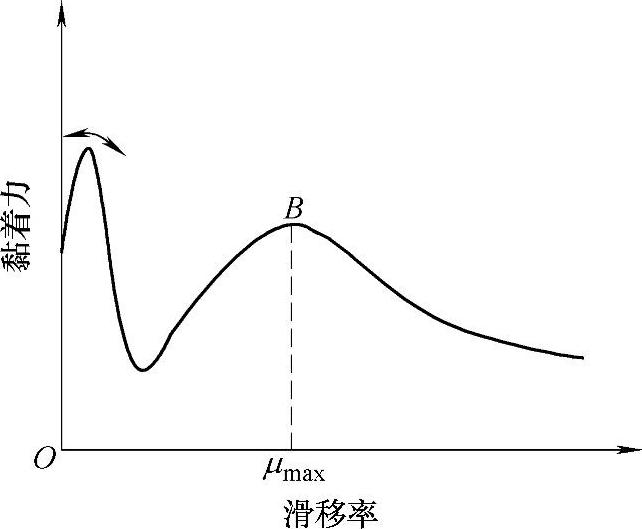
图16-8 滑移率与黏着力的关系曲线
日本进行了专门试验,试验中把滑移率维持在10%以下。当滑移率低于5%时,瞬时黏着系数变化很小;当滑移率超过5%时,黏着系数趋于下降。这表明,如果制动缸压力能被准确地控制,即车轮的滑移率能维持在确定水平,黏着就能得到有效利用,相应也可防止滑行的产生。在日本883系摆式车组(最大速度为130km/h)的制动试验中,使用常规防滑器,制动距离延长15%;而采用滑移率控制的防滑器,仅延长3%以内。
综上所述,根据轮轨间极限摩擦力水平,滑行控制的出发点是:在合理控制滑移率量值的基础上,充分利用和挖掘列车的黏着潜力,根据滑移率控制制动力,即通过控制制动力使车轮滑移率保持在一定范围内,完全能在防止滑行的基础上,充分利用黏着,防止制动距离延长过大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。