



本节实现上面所描述的实验场景,在不同的交通环境下调查车车通信对多车协同的影响,并证明所提出模型可以有效地提高交通安全和交通通行效率。为了定性地得到车车通信在多车协同行进中的重要性,本章将所有车辆配备车车通信可以实现多车协同和所有车不能进行无线通信的情况进行对比,从而分析有信息交流和无信息交流的车辆群在实验条件下的不同结果。
1.车车通信对多车协同行进的影响
依据前面所述,假设所有车辆都配有车车短程通信的设备,在此给出车车通信的通信范围为300m。此外,给出反应时间参数(tr+td)为(0.75+0.054)s。而作为对比试验,所有车辆都没有相互通信,并且感知周边情况靠驾驶员目测,所以给出探测范围为100m,反应时间tr为1.5s通信延迟为0s。
(1)低交通流密度场景
在低密度交通流高通行率的场景仿真时,交通流密度ρ=0.001veh/m2,车辆初始速度服从的正态分布N(30.93,1.2)。在此场景下分别对有无车车通信的条件进行30次仿真实验求平均值。
多车协同行进的空间-时间-速度结果图如图2-22所示。图2-22a、b分别表示有车车通信和无车车通信的仿真结果图,由图标可知,不同的灰度表示不同的速度,需要指出的是速度的平均值μ=30.93m/s,为了突出速度变化并对比,图中没有车经过的地方均为速度的平均值,即背景色为灰色。由图可知,其中很明显的深色部分是障碍物附近,无论有无通信,车辆在障碍物附近都会有明显的减速,来躲避障碍物,越接近障碍物速度越小。此外,将图2-22a和图2-22b进行对比可知,有车车通信的车辆群体因为有提前的信息传递和感知,提早减速,减速过程是连续平稳的,而没有车车通信设备的车辆在遇到障碍物的时候往往都是急制动,速度突变得比较明显。由此可见,具有无线通信的车辆群体间协作性较好,提前探测并相互传递有障碍物的信息并提早减速,更有效地协作避障。
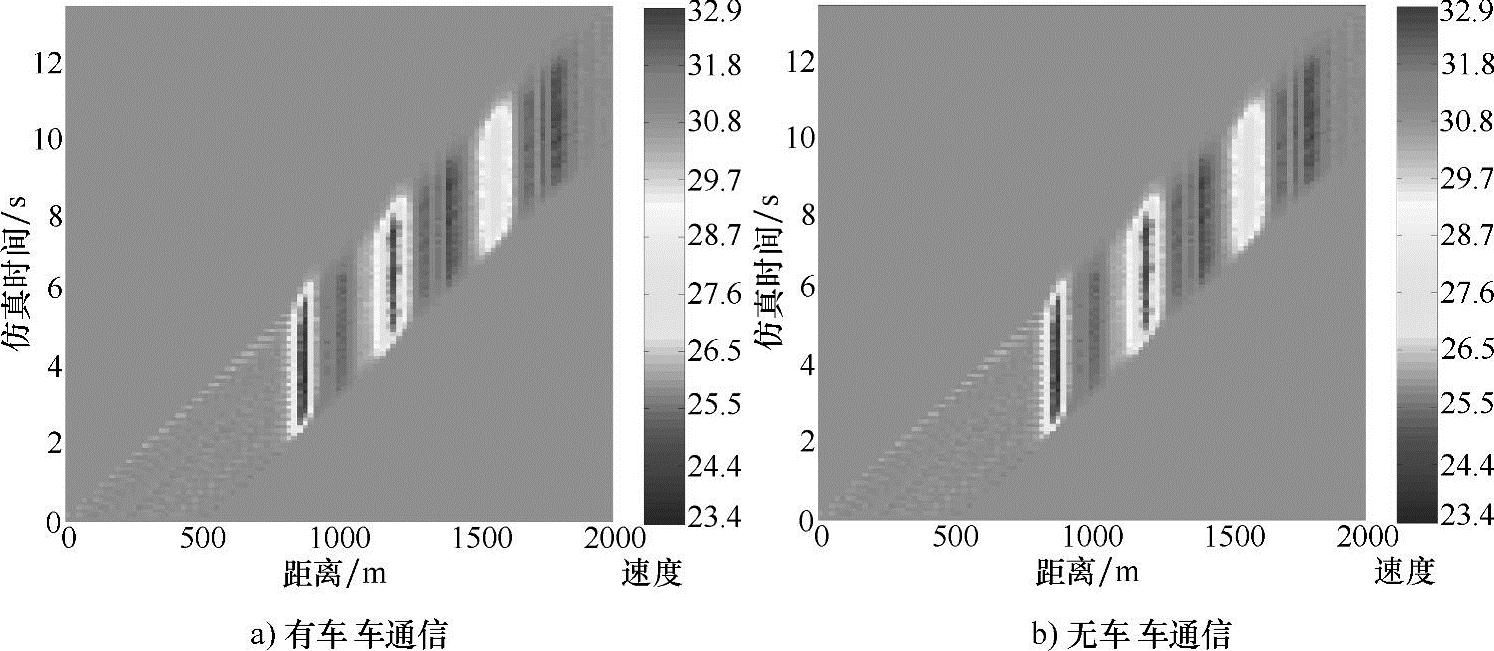
图2-22 低交通流密度下车辆的空间-时间-速度示意图
(2)高交通流密度场景
同样,在高交通流密度、低通行率的场景下,设置交通流密度ρ=0.0022veh/m2,给出车辆初始速度服从正态分布N(6.083,1.2)。同样的也在有车车无线通信和无车车通信的条件下分别进行30次仿真实验,结果如图2-23a、b所示。比较图2-23a和图2-23b可得出和上一场景相同的结论,在接近障碍物的过程中有车车通信的多车协同要比无车车通信减速更缓和、更提前、更安全。此外,图2-23a中的深色区域的范围要比图2-23b中深色区域的范围更宽,这说明,车车间的通信可以使车辆提前知道有障碍物需要避让,并做好减速准备,提前减速。
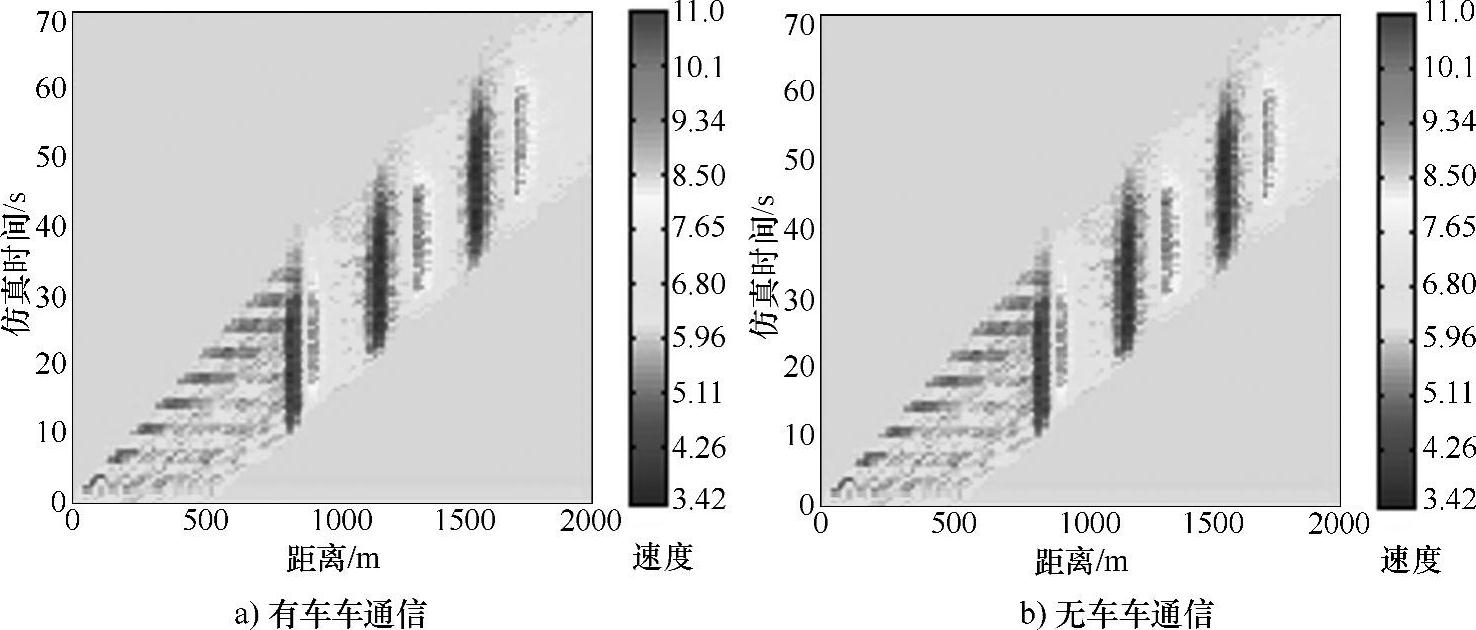
图2-23 高交通流密度下车辆的0空间-时间-速度示意图
2.车车通信对交通安全和车辆群体通过率的影响
为了量化车车通信对交通安全和车辆群体通过率的影响,首先给出两个评价指标“碰撞率”和“整体通过率”。碰撞率表示在行进过程中车辆和障碍物间的或车辆间发生碰撞的概率,我们将进入其他车辆或障碍物实体半径中视为碰撞。第i次仿真中发生碰撞的概率如下:

其中,SimEpochi表示第i次仿真试验中总的模型运行次数,CollisionEventi(k)表示在第i次仿真第k次运行中发生的碰撞次数。Ni表示在第i次仿真中生成的车辆总数。
另一方面,用障碍物圆心所在的平面上的整体通过率来评价多车协同行进时的交通安全和通行效率。在第i次仿真中,将车辆群体中的第一辆通过对应的障碍物圆心Ok所在平面的时间记为t1i,k,将车辆群体中的最后一辆车通过该平面时的时刻记为t2i,k。则将计算障碍物Ok处的方法如下:

接下来,进行了不同的对比试验,设置交通流密度均为0.00016veh/m2且初始速度服从方差σ为1.5km/h,均值μ分别为15km/h、25km/h和30km/h的正态分布。在不同的速度均值下分别进行30次仿真实验并计算不同情况下的碰撞率和整体通过率。(https://www.xing528.com)
图2-24a、b给出在有车车通信和无车车通信下车辆的碰撞率对比。在障碍物2和3处并无车辆与障碍物的碰撞,所以只给出车辆在障碍物1处和车辆间的碰撞率。从图2-24中可见,车辆和障碍物的碰撞率和车辆间的碰撞率随着平均速度μ的增长而增加。车辆移动速度越快,与其他车辆或障碍物的碰撞趋势也越高,这与现实生活中的经验相符。但是,在车车通信的辅助下,车辆发生的碰撞会明显减少,这意味着车辆间互相通信,提供道路信息可以提高道路安全水平,提前感知并减速,减少碰撞。
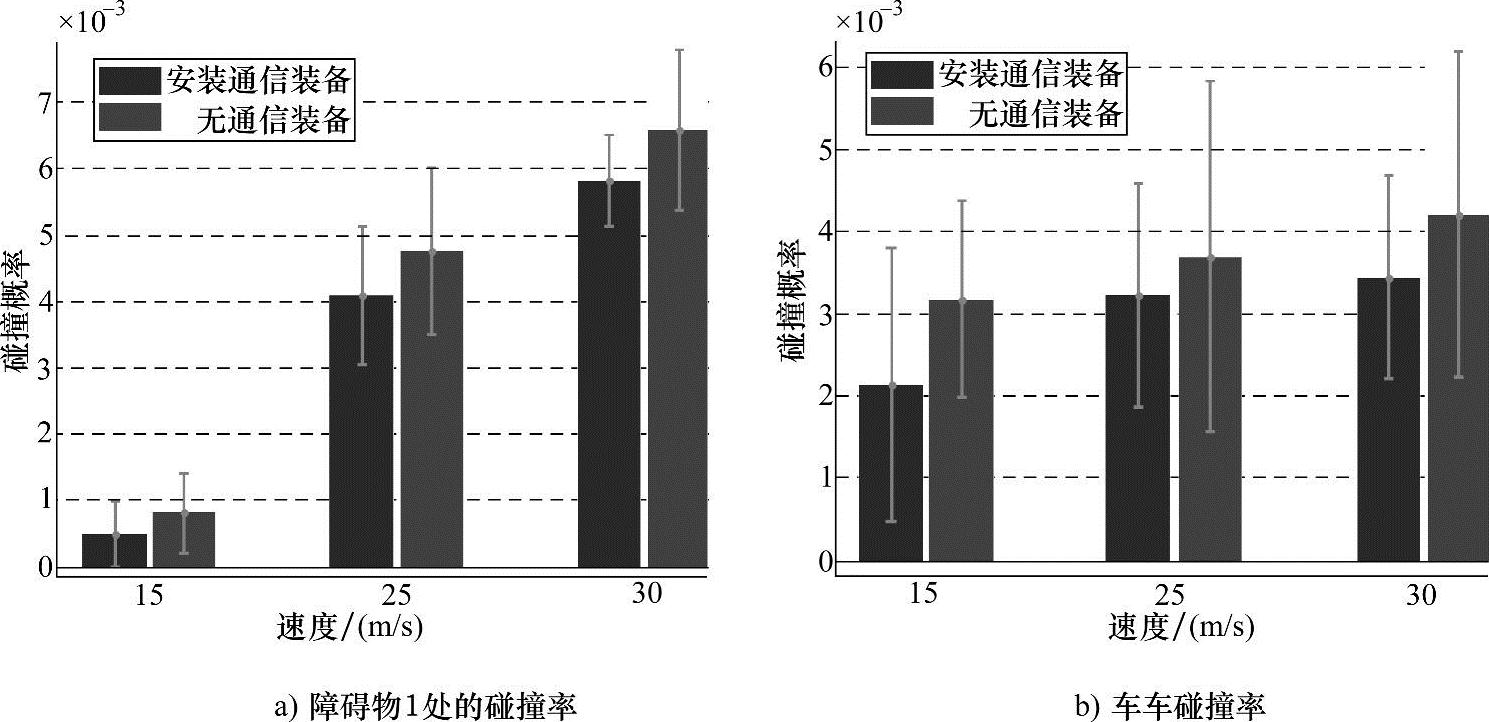
图2-24 碰撞率
此外,车辆群体经过不同障碍物面的整体通过率在图2-25中给出,很明显有车车通信的车辆的整体通过率要高于无车车通信的车辆群。以图2-25a为例,在平均速度25m/s的试验下,有车车通信的车辆的整体通过率比无通信的车辆提高26.85%。对比表明了车车通信在提高交通通行效率方面的重要作用。
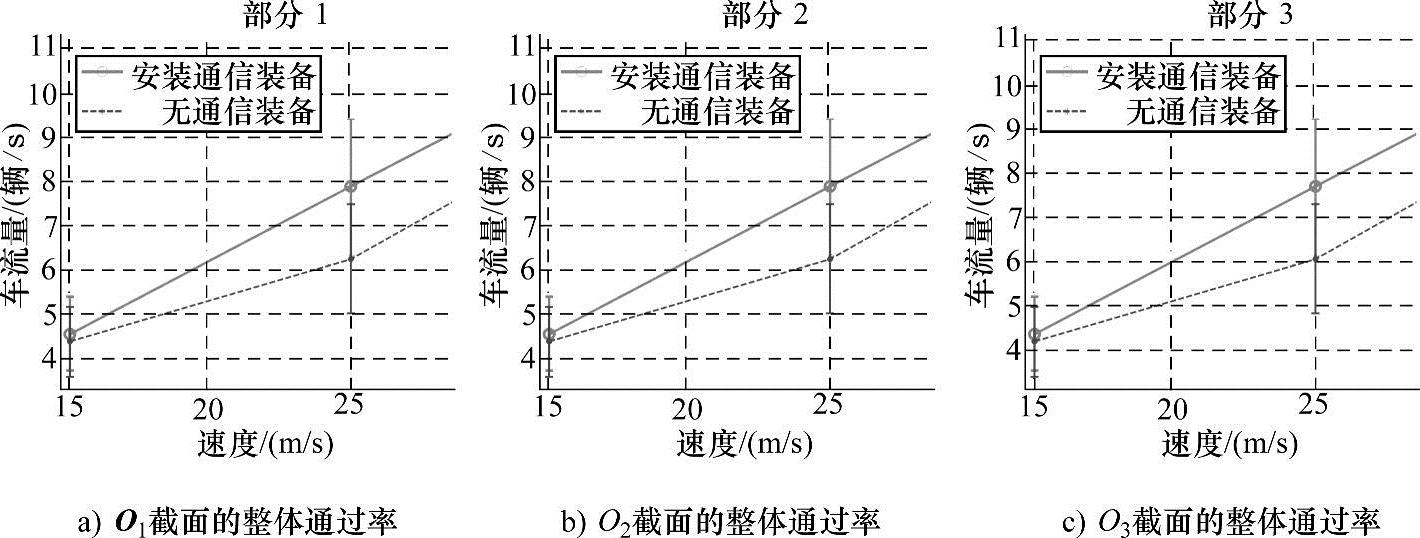
图2-25 整体通过率
3.不同通信范围的影响
在此,假设所有的车辆都配备了车辆感知和相互通信设备,进而考察通信范围这一主要特征对车辆安全的影响。在两种交通流场景:一是自由流场景,二是高峰期场景,进行了不同通信范围的实验对比分析。
(1)自由流场景
自由流场景下交通流密度为0.001veh/m2,车辆初始速度服从平均速度μ为29.15m/s和标准差σ为1.5m/s的正态分布[9]。在不同的车辆无线通信范围d为200m、250m、300m、400m和500m分别进行30次仿真实验。对每次仿真结果求平均值,结果如图2-26所示。所有车辆均在障碍物2和3处避障成功,即碰撞率为0,所以只给出障碍物1处的碰撞率。
由图2-26a和b可知,通信范围越大碰撞率越低,这也说明车车通信的应用会提高多车协同行进的安全性。每个以一定速度运动的车辆类似于智能体并且他们的车载通信网络的拓扑结构在运动过程中是不断变化的。依据本章所给模型,其中多车协同行进的方式倾向于自组织效应,更有利于车车间的信息传递和提醒。因此,车辆间碰撞的概率可以保持在一个相对较低的水平。
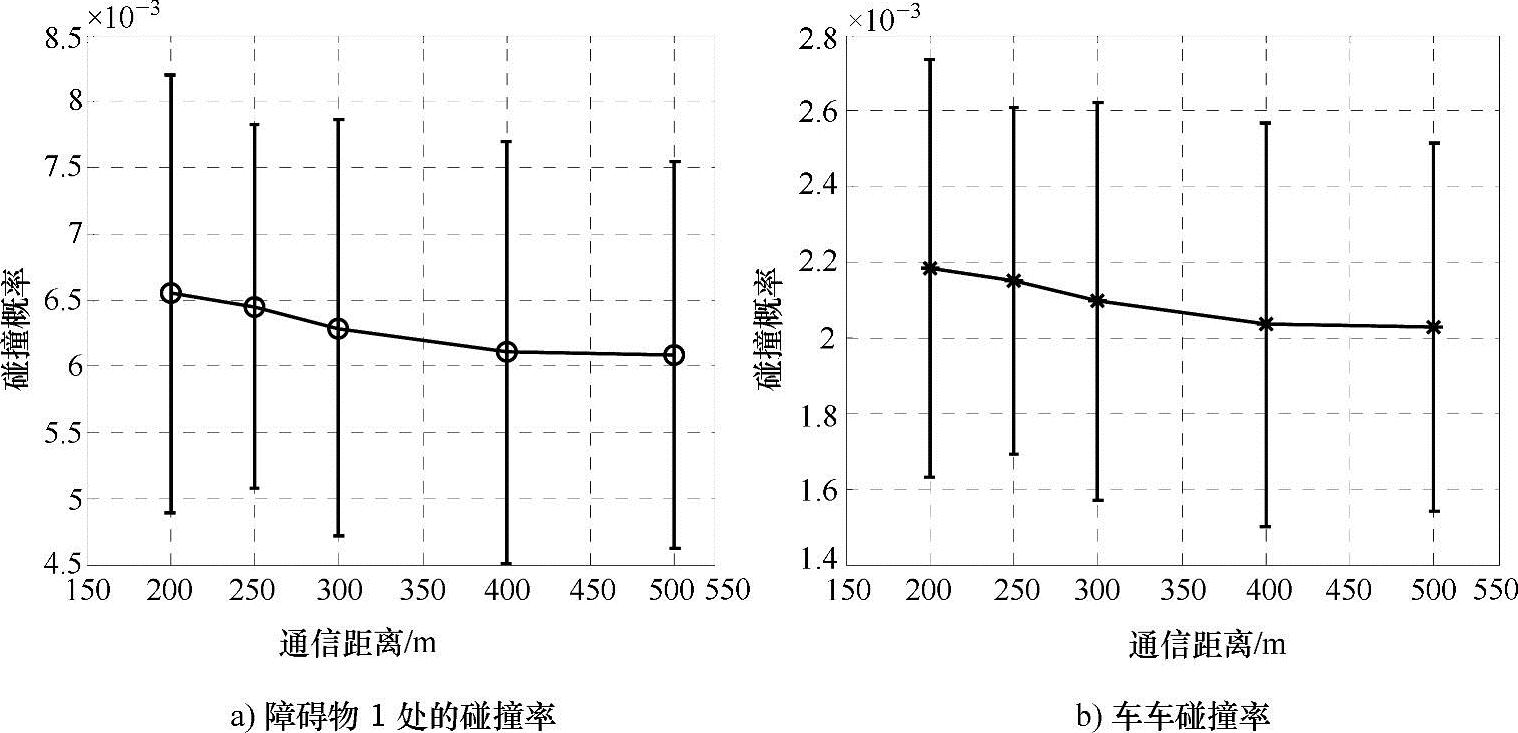
图2-26 不同通信范围在自由流场景下示意图
(2)高峰期场景
高峰期参数取值,交通流密度为ρ=0.0022veh/m2,对应的车辆初始速度服从正态分布N(10.73,2),实验设置和上述情况相同,类似的结论在图2-27中给出。较大的通信范围可以提高车辆安全,另一方面,通过比较在图2-26和图2-27中的结果可以看到,在密集的交通流情况下平均的碰撞概率较小。原因在于,在这种密集交通流量的交通场景中,车辆行驶的平均速度要低得多,而且有车车间信息传递,发生碰撞的概率就会降低。此外,密集的交通流意味着车载无线网络中有更多的移动节点,警告信息可以更有效地传播。因此,综合这些情况,多车协同行进会提高安全水平。
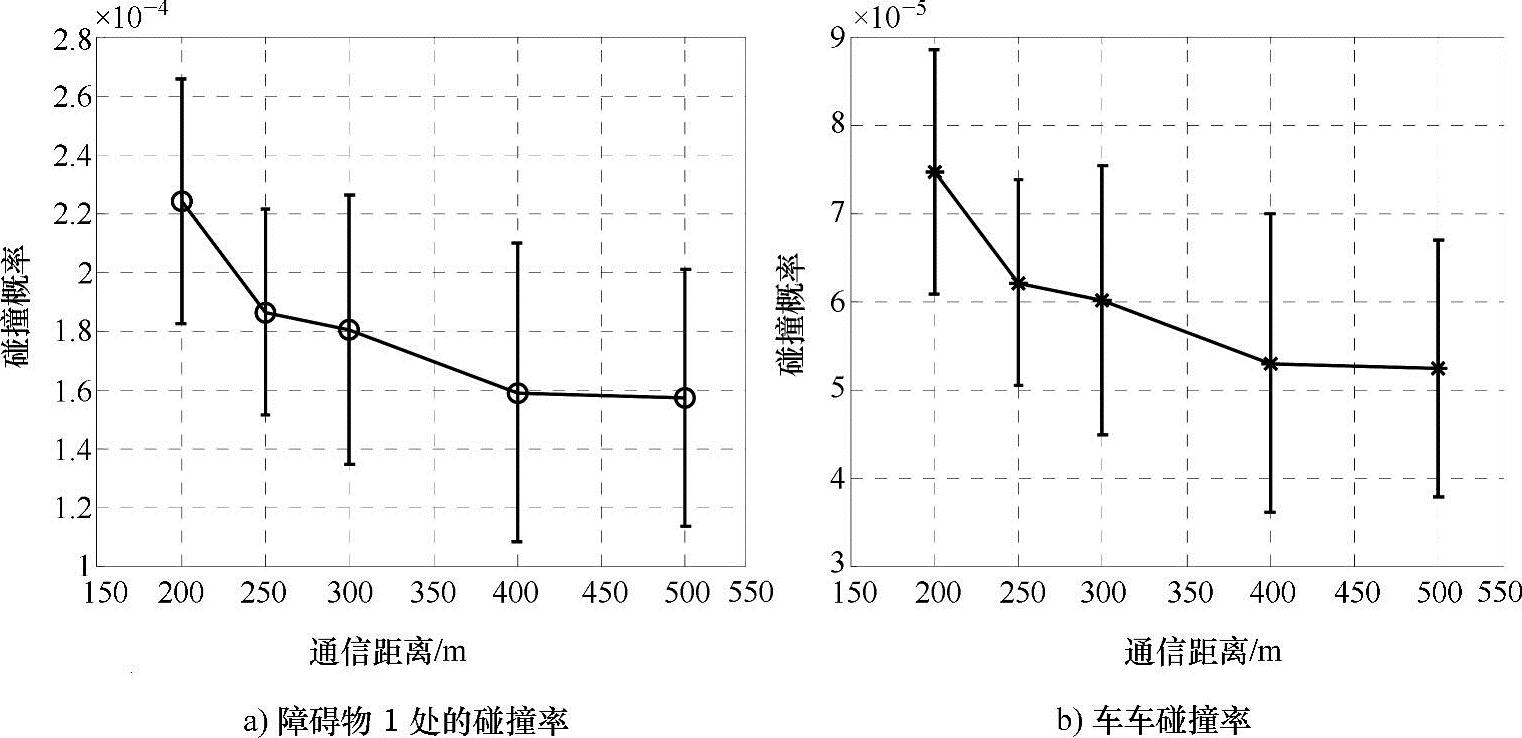
图2-27 不同通信范围在高峰期场景下示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。