



【摘要】:以上三个区域禁止通过车辆需绕行。图2-21 道路仿真示意图仿真开始时,初始化车辆的速度,满足速度分布,随机生成,并设置初始化区域在道路前500m、宽40m处。在所有仿真中,设置更新车辆状态的时间步长为0.1s,即模型会在离散的每0.1s运行一次。此外,仿真中运行车辆的总数由交通流密度参数ρ来决定。μ表示车速的平均值,σ是方差。此外,模型中涉及的其他的参数设置见表2-2。
为仿真多车协同避障的行为,设置了如图2-21所示路段,此路段长2000m、宽50m、单向车道,在路中第一个障碍物区域表示追尾事故现场,用O1表示;第二个障碍物区域表示道路维修路段,用O2表示;第三个障碍物区域表示路中有障碍物需避让,用O3表示。以上三个区域禁止通过车辆需绕行。本章给出这三个虚拟障碍物圆的半径分别为5m、10m、10m,其具体位置如图2-21所示。
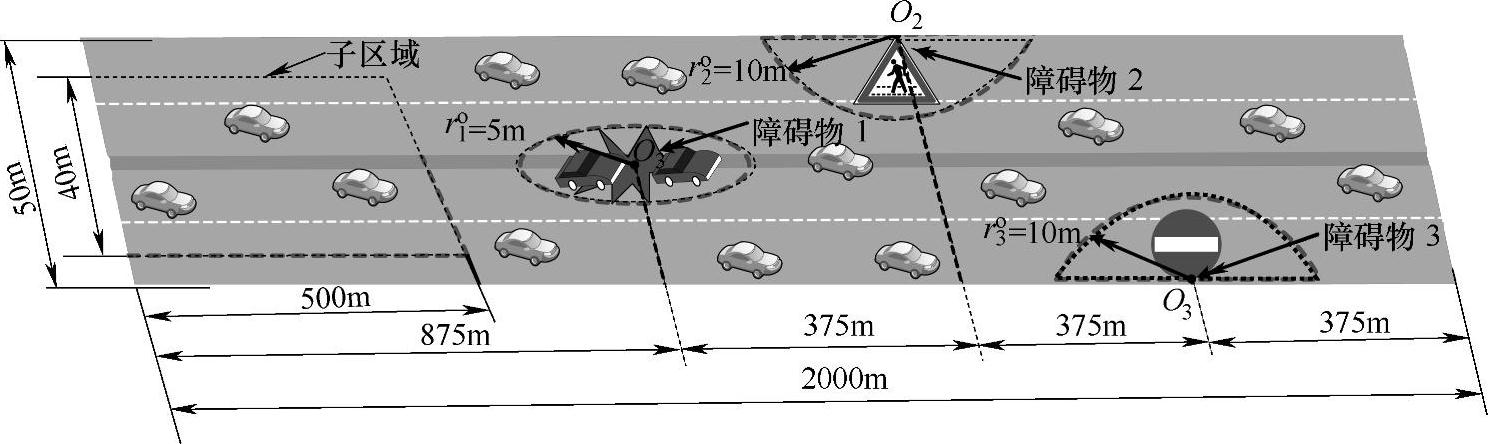
图2-21 道路仿真示意图
仿真开始时,初始化车辆的速度,满足速度分布,随机生成,并设置初始化区域在道路前500m、宽40m处(图2-21)。在仿真过程中,这些车辆会依据所提出的模型作为一个群体,集体行进,当所有车辆驶出给出的这段路时,仿真结束。在所有仿真中,设置更新车辆状态的时间步长为0.1s,即模型会在离散的每0.1s运行一次。
此外,仿真中运行车辆的总数由交通流密度参数ρ(veh/m2)来决定。车辆初始化的速度服从正态分布N(μ,σ),在不同的交通流密度的情况下所服从的整体分布也有所不同[8,9]。μ表示车速的平均值,σ是方差。涉及具体分布会在具体的实验分析时给出。(https://www.xing528.com)
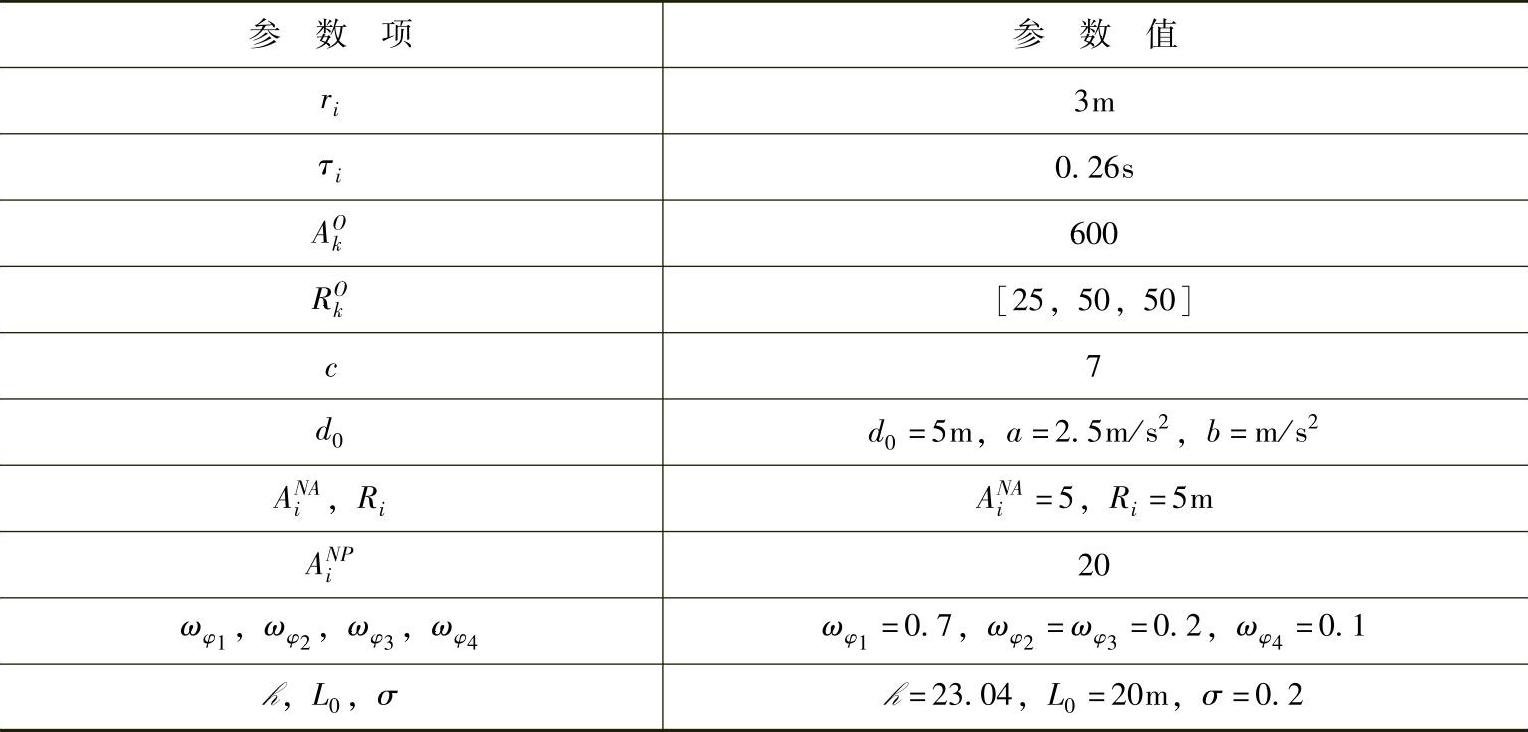
此外,模型中涉及的其他的参数设置见表2-2。
表2-2 参数设置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。