



当交通场景中发生安全事件时,车载多模式通信平台需要更为可靠的无线链路将安全事件的消息以MAC层广播的形式传输给其他车载通信平台,此时,针对高速运动场景下的无线通信可靠性保障,多模式通信平台将切换到DSRC通信模式。本节首先对DSRC广播技术进行介绍,然后提出一种自适应的广播消息频率算法,它能在最大程度地节约通信平台资源的同时,保证安全消息的及时传递。最后通过仿真验证算法的功能。
(1)DSRC广播技术介绍
广播是指网络中某一源节点将一条消息发送给临近网络中的所有节点的通信过程。车载环境下的安全消息发送,一般都是基于广播模式发送的。车载环境下的DSRC广播通信是许多安全应用的基础。车载环境下车载网络拓扑结构本身具有一定的规模,因此,传统的大规模频繁广播容易导致网络中出现许多冗余的报文。某些时刻,广播会造成大量的通信开销和冗余报文,这很容易引起广播通信质量的下降。同时,在车载环境下一旦发生紧急情况,如交通事故预警、车车避撞、车车协同控制等,某些面向安全的应用需要通过DSRC进行快速广播,必须最大程度地保证车载网络节点能够紧急处理相应情况。
本节首先介绍现有的DSRC面向安全消息的广播通信协议,然后根据车载环境的特点以及IEEE802.11p/1609协议的性质,提出一种自适应的安全消息广播算法,它能有效改善车载环境下的DSRC通信性能,保障行车安全,同时能动态调整广播发包频率,节省带宽和能耗,是多模式通信平台关于网络管理体系的重要组成部分。
DSRC广播面向安全应用消息的主要目标是低时延、高可靠性。但实际的车载网络体系中,车辆的拓扑结构常常快速变化,同时链路的不可靠性会给DSRC通信带来更大的挑战。车载环境下,一个密集的网络中由于大量冗余的数据包会导致信道拥塞,而IEEE 802.11p协议并没有为DSRC广播通信设定信道恢复机制。
车载环境下,信道介质处于共享状态,盲目的广播数据包容易导致相邻节点之间的通信竞争和冲突。这种现象称为广播风暴。同时,以最大发送频率广播安全消息并不能保证道路上所有车辆都能够接收此消息,反而可能容易引起网络拥塞。而且由于车辆的高速移动,车辆之间的距离快速变化,在车载环境下试图以一个恒定的频率发送数据包也显然不是最优的。
(2)自适应DSRC模式广播算法
为了最大程度地降低多模式通信平台通过DSRC模式广播消息的冗余广播数,本书设计了自适应调整广播频率的算法及策略。在保证车载环境下安全消息及时到达的同时,也能降低能耗,节省带宽。在车载环境下的通信平台,其能量和带宽非常可贵,因此设计一种保证安全消息及时达到目的节点,在避免碰撞的同时,能有效地减少车载环境下的冗余信息发送,从而节约利用各种资源。下面从几个方面展开此算法的设计。
当交通场景中发生安全事件时,车载多模式通信终端需要更为可靠的无线链路将安全事件的消息以V2V或者V2R的形式传输给其他交通实体,因此,针对高速运动场景下的无线通信可靠性保障,多模式通信系统将切换到DSRC通信模式,利用DSRC技术为安全消息的传输提供可靠的无线链路。本节引入微观交通跟车模型与无线信道的两点传输概率模型,对最大可容忍消息传输时延(the maximum tolerant message delivery latency)以及DSRC无线信道的数据丢包率(packetlossrate)进行理论建模,然后在最大可容忍消息传输时延以及数据丢包率约束条件下,设计一种基于DSRC的数据包广播的算法,使得车载终端广播数据包的频率可根据传输时延和数据丢包率动态调整,实现车车间安全消息可达性的保障,从而有效避免车辆碰撞的发生[21]。
本算法考虑常规交通流场景,如图1-5所示。假设某一车辆1(用符号V1表示)发生紧急事件,则其多模式通信系统切换到DSRC链路,需要通过DSRC通信模式向周围邻居车辆广播紧急事件的消息。为了有效地保障车辆的安全运行,车辆V1的安全消息需要可靠地广播给周围的车载终端,为其他车辆的驾驶操作提供信息决策或者安全预警。假设车辆V1的邻居车辆都具备DSRC车载通信功能,且车车间的信息传递为单跳传输方式,则可进一步地考查该车辆V1与其最邻近的跟驰车辆V2之间的信息传输过程。其中,为了简化分析,假设研究的相邻两辆车处于同一车道的直线运动状态。
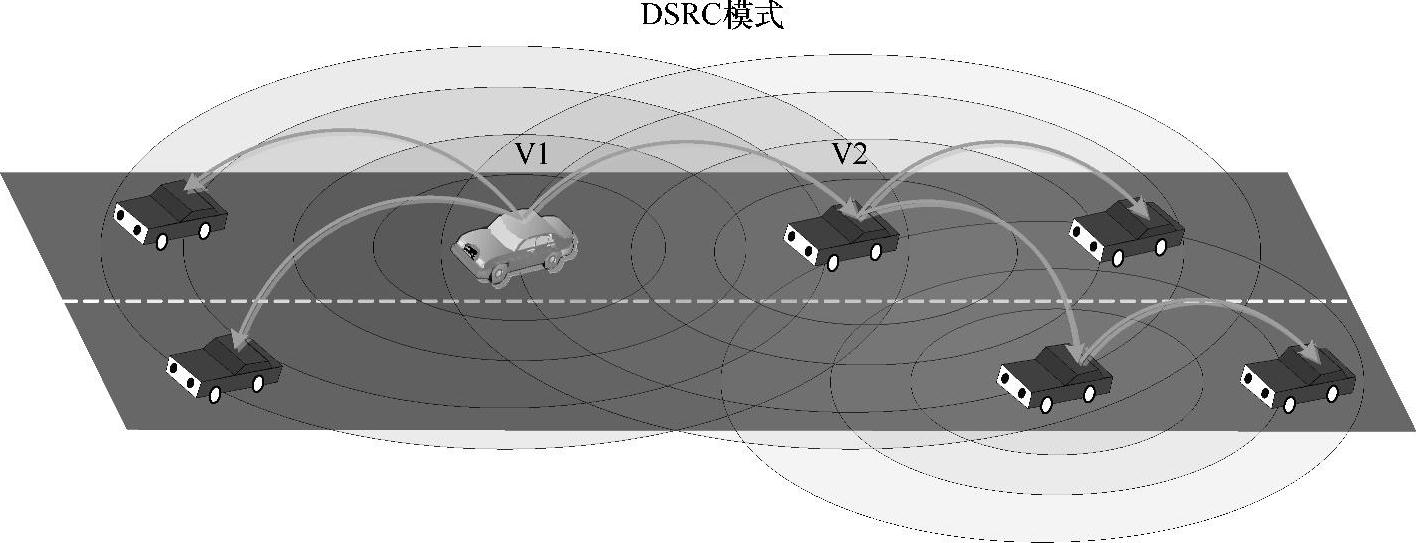
图1-5 基于DSRC通信模式的安全消息广播
在前述模型场景下,首先对两车(车辆V1和车辆V2)之间安全消息的广播域接收时延最大容忍值进行建模计算。记车辆V1与车辆V2之间的数据包传输时延为tc,假设车辆驾驶人的反应时间为tr,本书用(s1(t),v1(t))和(s2(t),v2(t))分别表示该两辆车的瞬时位置和车速。在匀加速直线运动假设下,车辆V1在遇到紧急情况进行制动后,车辆的运动方程可表示为(t≥0)

式中,s01和v01分别表示车辆V1在t=0时刻的位置和车速;参数a表示车辆紧急制动的减速度。同理,在式(1-1)的基础上建立车辆V2的运动方程:

经过(tc+tr)的时间,如果车辆V2尚未接收到前车V1发送的安全消息,则后车V2以恒定车速巡航,V1和V2之间发生碰撞的时间间隔为(tc+tr)。为了进一步简化分析,假设后车在进行制动前,道路的局部交通流处于平衡状态。因此,记平衡交通流的平均车速为V,则v1=v2=V;初始时刻两车的车间距离为S=s1-s2。记两辆车发生碰撞的时间为tcosillion,则在式(1-1)和式(1-2)基础上求解s1(t)=s2(t),得

根据式(1-3),当给定条件:

以及给定
 (https://www.xing528.com)
(https://www.xing528.com)
时,不成立,即两辆车间不发生碰撞。由此,根据式(1-4)和式(1-5)可以求解出车辆V1和车辆V2之间避免发生碰撞的最大可容忍消息传输时延,记为tmaxc:

在交通流平衡状态下,参数V和参数a可通过车辆V1自身的速度传感器和加速度传感器获得,参数S表征了车辆V1与车辆V2的间距,该参数的信息可由其他通信模式(如3G网络)获得,例如,车辆V1通过3G车联网的后台交通数据中心和车辆V2共享局域实时位置信息。
算法采用丢包率衡量通信平台DSRC模式下的通信性能。在DSRC通信模式下,为了使安全消息能够可靠地被发送到目的车载终端,多模式通信系统采用周期性广播方式发送消息。因此,前后跟驰的两辆车能够避免发送碰撞的条件,即在最大可容忍消息传输时间约束0≤t≤tcmax条件下至少存在一个安全消息的数据包被接收方车辆成功接收。本书中,将两车在DSRC信息交互方式下避免发生碰撞的概率为DSRC通信模式下安全消息广播丢包率(记丢包发送的概率为ploss)的函数。另外,假设安全消息发送方车辆的消息广播频率为f,亦即每间隔T=1/f发送一次安全消息数据包。假设第n+1次发送的数据包被接收方车辆第一次成功接收,亦即前n次(n=0,1,2,…)发送的数据包丢失,该情况下的概率为(1-ploss)pnloss,则数据包被车辆V2成功接收时刻的概率分布函数可写为

当时间t<tmaxc时,根据式(1-6)的分析可知,车辆V1和车辆V2可避免发生碰撞,于是,在基于DSRC的数据广播模式下,由式(1-7)可得前后两辆车避免发生碰撞的概率为

式中,δ和Θ分别是delta函数和阶跃函数。于是,基于式(1-8),进一步可得
到DSRC消息广播最小的发包频率frmin:

当给定(1-Psafety)时,利用模型式(1-9)可根据DSRC通信过程中的数据包传输时延tc,最大可容忍消息传输时延tmaxc以及数据丢包率ploss动态计算最小发送数据包的时间间隔Tminc=1/fminx。进一步,可根据模型式(1-9)设计整个DSRC通信模式下的自适应安全消息广播算法,如图1-6所示。
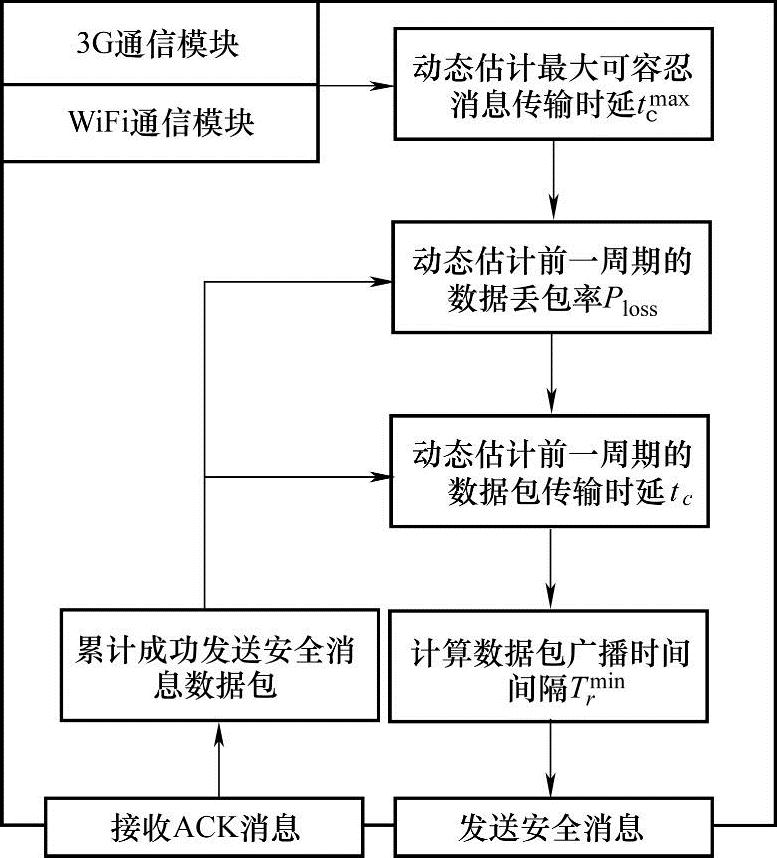
图1-6 基于DSRC的自适应安全消息广播算法
(3)算法仿真与结果分析
本算法仿真的目的在于验证多模式通信平台DSRC广播算法的性能。通信平台广播机制的目的是根据当前丢包率和传输延迟,自适应调节广播安全信息的频率。
面向车车通信模式进行仿真,分别对比采用广播频率自适应算法策略与尚未采用该算法策略的结果。如图1-7和图1-8所示,给出了跟驰两辆车间距离变化情况下车车通过DSRC广播数据产生的无线传输时延和丢包率的仿真结果。从总体上分析,可知随着两车间距离的增大,车车无线数据传输的时延和丢包率有所上升。但是,对比尚未采用广播频率自适应算法策略的结果,以上提出的算法能够有效地降低无线传输的时延和丢包率,这进而验证了算法的合理性和有效性,为异构网络下改善DSRC广播消息性能提供了理论基础。
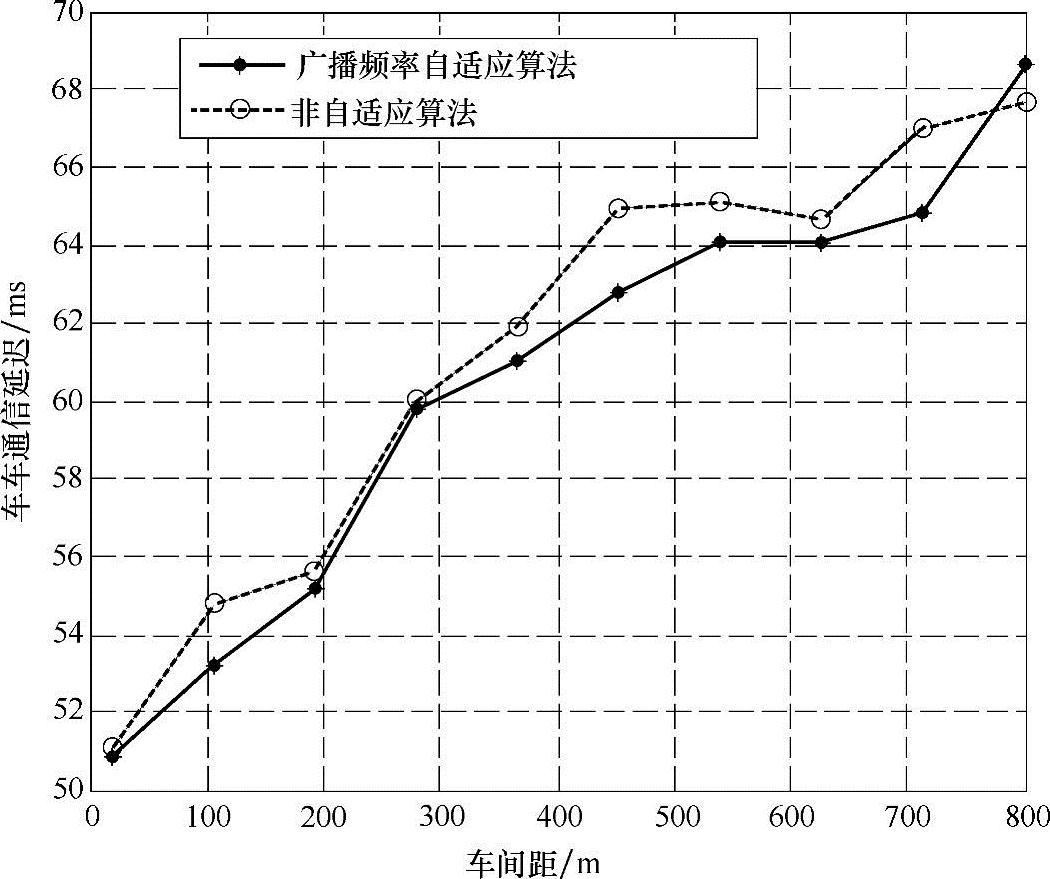
图1-7 DSRC广播算法仿真结果1
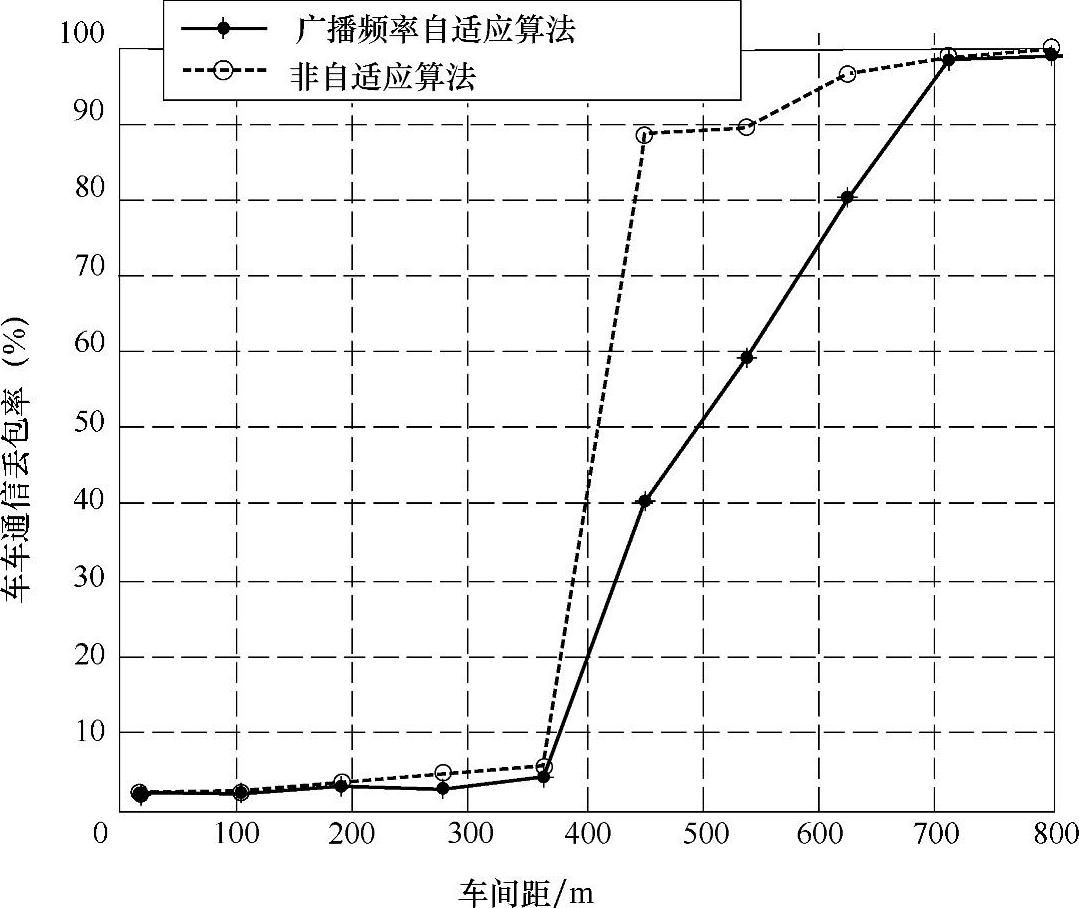
图1-8 DSRC广播算法仿真结果2
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。