



除了用体积声源来确定板振动对车内噪声的传递函数并根据每块板的振动来进行贡献源分析外,还可以用其他一些方法来测试板的振动和声辐射,如窗口方法、声强测量、激光测量、近场声全息和波束形成方法,下面简单介绍这几种方法。
1.窗口测量方法
为了研究板振动对车内噪声的贡献量,将车身板分成若干区域,如2030个区域,首先用声学材料将整车车身板覆盖,如图3-31a所示,测量车内噪声。声学材料包括吸声材料和隔声材料,厚度通常达到50mm。然后,去掉某个区域的吸声和隔声材料,即留下了一个窗口,如图3-31b所示,再测量车内噪声。比较以上两组测量数据,就可以得到这个区域的噪声贡献。每个区域都这样做,就得到了每个区域板振动对车内噪声的贡献。这种方法被称为窗口测量方法。
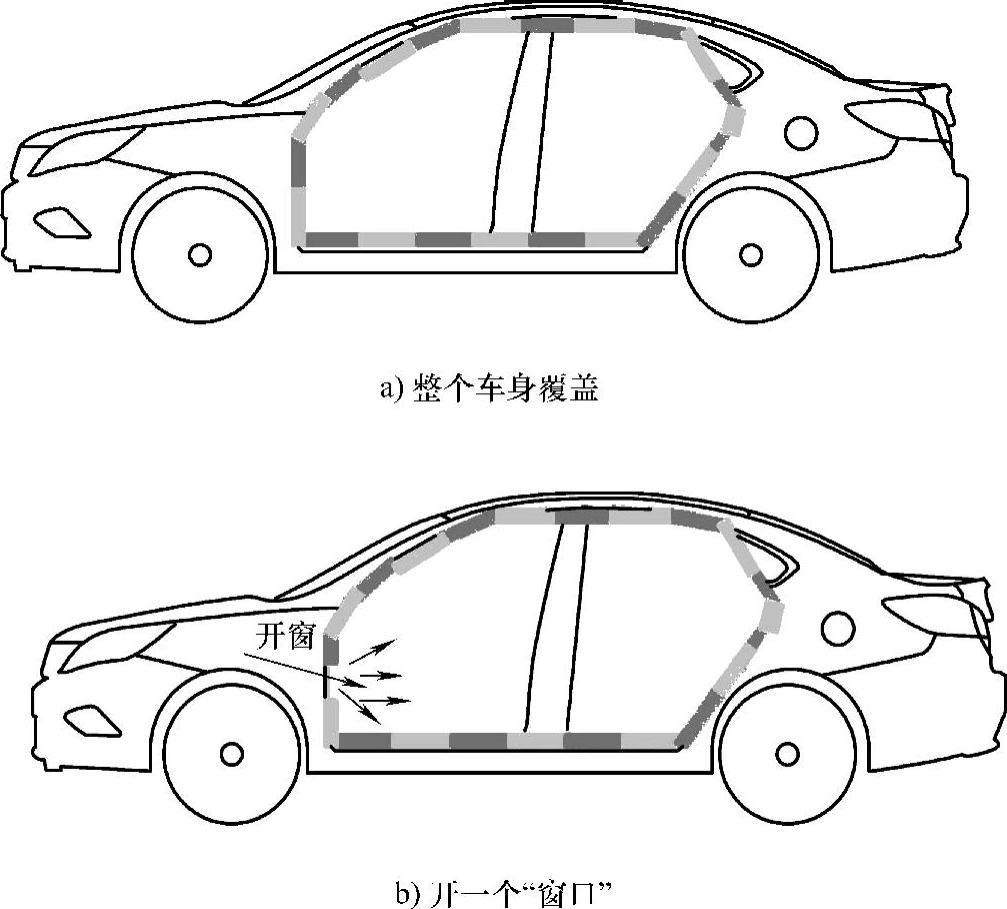
图3-31 车身板窗口测量方法
这种方法的优点是简单,在工程上用得比较多,测试结果比起板声辐射贡献源方法要可靠些。但是由于这样“开窗”测量单独板振动对车内的贡献,失去了板与板贡献之间的相位关系,因此对低频不准。窗口方法只适用250Hz以上的情况。另外,覆盖材料很重,很难加在顶棚板上,所以使用起来不方便。
2.声强测量
声强是指在垂直于声波传播方向上,在单位时间内、单位面积上通过的平均声能量,表示为

式中,p和v分别是声压和声速;Re表示实部。
声强可以通过两种方法得到:第一种方法是直接测量出声压和介质的速度,根据式(3-46)计算出声强;第二种方法是采用两个传声器来测量附近两点的声压,然后计算出介质速度,再计算声强。因为介质的速度很难直接测量,所以第一种方法很少用,而实际工作中,基本上采用第二种方法。在理想流体介质中,对于小振幅声波,介质的速度和声压存在如下关系:

用两个靠得很近的传声器来测量声压梯度,就可以得到平均声压和介质速度,分别表示为

式中,p1和p2分别是两个传声器测量到的声压;Δr是两个传声器之间的距离。
于是,声强可以表达为

式中,∗表示共轭复数。
将式(3-50)两边进行傅里叶变换,可以得到用声压的互谱来表示声强的表达式,为

式中,G12(ω)表示声压p1和p2互谱;Im表示取虚数。
由式(3-50)可知,将两个传声器放置在一起,便可以测量声强。两个传声器按照一定的排列放置在一个支架上,形成声强探头,如图3-32所示。两个传声器之间的距离为Δr。声强测量系统由探头、分析仪和显示仪组成。
声强既有大小,也有方向,是一个矢量。用声强测量方法来识别噪声源利用了声强的矢量特征和探头对声波方向的敏感特征。图3-33给出了一个声源和探头之间的关系。
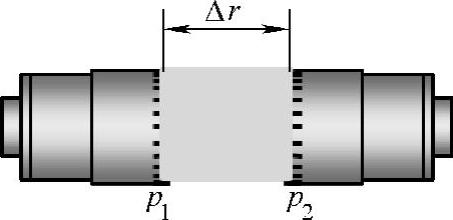
图3-32 声强探头
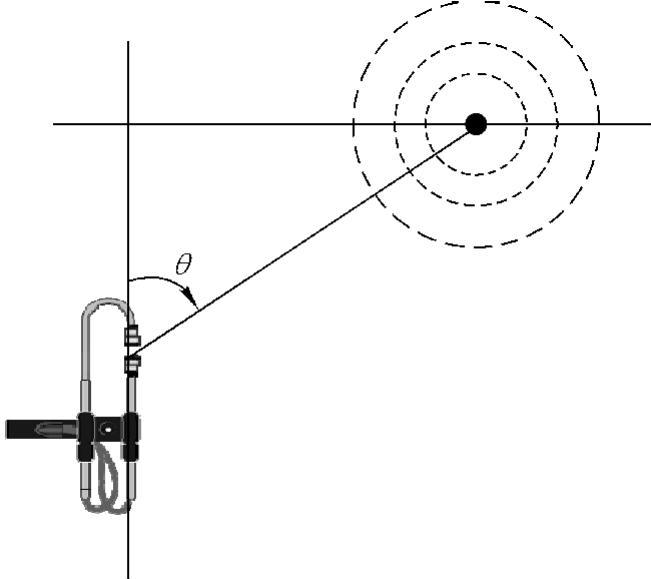
图3-33 声源和探头之间的关系
声强探头的轴线与声源点到探头中心点连线之间的夹角为θ。当θ=0°或θ= 180°时,声强最大,I(0°)=I(180°);当θ=90°时,声强为0。θ角在0°180°之间变化,在任意θ时的声强为I(θ),可以写为

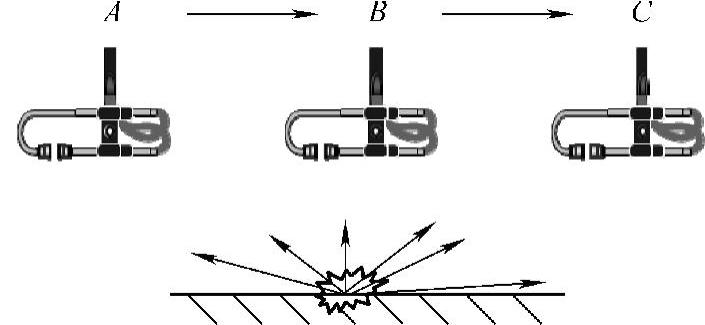
图3-34 探头扫过声源的示意图
图3-34表示探头扫过声源的示意图。从A点到B点,声强由大到小;而从B点到C点,声强由小到大。B点是个转折点,声强为零。由此可以识别出声源的位置。
声强是矢量,具有很强的方向性,因此测量环境对声强测量影响不大。而声压是标量,需要在特定的声学环境(如消声室、混响室)内测量。与声压测量相比,声强测量的适应范围更广,被广泛地应用到声功率测量、声源定位、隔声量测量等方面。声强测量系统的校准比声压测量难,因为它包括了大小和相位。在汽车NVH领域,它可以在室外进行近场测量,环境噪声的干扰很小。用声强探头测量噪声,非常便捷,也非常快。
3.激光测量法
激光测量法是一种非接触式的振动测量方法。激光测振的方法有几种,如激光多普勒测振、激光全息测振和电子斑干涉方法。其中,激光多普勒测振得到了广泛应用。
物体辐射声波波长随着声源和观测位置的相对运动而变化,这种现象被称为多普勒效应。在运动的声源前面,声波被压缩,波长变短,频率变高;在运动的声源后面,声波被拉长,波长变长,频率变低。
多普勒效应不仅适用于声波,也适用其他种类的波,如电磁波、光波等。一定频率的激光射到运动物体上时,反射波的频率会随着物体运动速度的变化而变化。激光多普勒测振就是利用多普勒效应来测量运动物体的速度和位移的。(https://www.xing528.com)
在进行车身板结构贡献源测量时,采用在车身板上布置加速度传感器来测量振动的方法有几个困难:一是需要布置很多传感器;二是传感器的质量会改变板的频率和模态;三是在风洞测试时会引起额外的激励源。激光测量克服了这些困难。由于非接触式的测量不需要传感器,不会改变车身板结构的特征。
图3-35为激光测量车身振动的示意图。激光测量仪将参考光束和测量光束打到车身板上,就可以得到各个频率下的板振动信号。如果汽车放置在风洞内被风激励或者放置在转鼓上被激励,就可以得到在运动状况下各块板的振动贡献。如果车身被激振器激励,就可以得到车身的模态。图3-36为用激光测量得到的某个车身振动响应。
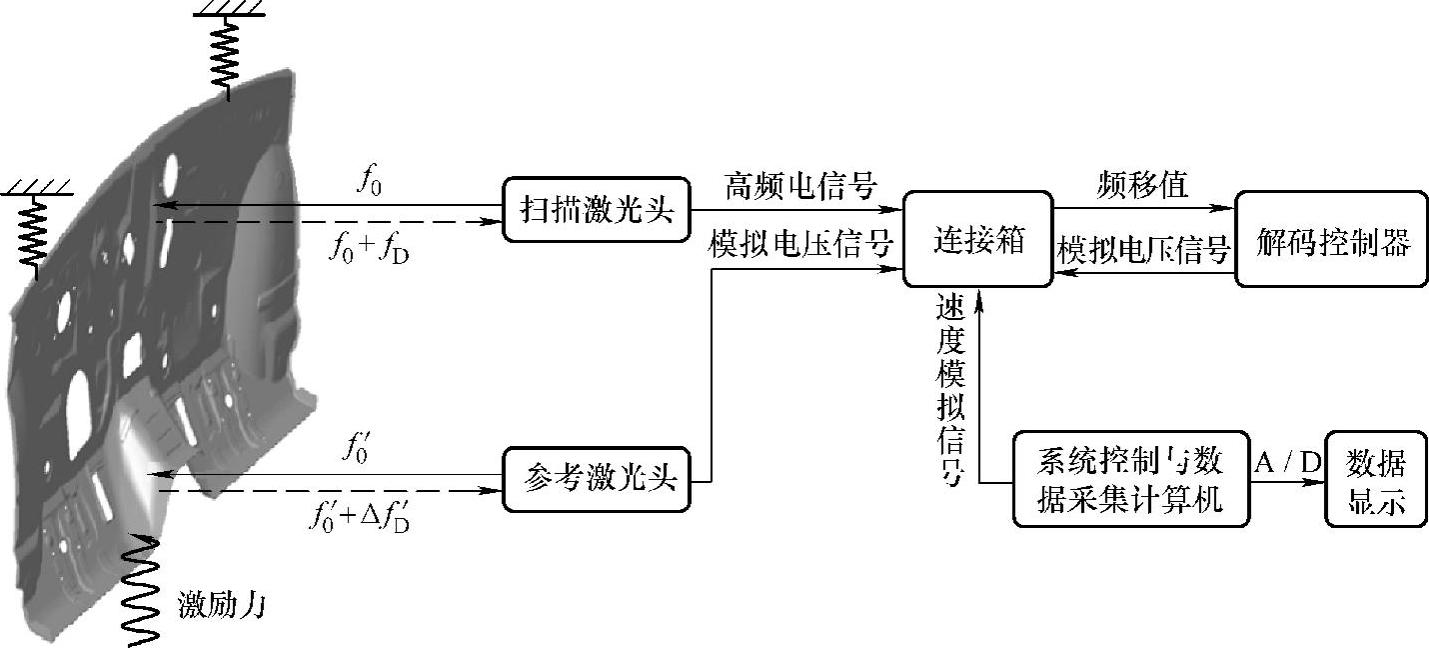
图3-35 激光测量车身振动的示意图(见彩插)
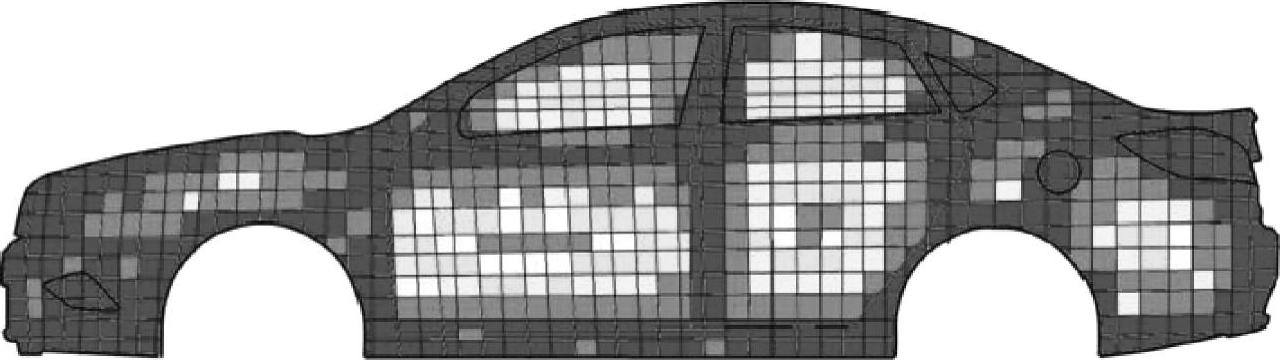
图3-36 用激光测量得到的某个车身振动响应(见彩插)
近年来,由于它的非接触式和快捷等特征,激光测量得到了广泛应用。但是它有一个缺陷,就是激光光束一定要垂直于板平面,因此只能测量板表面的垂向振动。
4.近场声全息方法
近场声全息(Near-field Acoustic Holography,NAH)是用声全息技术在近场识别声源特征的一种方法。近场是指离声源最高频率对应波长的12倍距离的区域。在近场,声波非常复杂,既不是球面波也不是平面波,声压级和距离之间没有确定的关系。比如,我们对声源最感兴趣的频率是5000Hz,近场就是离声源714cm的区域。
近场声全息方法的关键是用一系列传声器组成传声器阵列,在声源面的近场构建一个全息测量面,如图3-37所示,通过测量面和声源面之间的关系来识别声源特征。近场声全息方法利用测量面上的声压是声源面上声压和格林函数的卷积关系,将二维傅里叶变换用于亥姆霍兹方程,实现空间域和空间波数域快速变换计算,重新构建声源面的声场,得到物体表面声压分布,最后用照片的形式显示出来。
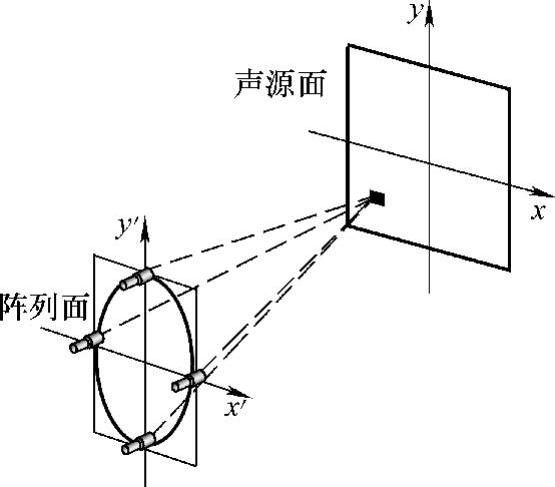
图3-37 声源面和传声器阵列测量面
传声器阵列上横向和纵向有规则地布置了许多传声器。阵列设计包括两个方面:一是阵列大小;二是传声器之间的距离。
阵列大小应该与被测部件的大小相当,否则会遗漏一部分被测量物体,同时阵列大小还决定了最低分析频率。当被测物体尺寸大于传声器阵列时,可以分批测量,但是前提是物体的运行状态应该是稳态的。假如物体的运动状况不是稳态的,比如声音随着转速变化(如发动机加速声音),或者声音是脉冲信号(如关门声音),那么就一定要在同样的运行工况下多次测量。
传声器之间的距离决定了最高分析频率以及对声源的分辨率。传声器之间的距离越近,分析频率越高,对声源的识别精度越高。但是它们也不能太靠近,否则声场会相互干扰。
近场声全息方法可以测量复杂结构表面的声音和振动,而且在整个宽频带内精度都非常高,因此它被广泛地应用在汽车声源识别、定位和贡献源分析。近场声全息方法主要用来测量中低频噪声。图3-38显示车身近场声全息的测试图。它可以用于车身板结构声辐射识别和贡献源分析。图3-39所示为某个车身在192 Hz下的声源分布。由图可知,后视镜、A柱、后三角窗处噪声大。
虽然近场声全息具有识别声源的强大功能,但是也存在缺陷。首先它要求传声器阵列面大小与被测物体一样,尽管对大尺寸物体可以分批测量,但是多次测量会带来误差,特别是对非稳态工况。第二个缺陷是分析高频率时,需要布置密集的传声器,但是在日常测试工作中,没有那么多传声器和测试通道。另外,过度密集的传声器布置还会影响声场。波束形成方法可以克服这些缺陷。

图3-38 车身近场声全息的测试图(见彩插)

图3-39 某个车身在192Hz的声源 分布(见彩插)
5.波束形成方法
波束形成(Beamforming)技术是一种在远场识别声源的技术。在声场中,质点振动速度和声压存在平面波的简单关系的区域称远场。在远场,可以认为声波是以平面波的形式传播。
在远场放置一个传声器阵列,声源的声波以平面波或者球面波的形式传递到阵列的每个传声器上。声源与每个传声器的距离和相对位置不同,每个传声器接收到声波的时间不同。利用这种位置差异和时间差异,经过一定的计算,增加选定方向上的信号而衰弱其他方向的信号,在传声器阵列中重建噪声信号,从而识别声源。最简单和最常用的计算方法是延迟求和,它是通过延时、加权、求和等计算得到声源的主瓣(最大值)以及旁瓣。
阵列的构建影响到识别精度。阵列具有不同的指向性,不同的阵列对识别结果影响大。阵列分平面阵列和空间阵列。平面阵列包括一字阵列、十字阵列、矩形网格阵列、圆形阵列、圆环形阵列,如图3-40所示。空间阵列有矩形体阵列、菱形阵列、球形阵列等,其中球形阵列最普遍,如图3-41所示。阵列形状和传声器布置可以是规则的,如矩形阵列、圆形阵列;也可以是不规则的,如随机阵列、阿基米德螺旋形阵列。规则阵列会产生空间混叠问题,产生虚影现象,影响识别精度。设计良好的不规则阵列的识别精度高于规则阵列,但是这种阵列设计比较难,需要大量的经验和数据积累。
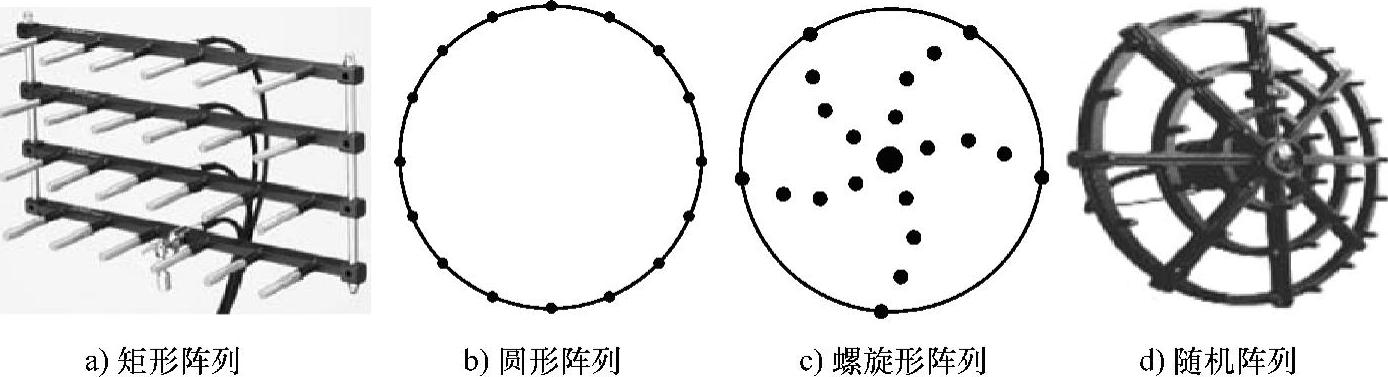
图3-40 几种平面阵列
波束形成法是将阵列放置在远场,因此它特别适合于不能靠近物体的噪声测量,比如在风洞里测量车外风噪。声波的传递与阵列大小没有关系,因此它可以用来测量大尺寸物体的噪声,比如用一个直径只有0.5 m的圆形阵列就可以测量整车的噪声。波束形成法可以用于稳态和非稳态测试。
但是波束形成方法也有缺陷。它的原理中假设了声源是由互不相干的点声源组成,而且分辨率取决于阵列与声源的距离、阵列尺寸以及声波波长,因此它对低频声源识别的精度低。这种技术只适合用于识别中高频噪声,主要是1000Hz以上的信号。
波束形成方法在汽车领域得到了广泛应用,市场上有各种各样的声像仪(或者叫声学照相机)。类似于近场声全息测量,波束形成法中的传声器同时记录信号,可以很快地以图像的形式将噪声呈现出来。车外噪声测量采用平面阵列,车内噪声可以采用球形阵列。图3-42为用球形阵列测量某款车内噪声的照片。图3-43显示的是车内噪声测试结果。

图3-41 球形阵列

图3-42 用球形阵列测量某款车 内噪声的照片(见彩插)
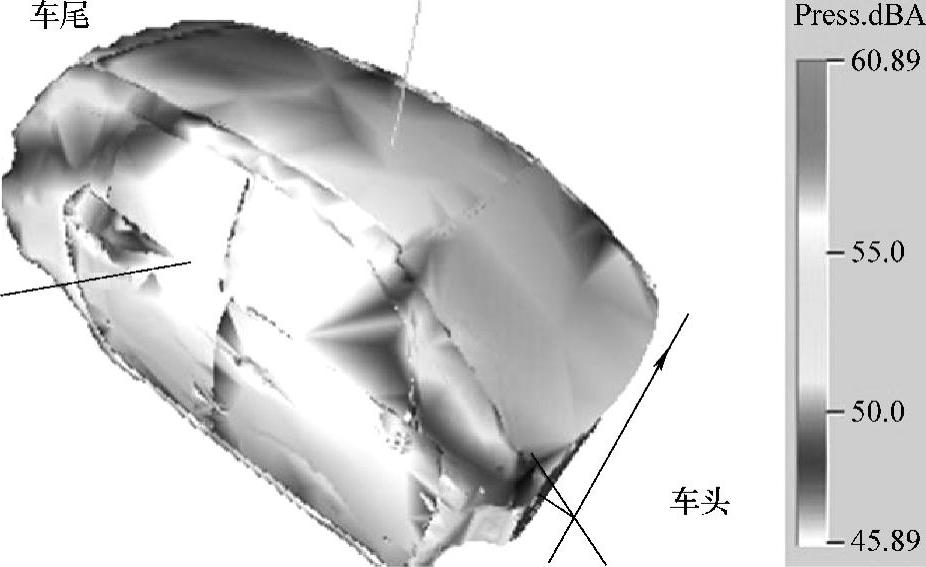
图3-43 用球形阵列测量的车内噪声(见彩插)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。