



【摘要】:在低车速下行驶,步进电动机调节的路面等级带宽大;在高车速下行驶,步进电动机调节的路面等级带宽小。图11-14~图11-16所示分别为汽车在路面等级B、C、D路面上行驶时,步进电动机转角随行驶车速变化的曲线。
根据最佳阻尼比数学模型ξ=ξ(Gq,v),再结合步进电动机转角与阻尼比的关系θ=θ(ξ),可得步进电动机转角与车速路况的关系θ=θ(Gq,v)。
图11-11~图11-13所示为车速v分别等于60km/h、80km/h和100km/h时,步进电动机转角随行驶路况变化的曲线。由分析可知,同一车速下,行驶在良好路面上时,可控减振器在舒适性最佳阻尼比下工作,步进电动机仅转动较小的角度;行驶在较差路面上时,可控减振器在安全性最佳阻尼比下工作,步进电动机转动较大的度数;随着路面状况持续变差,步进电动机转角逐渐增大。在低车速下行驶,步进电动机调节的路面等级带宽大;在高车速下行驶,步进电动机调节的路面等级带宽小。
图11-14~图11-16所示分别为汽车在路面等级B、C、D路面上行驶时,步进电动机转角随行驶车速变化的曲线。
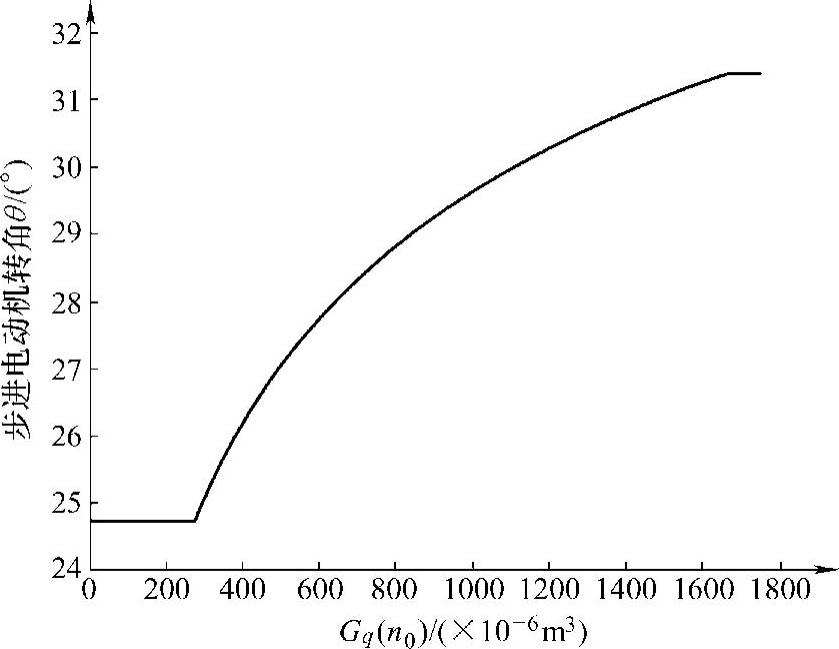
图11-11 车速60km/h时步进电动机转角随路况的变化曲线
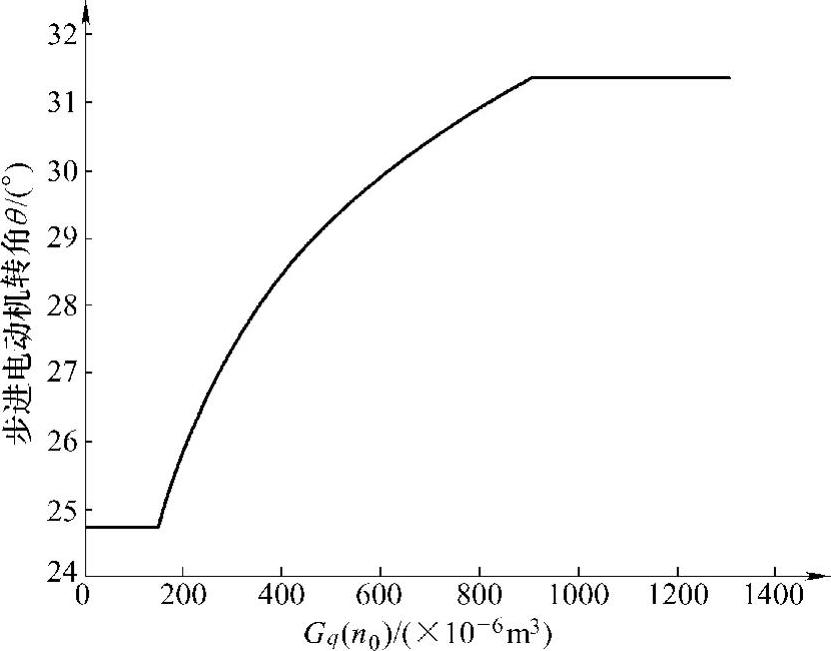
图11-12 车速为80km/h时步进电动机转角随路况的变化曲线(https://www.xing528.com)
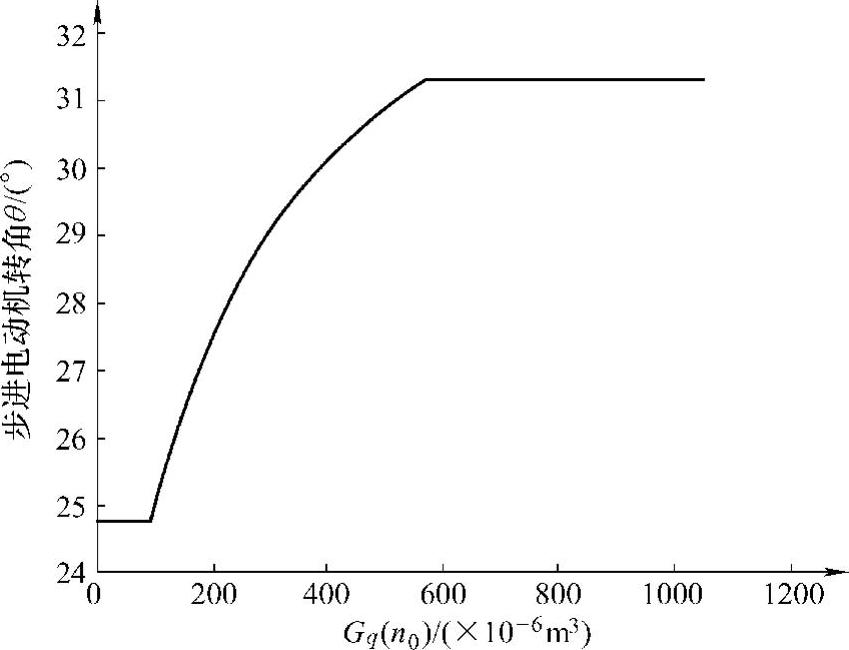
图11-13 车速为100km/h时步进电动机转角随路况的变化曲线
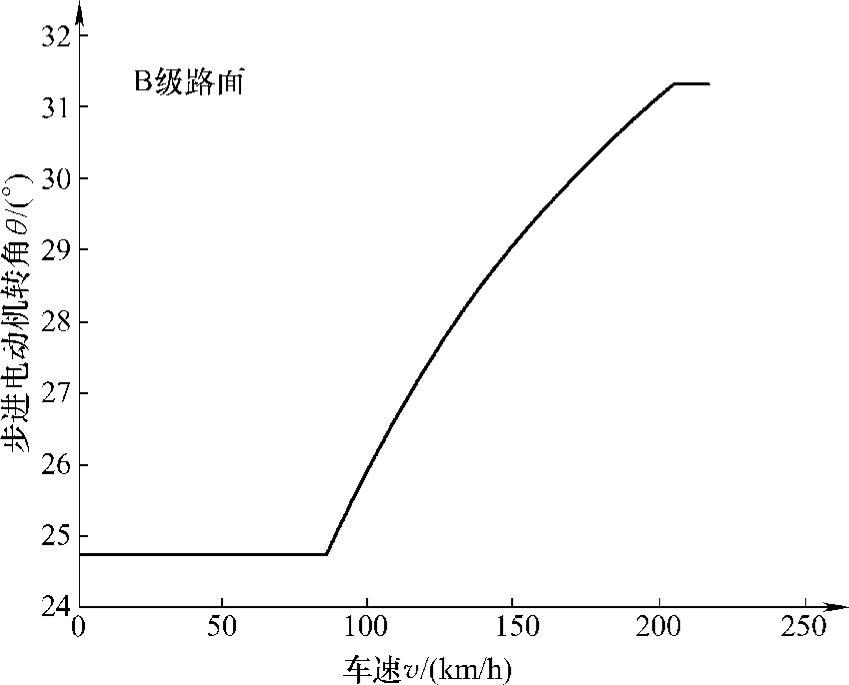
图11-14 B级路面时步进电动机 转角随车速的变化曲线
由上述分析可知,在同一路面上行驶,若车速较低时,则可控减振器在舒适性最佳阻尼比下工作,步进电动机转动较小的度数;车速较大时,可控减振器在安全性最佳阻尼比下工作,步进电动机转动较大的度数;随着车速的提高,步进电动机转角逐渐增大。在良好路面上行驶时,步进电动机调节的速度带宽大;在差路面上行驶时,步进电动机调节的速度带宽小。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。