



将振动微分方程组式(4-1)中的两个式子相加,可得

对式(4-17)进行拉氏变换,可得

由于车身振动加速度 、车轮动载荷Fd和悬架弹簧动挠度δd对路面激励速度
、车轮动载荷Fd和悬架弹簧动挠度δd对路面激励速度 的传递函数分别为
的传递函数分别为 、
、 和
和 。因此,对式(4-18)进行恒等变换,可得
。因此,对式(4-18)进行恒等变换,可得
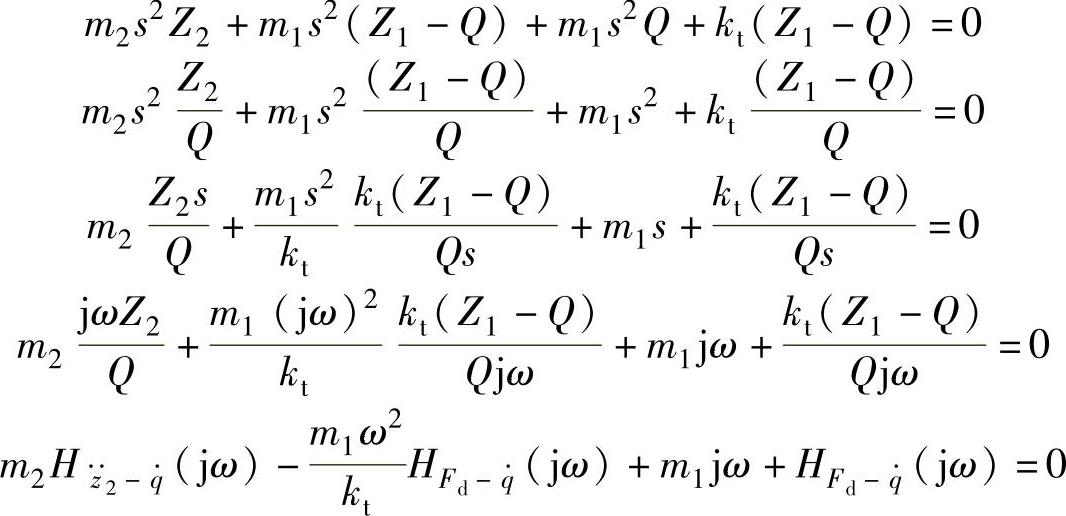
即 式(4-19)即为车身振动加速度对路面速度激励传递函数
式(4-19)即为车身振动加速度对路面速度激励传递函数 与车轮动载对路面速度激励传递函数
与车轮动载对路面速度激励传递函数 之间的关系式。同理,对式(4-18)进行相应的恒等变换,可分别得到:车身振动加速度对路面速度激励传递函数
之间的关系式。同理,对式(4-18)进行相应的恒等变换,可分别得到:车身振动加速度对路面速度激励传递函数 与悬架动挠度对路面速度激励传递函数
与悬架动挠度对路面速度激励传递函数 之间的关系式,以及悬架动挠度对路面速度激励传递函数
之间的关系式,以及悬架动挠度对路面速度激励传递函数 与车轮动载对路面速度激励传递函数
与车轮动载对路面速度激励传递函数 之间的关系式。
之间的关系式。
车身加速度、车轮动载荷和悬架动挠度的频响函数是相互影响和相互制约的,在某较宽的频带内改善三个传递函数中的任一个或两个,会同时造成对另外其他频响函数的恶劣影响。因此,在建立悬架性能目标函数时,若以车身加速度、车轮动载荷和悬架动挠度中的两个建立综合目标函数,则必须以悬架动挠度作为约束条件。
半主动悬架系统的功能是使减振器阻尼能根据不同路况进行调节,在舒适性和安全性之间进行协调,实现更好的折中。因此在求解悬架系统最佳阻尼时,应根据车身加速度和车轮动载荷建立目标函数,而约束条件则限制悬架动挠度。在车辆的实际行驶过程中,道路谱和车速在较小的一段时间内是相对稳定的,即道路谱和车速分段稳定,故利用均方根值建立目标函数,考虑的是整个频域上的平均值。因此,建立量纲为1的最佳阻尼比优化设计目标函数为

约束条件为
其中,α为加权系数;[δd]为悬架动挠度限位行程。
把式(4-9)、式(4-11)代入优化设计目标函数式(4-20),得
J(ξ)=F(ξ,Gq,v,rk,rm)(4-21)对优化设计目标函数求ξ的偏导数,即令 ,可得基于安全性和舒适性统一的悬架最佳阻尼比ξ*,因此,由约束条件和阻尼比优化方法可求得
,可得基于安全性和舒适性统一的悬架最佳阻尼比ξ*,因此,由约束条件和阻尼比优化方法可求得
 (https://www.xing528.com)
(https://www.xing528.com)
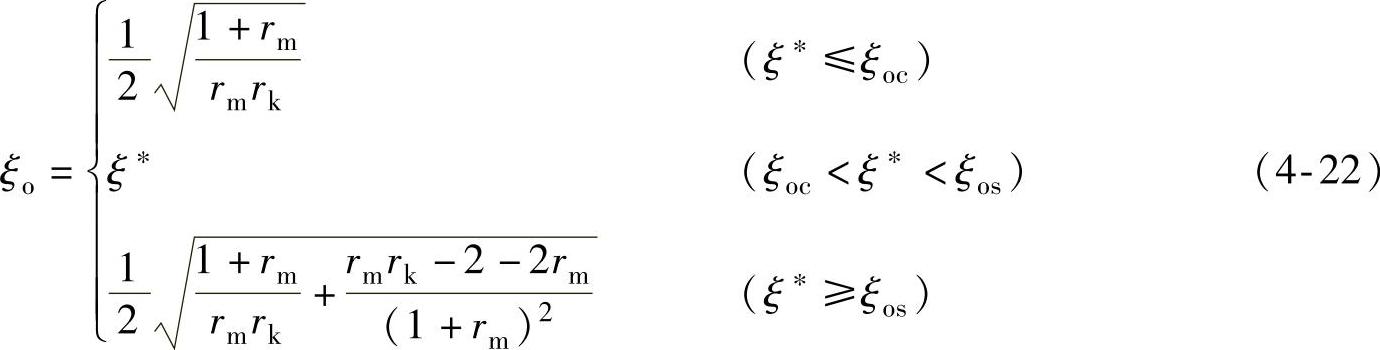
由于舒适性和安全性是一个不可分割的整体,故0≤α≤1;而α取0与1之间的任何数值时,都有ξoc≤ξ*≤ξos,故式(4-22)化为

只要测得行驶车速和路面不平度输入,就可根据式(4-23)求得最佳阻尼比,从而使悬架处于最佳减振状态。为了控制律实现的简易性,可以把车速与路面不平度的激励谱作为一个输入信号,采用加速度传感器采集车身垂直加速度信号 ,利用式(4-9)进行反求激励输入信号,即路面不平度和车速的乘积为
,利用式(4-9)进行反求激励输入信号,即路面不平度和车速的乘积为

式中,rm、rk和ω0对特定悬架系统均为已知;ξ为悬架系统当前阻尼比。
例如,某车辆悬架质量比rm=10、刚度比rk=9,由式(4-23),可求得半主动悬架阻尼比随车身垂直加速度的变化曲线,即悬架阻尼比最佳控制律曲线,如图4-4所示。车身加速度是路谱激励下的反应,因此可根据车身加速度调节最佳阻尼比,使舒适性和安全性达到最佳折中状态。
当车速为20km/h时,行驶在不同路况情况下的车辆悬架最佳阻尼比ξo随路况的变化曲线如图4-5所示。
当行驶在C级路况情况下,车辆在不同速度情况下的车辆悬架最佳阻尼比ξo随车速的变化曲线,如图4-6所示。
由图4-4~图4-6可知,汽车在良好路面上行驶时,车身垂直加速度较小,为了保证乘坐舒适性,悬架阻尼比调节为舒适性最佳阻尼比ξoc=0.175;在较差路面上行驶时,垂直加速度较大,为了保证行驶安全性,悬架阻尼比调节为安全性最佳阻尼比ξos=0.4136;在中等路面上行驶时,在保证悬架动挠度的前提下,即在不超过悬架限位行程的前提下调节阻尼比,可得到较好的舒适性,同时又不失安全性,使安全性与舒适性达到最好的折中状态。在相同路面行驶时,在较小速度情况下,可选择舒适性最佳阻尼比ξoc=0.175;当大于一定速度时,可选择安全性最佳阻尼比ξos=0.4136。当在一定车速范围内时,随着车速的增加,阻尼比逐渐增大。因此,车辆根据变化的激励不断地调整悬架阻尼比,就能保证悬架在各种路面条件下均能获得最佳的减振性能。
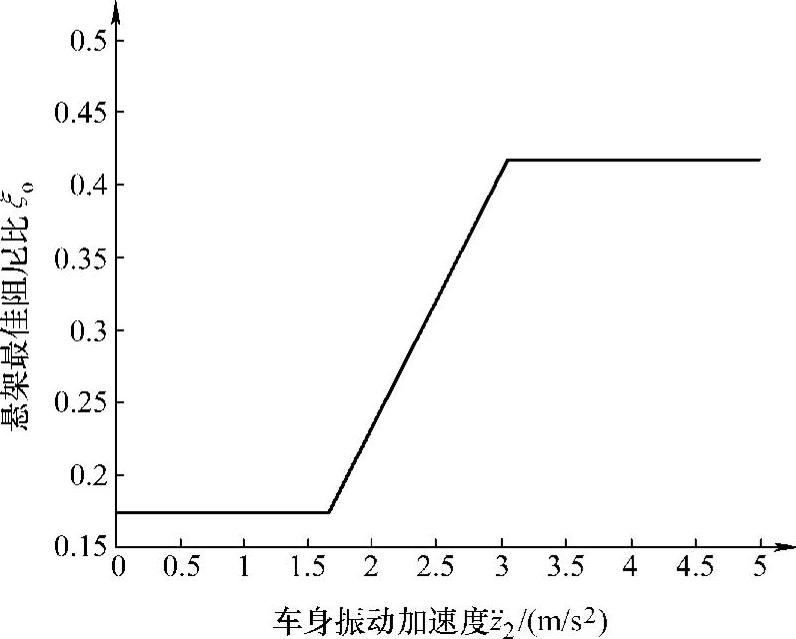
图4-4 悬架最佳阻尼比随车身振动加速度的变化曲线
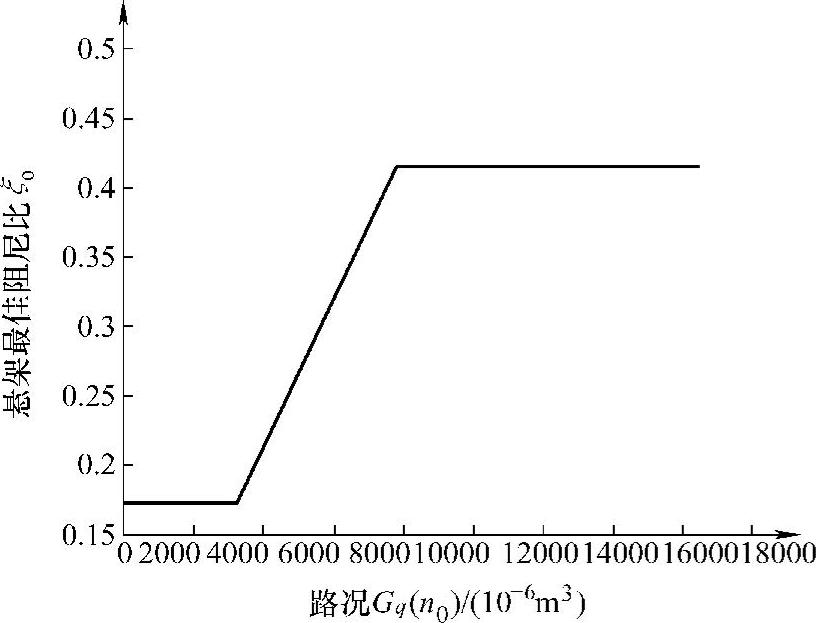
图4-5 悬架最佳阻尼比随路况的变化曲线
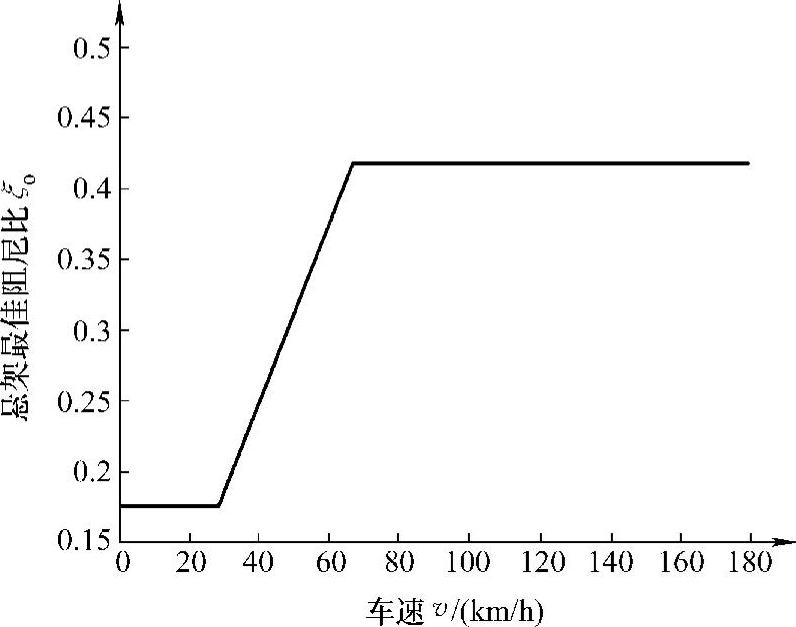
图4-6 悬架最佳阻尼比随车速的变化曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。