



对式(2-8),通常关心其稳态随机响应,它取决于路面不平度函数随机激励q(x)和系统的频率响应特性函数H(ω)。由上可知,系统频率响应函数H(ω)z-q为系统的振动响应z的傅里叶变换与激励q的傅里叶变换之比,即

式中,Z(ω)为响应z(t)的傅里叶变换;Q(ω)为激励q(t)的傅里叶变换。
对式(2-8)进行傅里叶变换,可得单质量车身在路面激励下响应的频响函数为

式中, 为阻尼比;λ为频率比,
为阻尼比;λ为频率比, ;ω为路面激励的圆频率;
;ω为路面激励的圆频率; 为系统固有圆频率。
为系统固有圆频率。
由式(2-43)得为单质量车身在路面激励下的幅频特性和相频特性。
幅频特性为

相频特性为

汽车在具有一定幅值的正弦波路面上行驶,即路面激励为
q(t)=asin ωt
则单质量车身在路面激励下的响应为

路面激励q(t)=asin ωt为正弦,所以系统的实际响应为
 (https://www.xing528.com)
(https://www.xing528.com)
式中, 为幅值Z,即路面激励响应的幅值为
为幅值Z,即路面激励响应的幅值为

如果路面激励以速度 =bsin ωt来表达,用上面同样的推导方法可得
=bsin ωt来表达,用上面同样的推导方法可得

若以加速度 来表达,则有
来表达,则有

由H(ω)z-q可以得到单质量系统的幅频特性曲线,如图2-10所示。
由频响函数式(2-44)和图2-10可知
1)当频率比λ=1时,系统出现共振,幅频特性达到最大,即共振时的幅值
2)在低频段(0≤λ≤0.75),H(ω)z-q略大于1,不呈现明显的动态特性,阻尼比对低频段的影响不大。
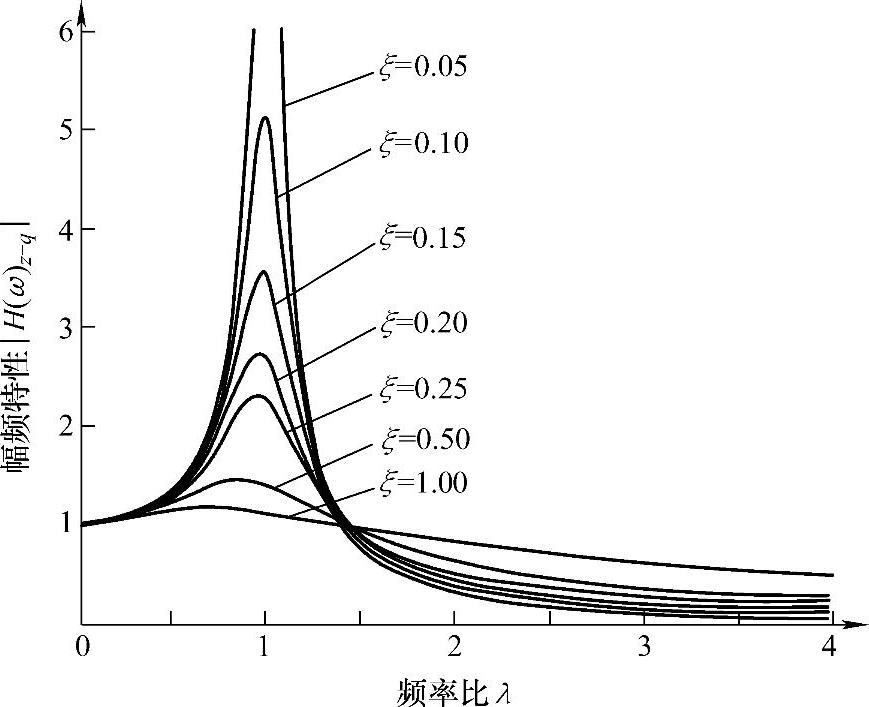
图2-10 单质量系统的幅频特性曲线
3)在共振段(0.75<λ< ),H(ω)z-q出现峰值,将输入激励放大,增大阻尼比ξ,可使共振峰值明显降低。
),H(ω)z-q出现峰值,将输入激励放大,增大阻尼比ξ,可使共振峰值明显降低。
4)在高频段( ),当
),当 时,
时,
H(ω)z-q=1,系统响应与阻尼比ξ无关;当 时,H(ω)z-q<1,对输入位移有衰减作用,且阻尼比减小对减振有利。
时,H(ω)z-q<1,对输入位移有衰减作用,且阻尼比减小对减振有利。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。