



由于阻尼会使自由振动逐渐衰减,最后达到完全停止。工程上一些能持续下去的振动必定有外加能源,以弥补阻尼所消耗的能量,使系统的振动不会衰减。因此,工程上多采用强迫振动的响应。
若简谐激振力f(t)=F0sinωt,则根据牛顿第二定律,可得单质量振动系统在简谐激振力f(t)=F0sinωt作用下的振动微分方程,可表示为

式(2-19)可写为

式中, ,
, ;
; 。
。
振动微分方程式(2-20)的解包括两部分:齐次方程的通解z1和方程的特解z2,即
z=z1+z2
由2.2.2节可知,在弱阻尼(ξ<1)的情况下,有阻尼自由振动齐次方程的解z1为

式(2-21)代表的是一种衰减振动,只在振动开始的一段时间内才有意义,故为瞬态振动。在一般情况下实际工程意义不大,可以不予考虑。
振动微分方程式(2-20)的特解z2,代表系统在简谐激振下所产生的强迫振动,它是一种持续的等幅振动,故为稳态振动。设特解z2为
z2=Zsin(ωt-ψ) (2-22)
式中,Z为振动响应的幅值;ω为激振力圆频率,也是振动响应的圆频率;ψ为响应滞后于激励的相位差。
又因为


将式(2-22)~式(2-24)代入微分方程(2-20),可得
-ω2Zsin(ωt-ψ)+2ξpωZcos(ωt-ψ)+p2Zsin(ωt-ψ)=Fsin ωt(2-25)
利用三角函数关系得
Fsin ωt=Fsin[(ωt-ψ)+ψ]=Fcos ψsin(ωt-ψ)+Fsin ψcos(ωt-ψ)(2-26)
比较式(2-26)和式(2-25),由于对任何瞬时t都成立,故sin(ωt-ψ)和cos(ωt-ψ)前的系数必须分别相等,即(https://www.xing528.com)
(p2-ω2)Z=Fcos ψ
2ξpωZ=Fsin ψ
因此,可得
式中, 为频率比;
为频率比; ,为系统的最大静位移。
,为系统的最大静位移。
因此,强迫振动的稳态解为

由上述强迫振动解可见:在简谐激振力作用下,强迫振动响应为也简谐振动,其频率与激振频率ω相同,但相位角滞后ψ,这是由于阻尼存在的关系。振幅Z与相位差ψ都只与系统固有特性及激振力的性质有关,而与初始条件无关。
由式(2-29)可得Z与Z0之比β,β称为放大因子,为

放大因子β代表稳态振幅X与激振力幅F0作用于弹簧上的静位移Z0之比。β值不仅随λ而变,而且还随ξ值而变。
在不同的阻尼比ξ的情况下,放大因子β与频率比λ的关系以及相位角ψ与λ的关系,如图2-8和图2-9所示。其中,图2-8所示为幅频响应曲线,而图2-9所示为相频响应曲线。

图2-8 幅频响应曲线
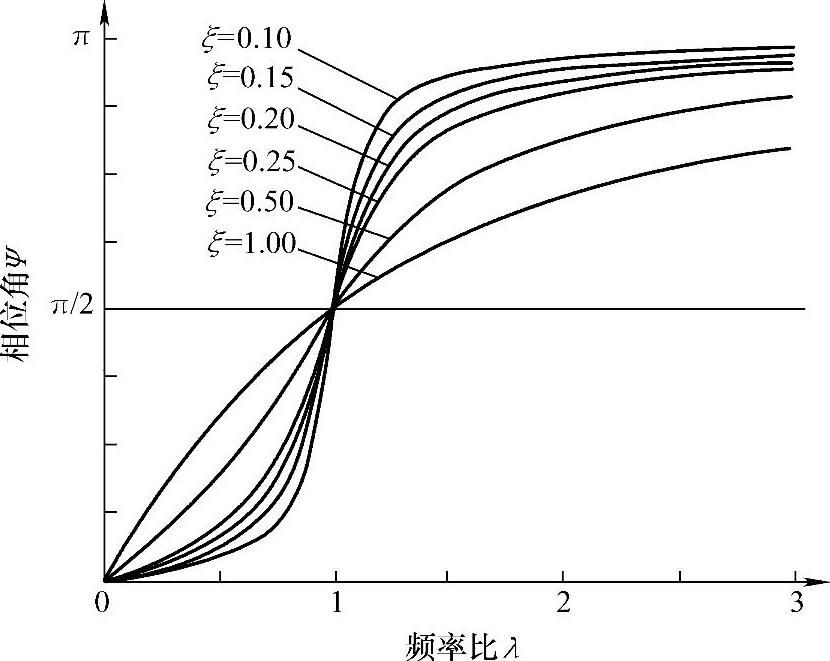
图2-9 相频响应曲线
1)当λ≪1,即激振频率ω远小于系统的固有频率p时,无论阻尼大小如何,β接近于1,即振幅近似等于激振力幅值F0作用下的静变形X0。故在低频区内,振幅X主要由弹簧刚度控制。此时,相位差ψ≈0,即位移与激振力接近于同相位。
2)当λ≫1,即激振频率ω远大于系统的固有频率p时,β趋近于0。因为激振力方向改变太快,振动物体由于惯性来不及跟随,几乎停止不动。故在高频区内,振幅X主要决定于系统的惯性。这一特性正是隔振和惯性传感器的理论依据。相位差ψ≈π,即在高频范围内位移与激振力接近于反相位。
3)当λ≈1时,即ω接近p,振幅Z急剧增加,β趋向βmax,这种现象称为共振。严格地讲,βmax发生在 处,但通常ξ2≪1,故ω=p时系统发生共振。由式(2-18)可以看出,振幅Z达到最大值
处,但通常ξ2≪1,故ω=p时系统发生共振。由式(2-18)可以看出,振幅Z达到最大值 时,由式(2-28)得
时,由式(2-28)得 。
。
可见在共振时,振幅最大值Zmax与阻尼比ξ的值有关,ξ越小,则Zmax将越大;在ξ→0时,Zmax可达到无穷大。但共振时的ψ值与阻尼比ξ的值无关,不论ξ为何值,共振时的ψ总是 ,这是共振的一个重要特征。从分析幅频响应与相频响应所引出的共振现象,是传统的共振试验法测定系统固有频率的理论基础。
,这是共振的一个重要特征。从分析幅频响应与相频响应所引出的共振现象,是传统的共振试验法测定系统固有频率的理论基础。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。