



电梯的电力拖动系统对电梯的启动加速、稳速运行、制动减速起着控制作用。拖动系统的优劣直接影响电梯的启动和制动加速度、平层精度、乘坐舒适性等指标。在19世纪中叶以前,直流拖动是电梯的唯一拖动方式,到20世纪初,交流电力拖动才开始在电梯上得到应用。
目前用于电梯的电力拖动系统主要有如下几类:
(1)直流拖动系统 直流电动机具有调速平滑,调速范围大的特点,因此直流电梯具有速度快、舒适感好、平层准确度高的优点。但它的缺点也不少,如机组体积大、耗能高、维护工作量大、造价高、故障较多。随着变频变压调速技术的发展,目前直流拖动已很少选用。
(2)交流变极调速系统 变极调速就是改变交流感应电动机定子绕组的磁场极数,以改变磁场同步转速来达到调速的目的。由电动机学原理可知,三相异步电动机的转速可由式(3-9)表达:
ne=60f(1-s)/p (3-9)
式中 ne——电动机转速(r/min);
f——电源的频率,我国市电工频为50Hz;
p——定子绕组的磁极对数;
s——转差率,也称之为滑差。
从式(3-9)可知,改变磁极对数p就可以改变转速。以交流双速电梯为例,其电动机定子内具有两个不同极对数的绕组,一般为4极/16极或6极/24极,也有少数4极/24极和6极/36极。电动机极数少的绕组称为快速绕组,极数多的称为慢速绕组。变极调速是一种有级调速,调速范围不大,因为过多的增加电动机的极数,就会显著地增大电动机的外形尺寸。从图3-70可以看出,三相交流感应电动机定子内具有两个不同极对数的绕组(分别为6极和24极)。快速绕组(6极)作为启动和稳速之用,而慢速绕组作为制动减速和慢速平层停车用。为了限制启动电流,以减小对电网电压波动的影响,在启动时一般按时间原则,串电阻、电抗一级加速或二级加速;减速制动是在低速绕组中按时间原则进行二级或三级再生发电制动减速,以慢速绕组(24极)进行低速稳定运行直至平层停车。该系统大多采用开环方式控制,线路比较简单,造价较低,因此,被广泛用在电梯上。但由于乘坐舒适感较差,此种系统一般只应用于额定速度不大于1m/s的货梯。
(3)交流调压调速系统 由于大规模集成电路和计算机技术的发展,使交流调压调速拖动系统在电梯中得到了广泛应用。该系统采用晶闸管闭路调速,其制动减速可采用涡流制动、能耗制动、反接制动等方式,使得所控制的电梯乘坐舒适感好,平层准确度高,明显优于交流双速拖动系统,多用于速度2.0m/s以下的电梯。但随着调速技术和大功率器件的发展,也已被变频变压调速系统所替代。
(4)变频变压调速系统 变频调速是通过改变异步电动机供电电源的频率而调节电动机的同步转速,也就是改变施加于电动机进线端的电压和电源频率来调节电动机转速。目前,交流可变电压可变频率(VVVF)控制技术得到了迅速发展。利用矢量变换控制的变频变压系统的电梯速度可达12.5m/s,其调速性能已达到直流电动机的水平,且具有节能、效率高、驱动控制设备体积小、重量轻和乘坐舒适感好等优点。目前,变频调速已完全取代了直流拖动和交流调压调速拖动。交流变频调压调速电梯的主驱动回路如图3-71所示。
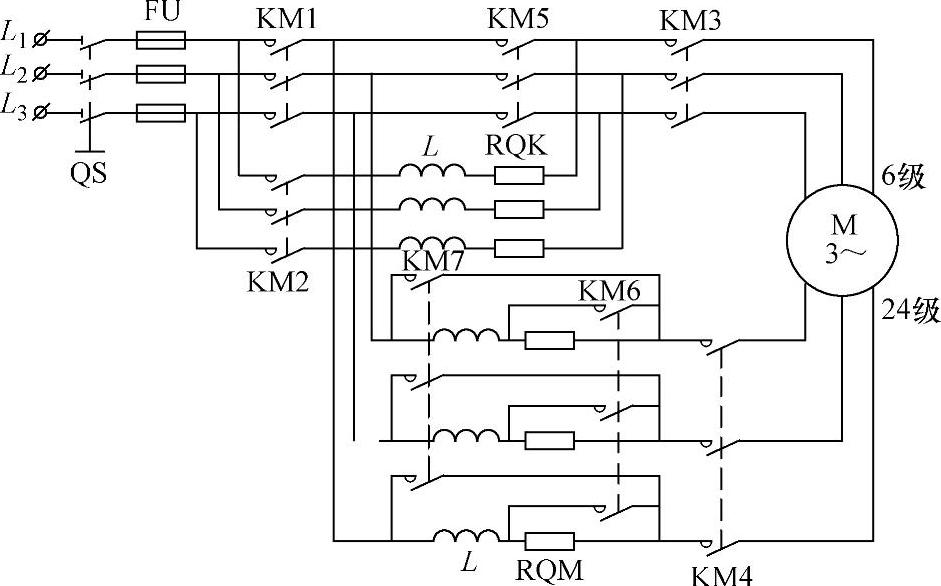
图3-70 交流双速电梯的主驱动系统的结构原理图
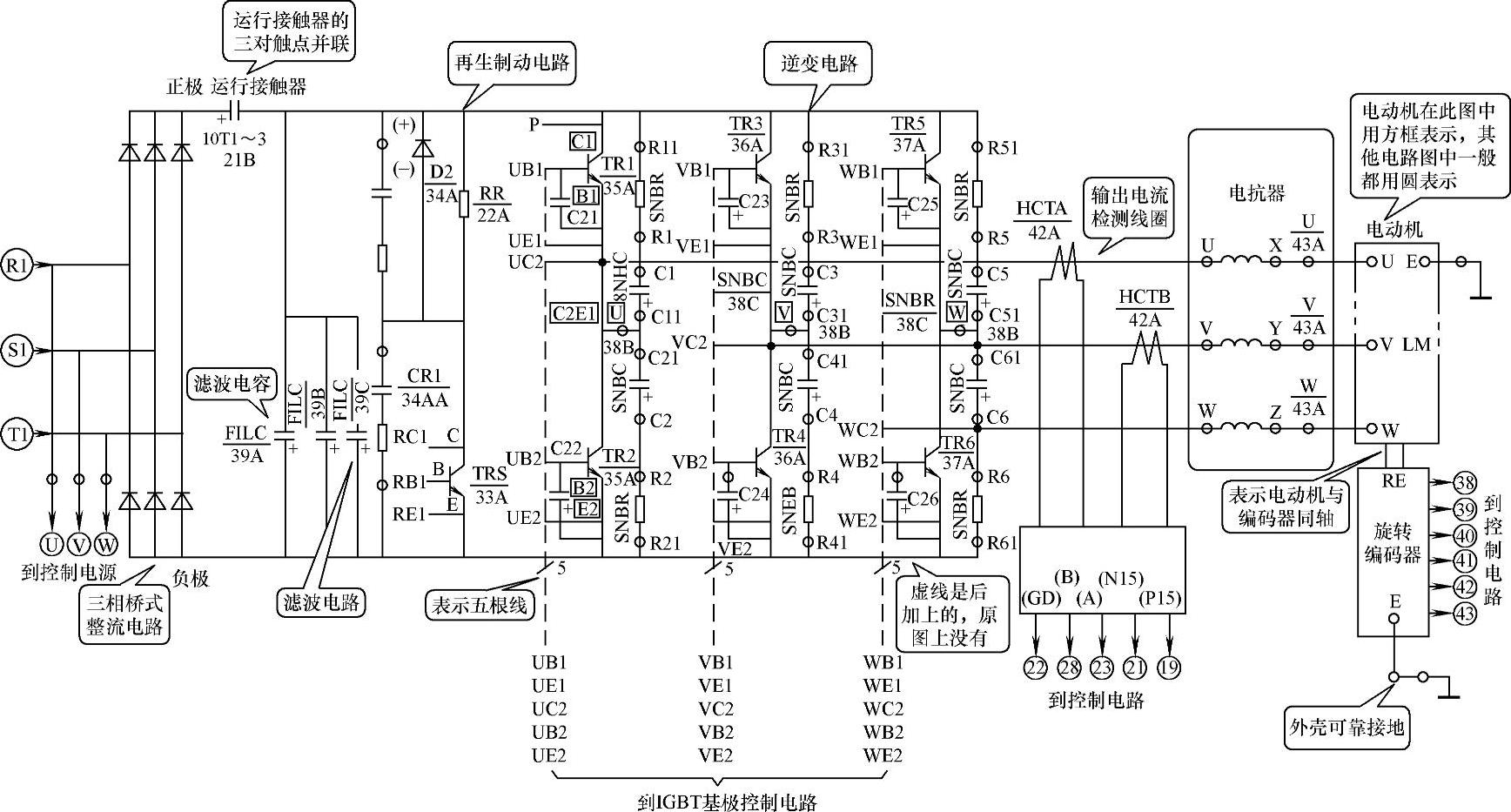
图3-71 交流变频调压调速电梯的主驱动回路
1)HCTA/HCTB。输出电流检测线圈,一般采用霍尔元件构成,其原理是利用霍尔效应,检测电路中逆变后输出的电流值,得到的电压值输入到相关控制电路,由进行转矩电流控制的微处理器(一般现代采用DSP数字信号发生器,一种专用的、高速的计算机)进行处理,从而控制逆变电路中大功率晶体管的导通角,改变输出电流,这样组成了该电路中电流闭环负反馈系统。霍尔元件相比于普通磁互感器,具有结构牢固、体积小、重量轻、寿命长、安装方便、功耗小、频率高(可达1MHz)、耐振动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀、精度高、线性度好、工作温度范围宽(可达-55~150℃)等特点。
2)电抗器。当逆变器器件采用GTR等开关频率比较低的器件(一般5kHz以下)时,电抗器的作用就是消除由此产生的高次谐波引起的噪声和振动。在大功率器件发展到开关频率高达15kHz的IGBT、IPM后,电抗器已经不需要了。
3)旋转编码器RE(ROTARY ENCODER),又称为脉冲发生器PG(PULSE GENERA-TOR),在电梯主电路中起着相当于人体中神经系统的作用。典型的旋转编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成,一般按照安装方式分空心圆筒式和实心圆筒式等外形,按照产生脉冲的方式不同电梯中使用的有增量式和绝对值式两种。以前者为多,后者在技术上有一定优势,但由于成本等原因应用不广。旋转编码器和微处理器等也组成了电梯的速度闭环负反馈系统。
①检测电梯轿厢位移,其公式为

式中 S——轿厢位移(m);(https://www.xing528.com)
D——曳引轮节圆直径(m);
I——曳引比,一般为1、2、3、4;
R——减速比;
N——旋转编码器码盘上固有的透光孔槽,一般为512、1024、2048、4096、8192等,其意义代表电动机旋转一周旋转编码器输出的脉冲数;
n——在电梯电路的高速计数单元中记录到的脉冲数。
从式(3-10)可以看出,只有n是变量,其余都是不变量,数值在出厂或调试中输入,也就是说,只要得到高速计数单元中记录到的脉冲数,就可以通过计算求到轿厢的位移。
②检测电梯速度由式(3-10)得到:
v=S/t (3-11)
式中 v——轿厢一段时间内的平均速度;
t——时间,由电梯电路内部时钟发生器产生,当时间足够短时,就是轿厢运行的瞬时速度。
③检测轿厢运行方向,或者说电动机的旋转方向。旋转编码器一般有两组脉冲,分别为A相、B相,两者波形完全相同,只是在空间上相差1/4周期即90°角度。定义A相超前B相90°为电动机正转,轿厢上升,实际检测到符合时,说明电梯上升,反之亦然。近年来,以稀土永磁同步电动机为基础的无齿轮曳引机应用非常多,大有取代以感应式异步电动机为基础的有齿曳引驱动的趋势。无齿同步曳引机取消了减速器环节,其电动机转速严格遵循式(3-12):
ne=60f/p (3-12)
永磁同步无齿轮曳引机与有齿驱动曳引机(蜗杆式、行星齿轮式、斜齿轮式)相比,具有以下优势:
a.体积小:重量轻。主要是减少了齿轮减速箱这一环节,这样使机房小,占地少,并降低了制造成本。
b.能耗低:由于没有减速箱,理论上传动效率可达到100%,与同功率异步电动机驱动的电梯相比,效率有一定程度提高。
c.噪声小:由于该电动机转速极低,约一、二百转每分钟,相对异步电动机的每分钟千转以上,噪声明显减小;另外,无齿轮传动,无接触式,也使噪声相对有齿传动要低10dB左右。
d.维护工作量低:由于无需更换或添加减速器润滑油,也无需防止润滑油外溢外漏,维护工作量极低。
e.绿色环保:由于没有齿轮箱油的污染,故具有绿色环保特性。
f.体积小型化:适用于无机房电梯上的应用,这是近几年来无机房电梯普遍采用的原因之一。
g.由于同步电动机能在低速度时输出大转矩,非常适合于电梯的负荷特点。
目前,电梯电力拖动以交流双速变极调速和变频变压调速为主,前者多用于货梯、后者多用于客梯。杂物电梯大多数情况速度小于0.4m/s常用不调速交流电动机拖动。从总的情况而言不仅是客梯,货梯和杂物电梯上也越来越多使用变频变压拖动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。