



空气调节自动控制系统中风机的控制原理图与前述章节中电动机的控制基本相同,一般采用双速电机直接起动或单速电机直接起动,容量较大的采用 -△起动,这里只介绍一般电动机控制原理图的另一种画法,供读者在识图中参考。图12-4是送风机
-△起动,这里只介绍一般电动机控制原理图的另一种画法,供读者在识图中参考。图12-4是送风机 -△控制原理图,当前一些较为先进的机组也有采用变频器起动的,第八章有详细介绍。表12-2是主要电气元件表,图中X□∶□(方框中为数字)是接线座的一种标注方法,表示接线座的序号,图中同一标注的序号是连接的。图中每一回路均用1、2…按顺序表示,并在序号的下面画出该回路接触器辅助接点或继电器接点在图中各个回路的分布情况,其中数字表示回路的序号,△表示外引接点,
-△控制原理图,当前一些较为先进的机组也有采用变频器起动的,第八章有详细介绍。表12-2是主要电气元件表,图中X□∶□(方框中为数字)是接线座的一种标注方法,表示接线座的序号,图中同一标注的序号是连接的。图中每一回路均用1、2…按顺序表示,并在序号的下面画出该回路接触器辅助接点或继电器接点在图中各个回路的分布情况,其中数字表示回路的序号,△表示外引接点, 各表示常开接点、常闭接点。这种画法为分析电路带来了极大的方便。
各表示常开接点、常闭接点。这种画法为分析电路带来了极大的方便。
1.手动运行(SA1打在手动运行/试验上)
(1)电源有电、熔断器FU完好,第一回路接通,绿色信号灯HG点亮,说明控制电源正常。
(2)第三回路中,KA3(11-12)、KH(81-82)、SB2(11-12)、KM3(11-12)KA2(21-22)均为常闭接点,接线座(X1∶7-X1∶8)是由仪表控制回路的盘管防冻信号引来的常闭接点,SA1-1手动运行中是闭合的,因此手按动SB1按钮时接触器KM1吸合,其主触点将主回路中电动机的W2、U2、V2接成星形。其辅助触点的分布使第四回路的常开点KM1(13-14)闭合自保,使第十回路的常闭点KM1(11-12)打开,实现KM1和KM3的互锁。
(3)第四回路中,KT(11-12)为常闭,中间继电器KA1得电吸合,其接点的分布使第七回路的常开点KA1(13-14)闭合,使第九回路的常闭点KA1(11-12)打开。这样第七回路的接触器KM2得电吸合,电动机接成星形全压起动。KM2接点的分布使第八回路的常开点KM2(13-14)闭合实现自保,使第五回路的常开点KM2(23-24)闭合,这样时间继电器KT得电吸合并开始延时。
(4)KT接点的分布使第四回路的KT(11-12)延时打开,这样KA1失电,其分布在第七回路的常开断开,因KM2(13-14)自保,不影响KM2的工作状态;分布在第九回路的常闭点KA1(11-12)复位闭合,KT分布在第九回路的KT(13-14)延时闭合,这样第九回路接为通路,中间继电器KA2得电吸合。
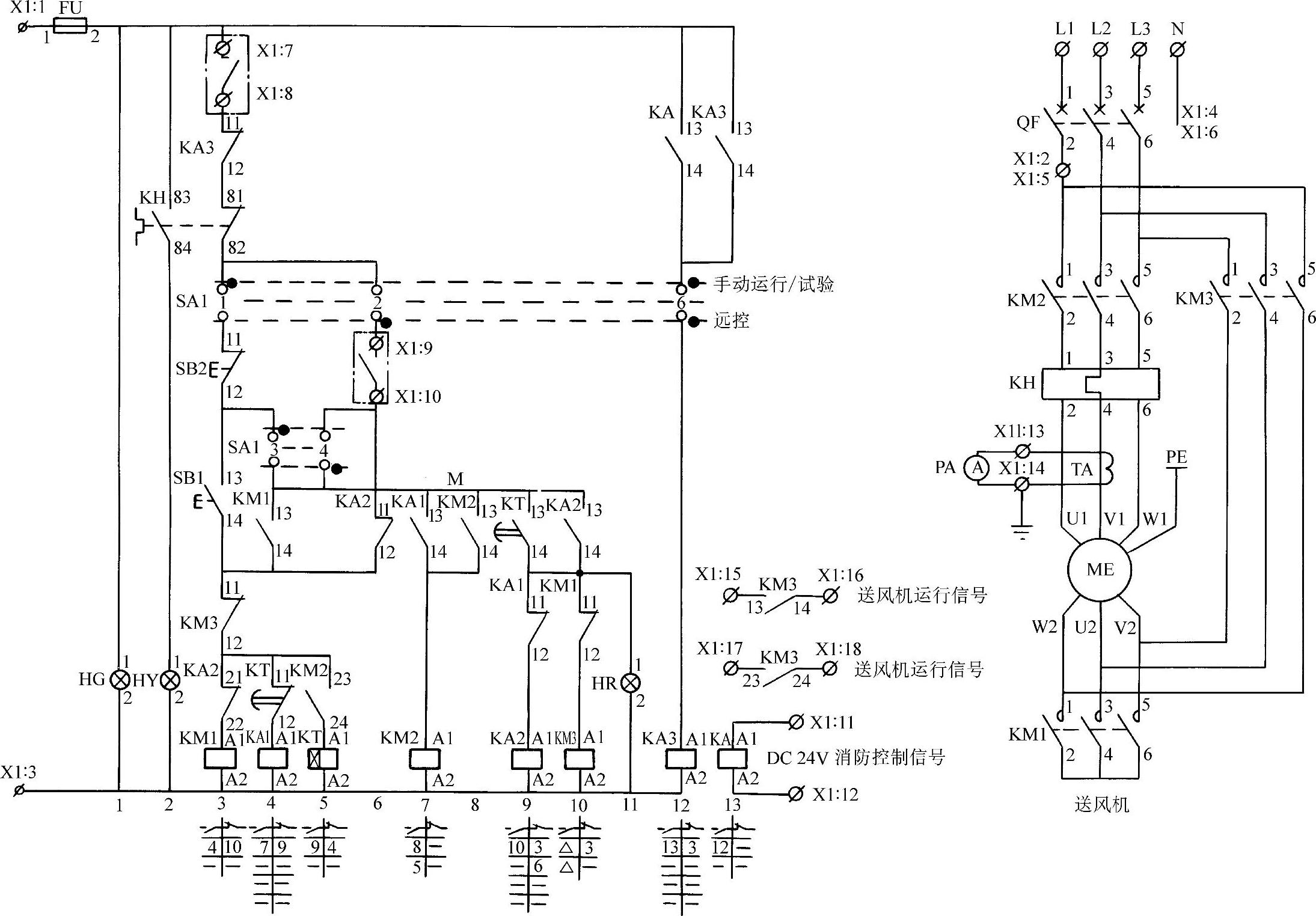
图12-4 送风机 -△起动控制原理图
-△起动控制原理图
注:1.图中二次电路中点划线框内接线座X1∶7和X1∶8连接的触头为来自仪表控制回路的盘管防冻信号,接线座X1∶9和X1∶10连接的触头为来自外电路的远控信号。
2.二次电路中接线座X1∶1和X1∶2、X1∶3和X1∶4短接。接线座X1∶5和X1∶6作为仪表控制回路电源引至仪表控制装置。
表12-2 主要电气元件表

注:未注明的二次电路元件额定电压均为AC220V。
(5)KA2接点的分布使第三回路的KA2(21-22)打开,KM1失电,其分布在第四回路的KM1(13-14)打开解除自保,第十回路的KM1(11-12)复位闭合为KM3得电作准备,这时电机星点被KM1解开。KA2在第六回路的接点KA2(11-12)打开,KA2在第十回路的常开点KA2(13-14)闭合,接通了接触器KM3,电动机完成了星形起动到三角形运行的过渡,这时电动机U1W2、V1U2、W1V2被KM3连接为三角形,起动完毕。(https://www.xing528.com)
(6)KM3辅助接点的分布使第三回路的常闭点KM3(11-12)打开,解除与KM1的互锁,两对常开点KM3(13-14)、KM3(23-24)闭合,发出风机运行的信号,供外引电路使用。同时KT失电,其第九回路的接点KT(13-14)打开,因KA2(13-14)闭合自保,不影响KM3和KA2的工作状态。
这时要注意到,三角形运行后KM2、KA2、KM3的得电回路是直接从SB2(12)-SA1(3)-KM2(13)-KA2(13)的连线M上得到的(图中M的标注是作者为了识读的讲述而画上的,原图无M字样)。另外,三角形运行后,KM2仍然吸合,这时图中KH和TA是接在电动机的相绕组上的,测得的电流是相电流,而不是线电流,在调整中应注意,这也是本电路的一个缺点。
(7)在风机正常运行中,若发生以下情况,电动机将失电停止运行。
1)操作SA1或SB2可将电动机手动停止,为运行人员提供了一旦发生事故可及时停车的便利。
2)运行过程中电动机过负荷时限超过热继电器KH的时限,KH则动作,其常闭点KH(81-82)打开切断控制电源的回路,接触器KM2、KM3失电,电动机自动停止;KH(83-84)闭合点亮事故信号灯HY。
3)当火灾发生时,第十三回路的信号继电器KA得电吸合,发出火警信号,分布在第十二回路的常开点KA(13-14)闭合,使KA3接通吸合,第十三回路的常开点KA3(13-14)闭合自保,第三回路的常闭KA3(11-12)打开切断控制回路电源,电动机停止。
4)空调系统盘管防冻信号继电器KA3吸合后,外引入接点接线座(X1∶7-X1∶8)打开,切断控制回路电源,电动机停止。
5)当电动机内部发生短路或主回路发生短路时,断路器QF自动跳闸,切断电动机电源,电动机停止。
2.远控运行(SA1打在远控上)
(1)同1-(1)。
(2)SA1(2)接通,远控信号由接线座(X1∶9-X1∶10)引入,电源经SA1(4)引入图中标注M的线段上,同时电源经X1∶10-KA2常闭点(11-12)-KM3常闭点(11-12)使KM1、KA1得电吸合,以下控制程序基本同手动控制的程序,可按1-(2)及以下的内容进行分析。
(3)停车同1。
最后说明一点,新风及空气处理机组自控系统采用的传感器、调节器、电动阀、压差开关、温度开关及各种电子器件等,均应以工程提供的施工图样中标注的型号为准,电路及工作方式应以其产品说明书为准,这里的图样及型号则是为了讲述的方便而选用的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。