



电动式电控动力转向系统,是一种直接依靠电动机提供辅助转矩的电动助力式转向系统。该系统仅需要控制电动机电流的方向和幅值,不需要复杂的控制机构。另外,该系统由于利用电控单元控制,为转向系统提供了较高的自由度,同时还降低了成本和重量。
(一)结构与工作原理
电动式电控动力转向系统主要由转矩传感器、车速传感器、电控单元、电动机和减速机构组成,如图7-15所示。
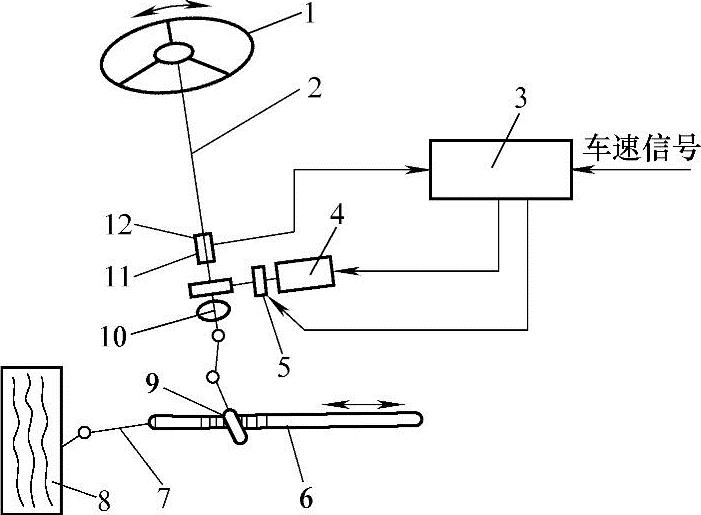
图7-15 电动式电控动力转向系统的组成
1—转向盘 2—输入轴 3—电控单元 4—电动机 5—电磁离合器 6—转向齿条 7—横拉杆 8—转向轮 9—转向器 10—扭杆 11—转向齿轮 12—转矩传感器
在操纵转向盘时,转矩传感器根据输入力的大小产生相应的电压信号,由此检测出操纵力的大小,同时根据车速传感器产生的脉冲信号又可测出车速,再控制电动机的电流,形成适当的转向助力。
1.转矩传感器
转矩传感器的作用是测量转向盘与转向器之间的相对转矩,以此作为电动助力的依据之一。
图7-16为无触点式转矩传感器的结构及工作原理图。在输出轴的极靴上分别绕有A、B、C、D四个线圈,转向盘处于中间位置(直驶)时,扭力杆的纵向对称面正好处于图示输出轴极靴AC、BD的对称面上。当在U、T两端加上连续的输入脉冲电压信号Ui时,由于通过每个极靴的磁通量相等,所以在V、W两端检测到的输出电压信号Uo=0转向时,由于扭力杆和输出轴极靴之间发生相对扭转变形,极靴A、D之间的磁阻增加,B、C之间的磁阻减少,各个极靴的磁通量发生变化,于是在V、W之间就出现了电位差。其电位差与扭力杆的扭转角和输入电压Ui成正比。
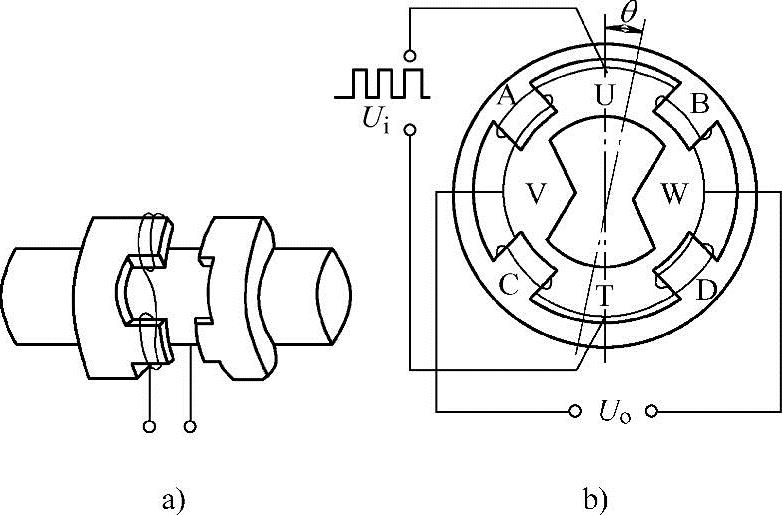
图7-16 无触点式转矩传感器的结构及工作原理图
a)结构 b)工作原理图
所以,通过测量V、W两端的电位差就可以测量出扭力杆的扭转角,于是也就知道转向盘施加的转矩。
图7-17为滑动可变电阻式转矩传感器的结构。它是将负载力矩引起的扭力杆角位移转换为电位器电阻的变化,并经集电环传递出来作为转矩信号。
2.电动机
电动式电控动力转向系统上所采用的电动机,是在一般汽车用电动机基础上加以改进后得到的。
转向助力用直流电动机需要正反转控制,图7-18为一种比较简单适用的控制电路。a1、a2为触发信号端。当a1端得到输入信号时,晶体管VT3导通,VT2得到基极电流而导通,电流经VT2、电动机、VT3搭铁而构成回路,于是电动机正转。当a2端得到输入信号时,电流则经VT1、电动机、VT4搭铁而构成回路,电动机则因电流方向相反而反转。只要控制触发信号端电流的大小,就可以控制通过电动机电流的大小。
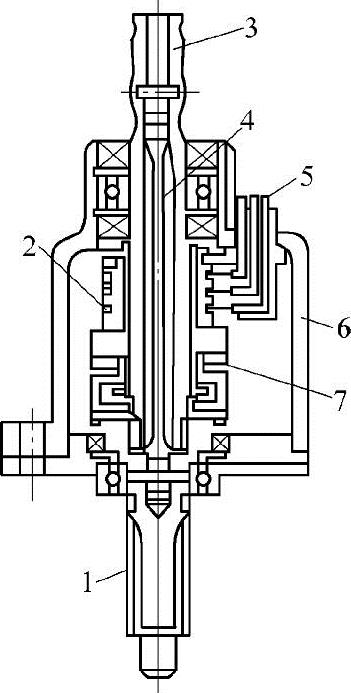
图7-17 滑动可变电阻式转矩传感器的结构
1—小齿轮 2—集电环 3—轴 4—扭杆 5—输出端 6—外壳 7—电位器
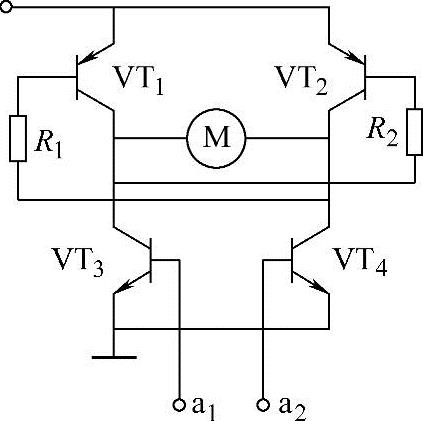
图7-18 电动机正反转控制电路
3.离合器(https://www.xing528.com)
图7-19为单片干式电磁离合器的工作原理图。当电流通过集电环进入电磁离合器线圈时,主动轮产生电磁吸力,带花键的压板被吸引与主动轮压紧,于是电动机的动力经过轴、主动轮、压板、花键、从动轴传递给执行机构。
4.减速机构
减速机构有多种形式,图7-20为蜗轮蜗杆组成的减速机构。蜗杆的动力来自于电磁离合器和电动机,经蜗轮蜗杆减速增扭后,传送给转向轴,然后再通过其他部件传送给转向轮,以实现转向助力。
(二)电动式电控动力转向系统的控制
1.控制电路
控制电路框图如图7-21所示。控制电路的中心是8位的单片微型计算机,内装256字节的RAM,4K位的ROM和8位的A-D变换器。
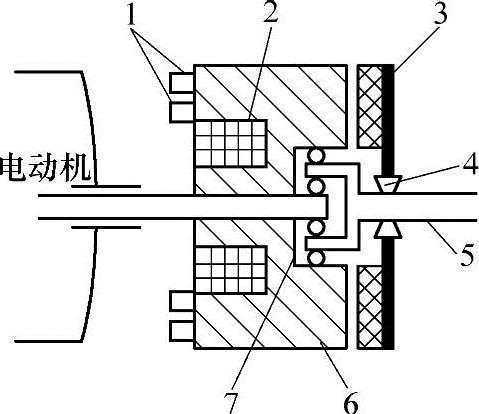
图7-19 单片干式电磁离合器的工作原理图
1—集电环 2—线圈 3—压板 4—花键 5—从动轴 6—主动轮 7—滚动轴承
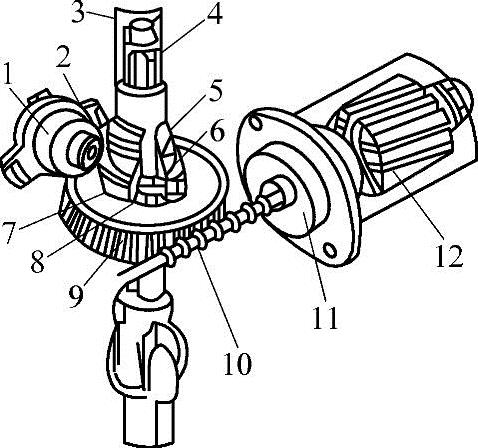
图7-20 减速机构
1—转矩传感器 2—控制臂 3—输入轴 4—扭杆 5—滑块 6—球槽 7—集电环 8—钢珠 9—蜗轮 10—蜗杆 11—电磁离合器 12—电动机
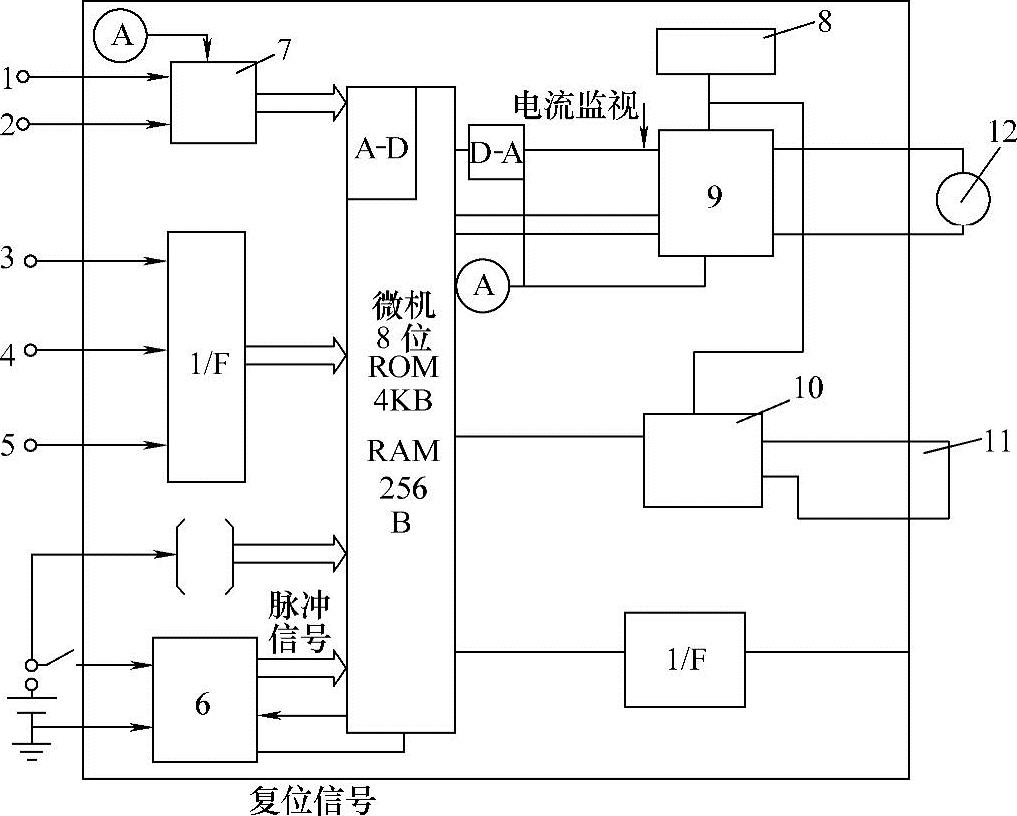
图7-21 控制电路框图
1—主转矩传感器 2—辅助转矩传感器 3—车速传感器 4—交流电动机 5—发动机转速 6—电流监视电路 7—放大电路 8—继电器 9、10—驱动电路 11—离合器 12—电动机
主传感器和辅助传感器的转矩、电动机的信号及电动机的电流信号,通过A-D变换器输入到微型计算机中,而车速信号、发动机转速、蓄电池电压和起动机开关的通断状态、交流发电动机的L端子电压则通过接口电路输入到微型计算机中。
转矩信号通过A-D变换器输入到计算机后,计算机根据车速范围按照规定的转矩——电动机电流变换值,确定出电动机的电流指令值,把电流指令值输入到D-A变换成模拟信号,之后输入到电流控制电路中去;同时,计算机还输出电动机的旋转方向指示信号,这个信号输入电动机的驱动电路后,便决定了电动机的旋转方向。
电流控制电路,把上述的已成为模拟信号的电流指令与电动机的实际电流相比较后,产生二者幅度相同的斩波信号。驱动电路收到斩波信号与旋转方向指令信号之后,则输出指令,驱动功率MOS-FET电路,控制电动机的电流,使其按规定的方向旋转。
当超过规定的车速时,离合器的驱动信号被切断,电动机与减速机构分离,同时电动机也停止工作。
2.故障诊断与安全保护
控制元件具有故障自我诊断功能,当发生电气系统故障时,能自动停止助力。同时,计算机可以记忆故障内容,并使故障指示灯点亮。维修时可读取故障码,找出故障原因。
出现电气故障后,控制电路停止向电动机供电,在装有离合器的电控动力转向系统上,离合器脱开,恢复到手动控制转向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。