



集散型计算机控制系统,简称为集散控制系统(Distributed Control System,DCS),自1975年Honeywell公司推出的TDC2000集散控制系统以来,集散控制系统在近30年的发展过程中逐步完善、成熟,20世纪80~90年代在控制领域中占主导地位。
目前对集散控制系统尚无确切的定义,其实质是利用计算机技术对生产过程进行集中监视、操作、管理和分散控制的一种新型控制技术。它是由计算机技术、信号处理技术、测量控制技术、通信网络技术和人机接口技术相互发展、渗透而产生的,既不同于分散的仪表控制系统,又不同于集中式计算机控制系统。它是吸收了两者的优点,在它们的基础上发展起来的一门系统工程技术,具有很强的生命力和显著的优越性。
1.集散控制系统的结构和组成
集散控制系统的结构是一个分布式系统,从整体逻辑结构上讲,是一个分支树结构,这与工业生产过程的行政管理结构相一致,如图2-3所示。
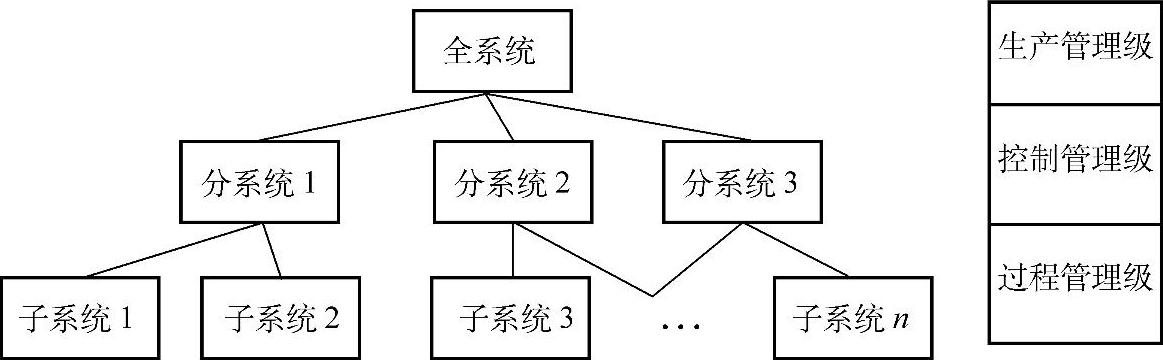
图2-3 集散控制系统结构
按系统结构进行垂直分解,它可分为过程控制级、控制管理级和生产管理级。各级既相互独立,又相互联系,每一级又可按水平分解成若干子集。从功能分散看,纵向分散意味着不同级的设备有不同的功能,如实时控制、实时监视和生产过程管理等。横向分散则意味着在同级上的设备有类似的功能。按照这种思想来设计集散控制系统的硬件和软件,就是要贯彻既集中又分散的原则。
集散控制系统主要由分散过程控制装置、集中操作和管理装置、数据通信系统三大部分组成,其典型组成结构如图2-4所示。
(1)分散过程控制装置 分散过程控制装置是集散控制系统与生产过程间的界面,生产过程的各种过程变量通过分散过程控制装置转化为操作监视的数据,而操作的各种信息也通过分散过程控制装置送到执行机构。在分散过程控制装置内,进行模/数转换,完成控制算法的各种运算,对输入与输出量进行有关的软件滤波及其他运算。
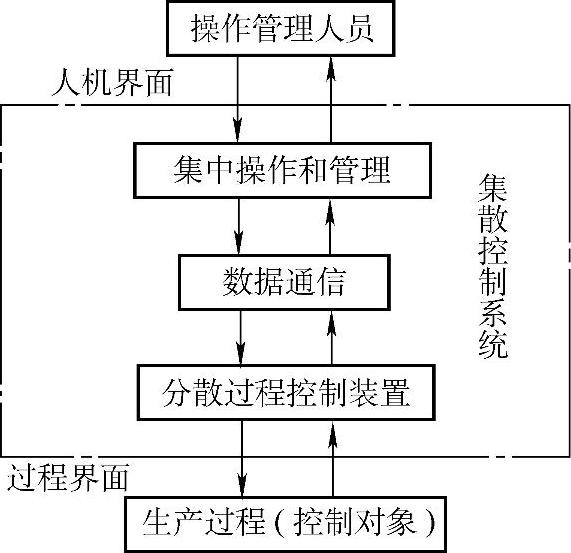
图2-4 集散系统的组成
分散过程控制装置按功能又可分为控制站、监测站或现场控制站,其中控制站可实现对现场物理信号(包括开关信号)进行实时采集,并进行数据处理、控制运算,或将结果传送到上位机。
(2)操作和管理装置 操作和管理装置是操作人员与集散控制系统间的界面,操作人员通过集中操作和管理装置了解生产过程的运行状况,并通过它发出操作指令给生产过程。生产过程的各种参数在操作管理装置上显示,以便于操作人员监视和操作。
集中操作和管理部分又可分为工程师站、操作员站和管理计算机。工程师站只供工程师使用,主要用于组态和维护;操作员站用于监视和操作,可实现控制系统的控制操作、过程状态显示、报警状态显示、历史数据的收集和各种趋势显示及报表生成与打印等;管理计算机则主要用于全系统的信息管理和优化控制。
(3)数据通信系统 分散过程控制装置与操作和管理装置之间需要有一个桥梁来完成数据之间的传递和交换,这就是通信系统。通信部分连接集散控制系统的各个分布部分,完成数据指令及其他信息的传递。集散控制系统软件是由实时多任务操作系统、数据库管理系统、数据通信软件、组态软件和各种应用软件所组成,使用组态软件这一工具,就可生成用户所要求的实用系统。
通信网络是集散控制系统的重要支柱,执行分散控制的各单元以及各级人机接口要靠通信系统连成一体,这种在局部区域内使用各种数据通信设备互连的通信网络称为局域网(LAN)。它是一个高通信速率、低误码率、快速响应的局部网络,具有组织灵活、易于扩展、资源共享的特点,然而DCS完成的是工业控制,因此它与一般的办公室用局域网有所不同,具有如下的特点:
1)具有快速响应能力,一般办公室用局域网响应时间为2~6s,而它则要求0.01~0.5s;
2)具有较高的可靠性,必须连续、准确运行,数据传送误码率低于10-8~10-11,系统利用率在99.999%以上;
3)适合于在恶劣环境下工作,能抗电源、雷击、电磁等引起的干扰;
4)为适应DCS的分层结构,其通信网络也必须具有分层结构,如分为现场总线、车间级网络系统、工厂级网络系统等不同层次。
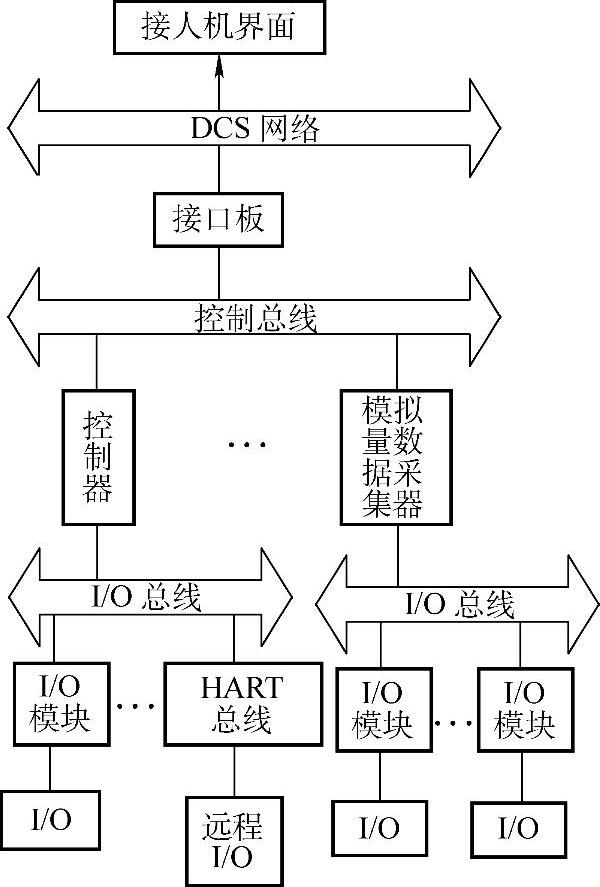
图2-5 集散控制系统网络结构
目前,集散控制系统的网络最多有四级,分别是I/O总线、现场总线、控制总线和DCS网络,其网络结构如图2-5所示。
(1)I/O总线 它把多种I/O信号送到控制器,由控制器读取I/O信号,I/O模块之间并不交换数据。I/O总线包括并行总线和串行总线。I/O总线的传输速率从每秒几十千比特到几兆比特不等,为了快速,最好采用并行总线。采用并行总线,其I/O模块必须与控制器模块相邻;若采用串行总线,I/O模块和控制器之间的距离也要比较近才行。通常把控制器模块和I/O模块装在一个机柜内或相邻的机柜内。
(2)现场总线 现场总线是20世纪90年代初发展起来的,远程I/O应该采用现场总线,如CAN(Control Area Network,控制局域网)、LonWorks(Local Operat-ing Network,局域操作网络)、HART(Highway Addressable Remote Transducer,可寻址远程传感器高速通路)总线等。在DCS中,远程I/O采用HART总线比较多,比如现场的变送器,距离控制器机柜比较远,常把来自16个变送器的信号编成一组,用HART总线把信号送到控制器,控制器同时读入来自16个变送器的信号。采用现场总线,控制器和变送器间距离可达1km以上。
(3)控制总线 把完成不同任务的控制器连在一条总线上,实现控制器之间的通信,称为控制总线,且控制总线上的不同控制器的数量不受限制。控制总线不是所有DCS都具有的,可以把各种控制器分别连到DCS网络上,控制器之间的数据调用通过DCS网络。控制总线的传输速率与I/O总线的传输速率相近,通常为每秒几十千比特到几兆比特之间,通信协议类似以太网,采用载波监听、令牌广播发送。
(4)DCS网络 它把现场控制器和人机界面连成一个系统。为了确保通信可靠,DCS生产厂商无论是电缆,还是通信接口都作成冗余的,即当一条网络发生故障,另一条备用网络立即投入运行。连在DCS通信网络上的部件称为节点(结点),它是DCS中参与网络通信的最小单位。节点可以分散配置,各DCS中各节点的距离不同,有的可达几百米。DCS网络的传输速率在每秒几十万比特~100Mbit/s之间,网络的总长度可达几千米,最短也有几百米,网络不够长时需加中继器。目前的DCS主要采用同轴电缆或光纤,通信速率为1~10Mbit/s。
2.集散控制系统的结构特征
集散控制系统是将由一些微处理器、计算机组成的子系统合成为一个大系统,它具有递阶控制结构、分散控制结构和冗余化结构的特征。
(1)递阶控制结构DCS由相互关联的子系统组成,它们各自的特性以及它们之间的关联决定了DCS的特性,由于各子系统之间需要互相交换信息,因此需要一个协调者负责此工作,它对各子系统的控制按一定的优先和从属关系来实现,形成金字塔式的结构。同一级的各决策子系统可同时对下级施加作用,同时又受上级的干预,子系统可通过上级互相交换信息。因此,DCS具有递阶控制结构。递阶控制结构具有经典控制结构所不具备的优点,主要包括:
1)系统的结构灵活,容易改变,系统容量可以扩大或缩小;
2)控制功能增强,除了直接控制外,还有优化控制、自学习、自适应和自组织等功能;
3)降低了信息存储量、计算量,减少了计算时间;
4)可设置备用子系统,降低成本,提高可靠性;
5)各级的智能化将进一步提高系统的性能。
(2)分散控制结构 分散控制结构是针对集中控制结构可靠性差的缺点而提出的,与递阶控制结构的根本区别是分散控制系统结构是一个自治的闭环结构。它的结构可以是垂直型、水平型以及两者混合的复合型。
垂直型结构,又称阶层型结构,是以上下关系为基础的结构,下位向左右方向扩大,形成金字塔形。系统的通信发生在上下位间,其主导权由上位掌握,对下位设备的动作有监视和进行调整的权限。水平型结构是对等的分散子系统以自我管理为基础的系统结构,在通信系统中,这些子系统具有平等的地位。复合型结构把水平型结构和垂直型结构结合起来,各子系统各自管理的同时,形成上下阶层关系,各子系统有较强的独立性,上位系统的故障不影响下位子系统间的数据交换和各自的功能,正常工作时,上位监视和支持下位的工作。DCS大多采用复合型分散控制结构。
DCS的分散控制结构体现在下面几个方面:(https://www.xing528.com)
1)组织人事的分散:DCS的运行需要操作人员、管理人员,功能的分散与工厂的人员管理体制应相适应。为此,DCS在组织人事的管理上采用了垂直分散的结构,其上层以数据管理、调度为主,居于全厂优化和调度管理级和车间操作管理级;下层则进行实时处理和控制,属于过程装置控制级和现场控制级。
2)地域的分散:地域的分散通常是水平型分散,当被控对象分散在较大的区域,例如油罐区的控制,则DCS就需对控制系统在地域上进行分散设置。此外,各被控对象(过程)因地理位置的因素,也有分散控制的需要。
3)功能的分散:DCS的分级是以功能分散为依据的。按控制原理分散分,则可以分为直接控制、优化控制、自学习和自适应控制、自组织控制等;按类型分散分,则可以分为常规控制、顺序控制和批量控制。在DCS中,分散的功能之间应尽可能有较少的关联,尤其是在时间节拍上的关联应越少越好。因此,通常采用的功能分散是具有人机接口功能的集中操作站与具有过程接口功能的过程控制装置的分散;过程控制装置中控制功能的分散;按装置或设备进行的功能分配以及全局控制和个别控制之间的分散等。
4)负荷的分散:DCS的负荷分散不是由于负荷能力不够而进行负荷分散,主要目的是把危险分散。通过负荷分散,使一个控制处理装置发生故障时的危险影响减至尽可能小的地步。当控制回路之间的关联较弱时,可通过减少控制处理装置处理的回路数达到危险分散的目的。当控制回路之间有较强的关联时,尤其是在顺序控制中,各回路间还存在时间上的关联,这时为了使危险分散,可进行与相应装置对应的功能分散,按装置或设备进行分散,来设置过程控制装置。
分散控制结构是以良好的通信系统为基础的。过分的分散,使系统的通信量增大,响应速度下降;同样,过分的集中,因受微处理器处理速度限制而使信息得不到及时处理,造成响应速度变慢。因此,考虑到经济性、响应性、系统构成的灵活性等因素,DCS纵向常分为3~4层。
(3)冗余化结构 为了提高系统的可靠性,DCS在重要设备、对全系统有影响的公共设备上常采用冗余结构。把所有设备都采用冗余结构是不必要也是不经济的,应对冗余增加的投资和系统故障停工造成的损失进行权衡比较,考虑合适的冗余结构方式。常采用的冗余方式有:
1)同步运转方式:同步运转方式应用于要求可靠性极高的场合,它是让两台或两台以上的装置以相同的方式同步运转,输入相同的信号,进行相同的处理,然后对输出进行比较,如果输出保持一致,则系统正常运行。两台同步运转方式运行的系统称为双重系统。这种冗余方式常用于信号联锁系统,一些重要的联锁系统常采用“三中取二”的方式来提高系统的可靠性。
2)待机运转方式:待机运转方式的冗余结构采用N台同类设备,备用一台后备设备,平时后备设备处于准备状态,一旦N台设备中某一台发生故障时,能起动后备设备使其运转。当一台设备工作、一台设备后备时,称该系统为双工系统或1∶1备用系统。N台设备工作、备用一台后备的系统为N∶1备用系统。由于备用设备处于待机工作状态,故又称热后备系统。在这种方式中,需要有一个指挥装置处理故障发生时软件、数据的转移等操作,还需由相应程序自动切入备用设备,使之运转。
DCS中,根据装置的重要性,选用待机运转方式。通信系统为了保证高的可靠性,通常采用1∶1备用方式,多回路控制器常采用N∶1备用方式,N的数值与制造厂商的产品特性有关。
3)后退运转方式:正常时,N台设备各自分担各自的功能以进行运转,当其中一台设备损坏时,其余设备放弃部分不重要功能,以此来完成损坏设备的功能,这种方式称为后退备用方式。这种方式的应用例子是CRT和操作站。通常,采用二台或三台操作站。通过分工,可以让第一台用于监视,第二台用于操作,第三台用于报警。当任一台故障时,监视和操作功能在正常操作台上完成。而当系统开、停车或紧急事故状态,这三台操作站都可用于监视或操作。
4)多级操作方式:多级操作方式是一种纵向冗余的方法,正常操作是从最高一层进行的,如该层故障,则由下一层完成,这样逐步向下形成对最终元件执行器的控制。DCS中的有关功能模块都设有手动、自动切换开关。自动时,由该功能模块自动操作输出信号;手动时,由人工操作输出信号。通常一个控制回路的最高层操作是在操作站的自动状态下进行,其设定值也可由更高一层的优化层给出。当它失效时,切换为手动,通过键盘输入,对执行器进行手动操作。如该模块失效,可通过输出模块的手动,在通信失效时由分散控制装置的编程器转入自动或手动,一旦DCS全部故障,最终还可用执行器的手轮机构实施现场手动控制。
3.集散控制系统的典型结构
(1)模件化控制站+宽带、载波带局域网+信息综合管理系统 这是一类最新结构的DCS。作为大系统,通过宽带和载波带网络,可在很广的地域内应用。通过现场总线,系统可与现场智能仪表通信和操作。这是一类开放的、系统互连的、具有互操作性的系统,是第三代DCS的典型结构,如图2-6所示。
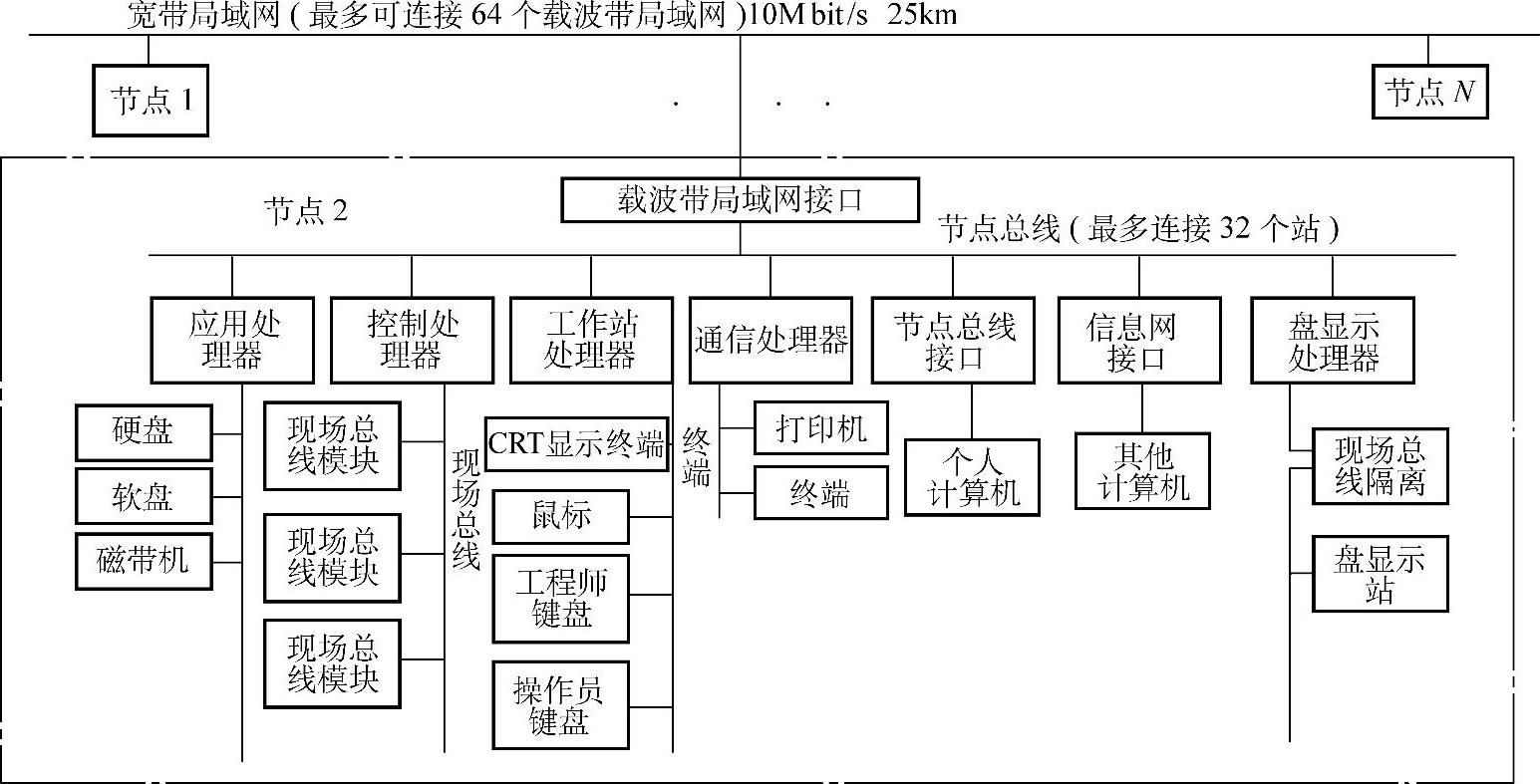
图2-6 第三代集散控制系统的结构
由图2-6可见,系统每个节点工作站采用节点总线将各种控制器以及其他单元的接口连接起来,挂接了6类处理器或接口。其中,应用处理器实质上是一种与大容量存储器相连的接口装置,执行系统管理功能,支持系统软件;通信处理器是节点与RS-232设备的通信接口;信息网接口是节点与子通信网相连的接口;载波带局域网接口是节点挂接到系统网络上的通信接口;工作站处理器是节点与所带的本地操作站主机及附属的外部设备的接口;控制处理器是执行分散控制功能的主控设备,可以进行连续控制、顺序控制、批量控制、数据采集等多功能、多回路控制,它通过现场总线与传感器、执行器相连。
(2)分散过程控制站+局域网+信息管理系统 由于采用局域网技术,使通信性能提高,连网能力增强。这是第二代DCS的典型结构,如图2-7所示。
(3)分散过程控制站+高速数据公路+操作站+上位机 这是第一代集散控制系统的典型结构。
(4)可编程序控制器(PLC)+通信系统+操作管理站 这是一种在制造业广泛应用的DCS的结构,尤其适用于有大量顺序控制的工业生产过程。DCS制造商为适应顺序控制实时性强的特点,现已有不少产品可以下挂各种型号的PLC,组成PLC+DCS的形式,应用于有实时性要求的顺序控制和较多回路的连续控制的场合。
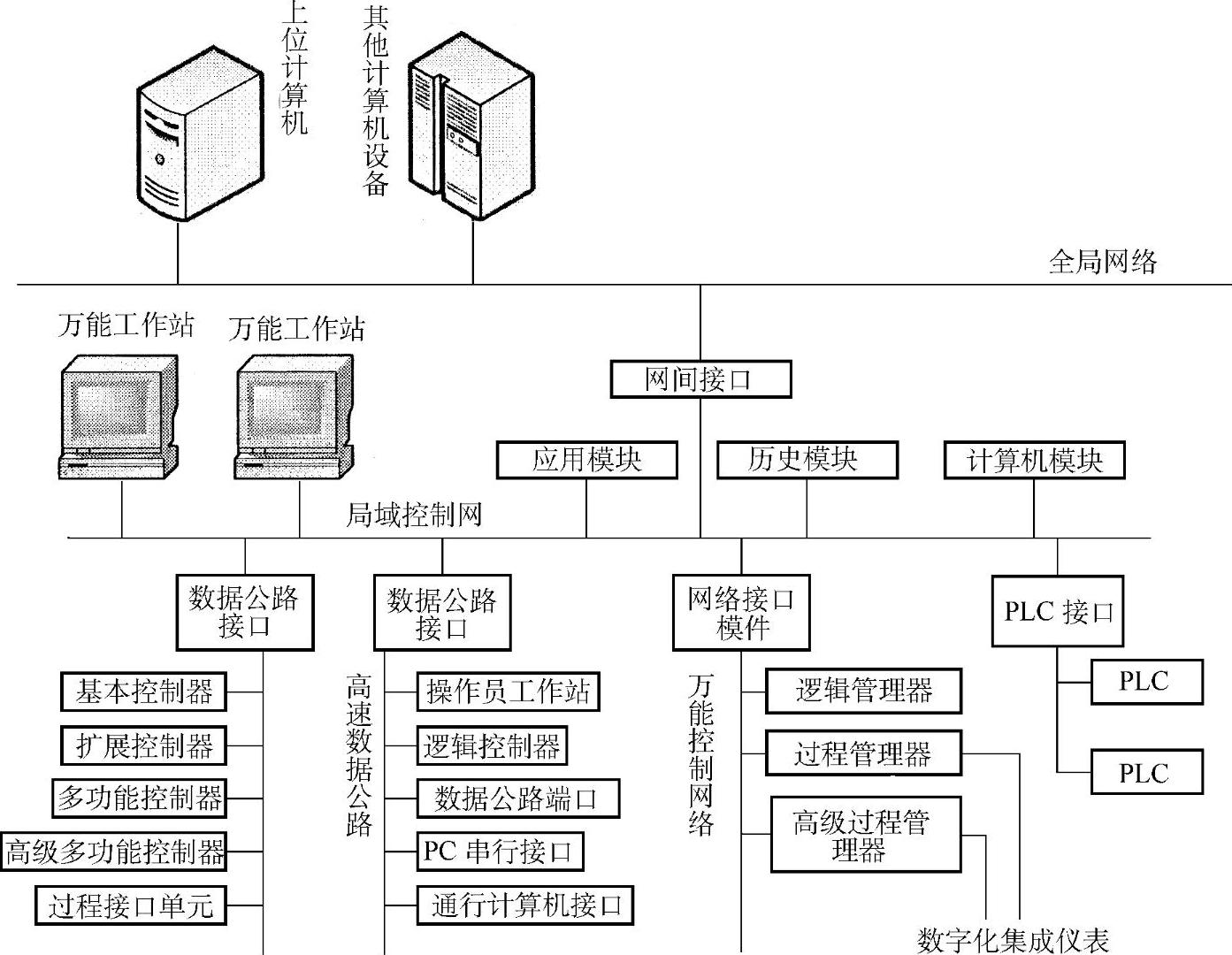
图2-7 第二代集散控制系统的结构
(5)单回路控制器+通信系统+操作管理站 这是一种适用于中、小型企业的小型DCS结构,它用单回路控制器(或双回路、四回路控制器)作为盘装仪表,信息的监视操作由操作管理站或仪表面板实施,有较大的灵活性和较高的性价比。
(6)工业级微机+通信系统+操作管理机 工业级微机作为多功能多回路的分散过程控制装置,相应的软件也已由软件厂商开发。
4.集散型BAS的几种方案
(1)按楼宇建筑层面组织的集散型BAS 对于大型的商务楼宇、办公楼宇,往往各个楼层有不同的用户和用途(如首层为商场,二层为某机构的总部等),因此各个楼层对BAS的要求有所区别,按楼宇建筑层面组织的集散型BAS能很好地满足要求。
按楼宇建筑层面组织的集散型BAS方案如图2-8所示。由于是按楼宇建筑层面组织的,因此布线设计及施工比较简单,子系统(区域)的控制功能设置比较灵活,调试工作相对独立,整个系统的可靠性较好,子系统失灵不会波及整个楼宇系统。设备投资增大,尤其是高层楼宇,较适合商用的多功能楼宇。
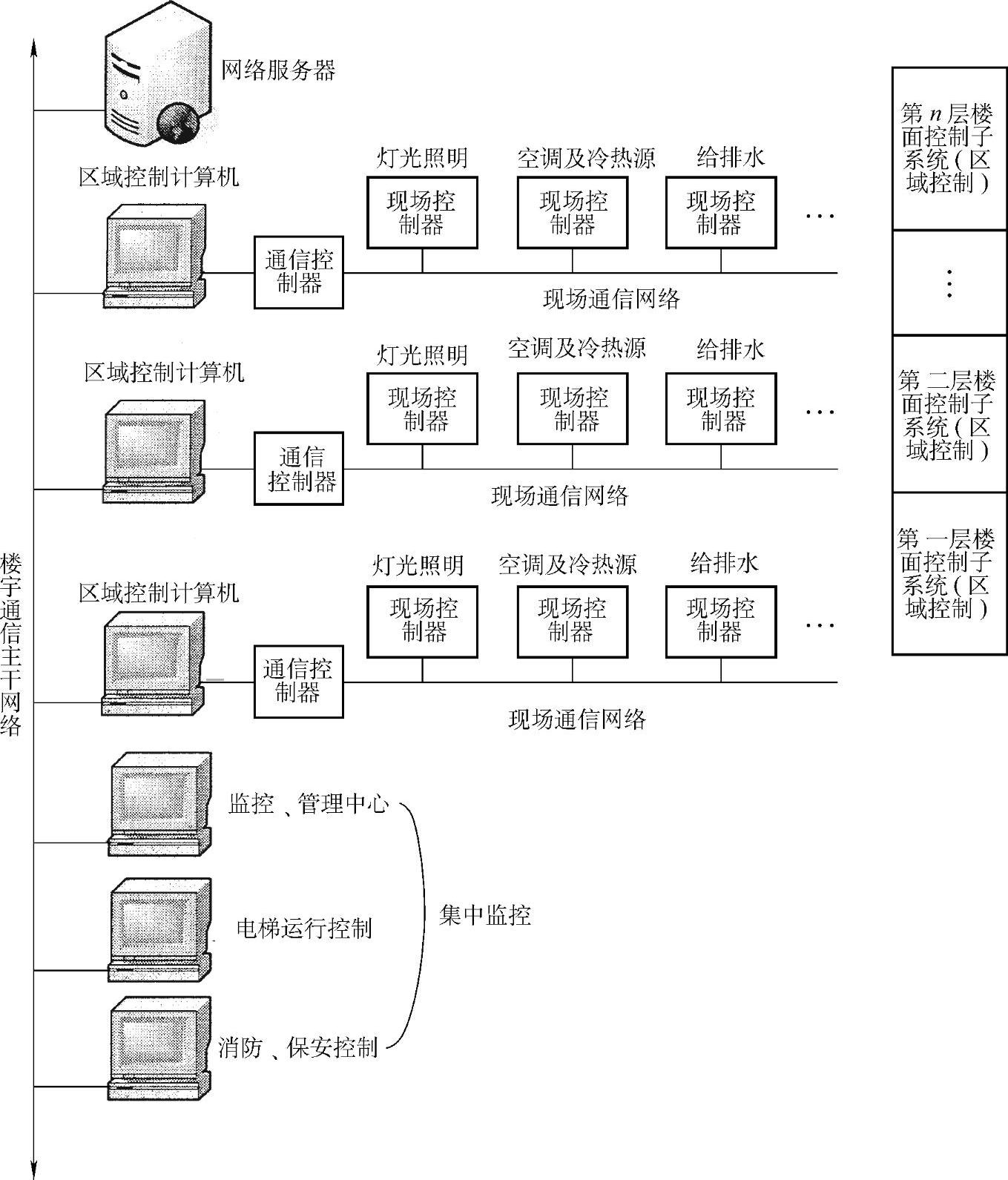
图2-8 按楼层组织的集散BAS结构
(2)按楼宇设备功能组织的集散型BAS 这是常用的系统结构,按照整座楼宇的各个功能系统来组织,其结构如图2-9所示。由于是按整座楼宇设备功能组织的,因此布线设计及施工比较复杂、调试工作量大;整个系统的可靠性较弱,子系统失灵会波及整个楼宇系统,但设备投资省,较适合功能相对单一的楼宇(如企业、政府办公楼宇、高级住宅等)。
(3)混合型的集散型BAS 这是兼有上述两种结构特点的混合型系统,即某些子系统(如供电、给排水、消防、电梯)采用按整座楼宇设备功能组织的集中控制方式,另外一些子系统(如灯光照明、空调)则按楼宇建筑层面组织的分区控制方式。这是一种灵活的结构系统,它兼有上述两种方案的特点,可以根据实际的需求而调整。
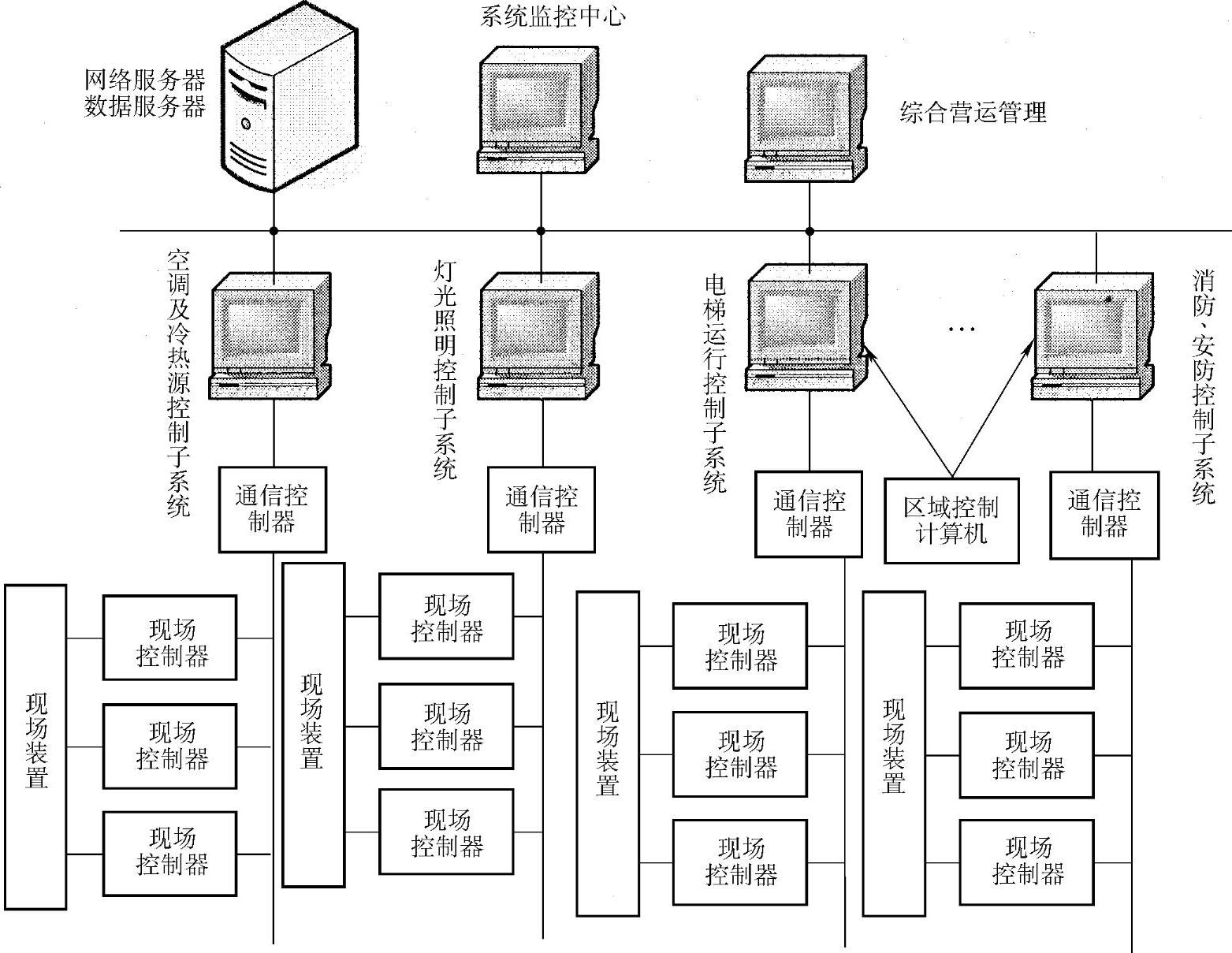
图2-9 按设备功能组织的集散型BAS结构
5.集散控制系统面临的挑战
随着控制技术、计算机技术、通信技术和网络等技术的成熟与发展,在实际生产需求的驱动下,20世纪80年代产生的现场总线,是控制技术又一个新时代的开始。现场总线控制系统(Fieldbus Control System,FCS)以现场总线为基础应用于生产现场,在测量和控制设备之间实现双向、串行、多节点数字通信的系统,也被称为开放式、数字化、多点通信的底层控制系统。
FCS较DCS有诸多的优点,这使得在控制领域一直为主流的DCS受到了极大的冲击。例如,FCS的结构比DCS简单,由于现场总线技术将专用微处理器置入测量控制仪表、执行器等现场设备之内,使这些现场设备各自都具有数字计算、逻辑判断、数字通信和智能功能,因此FCS中没有了控制器,其控制功能已有现场仪表及设备来实现。由于结构上的改变,FCS比DCS更节约硬件设备。使用FCS可以减少大量的隔离器、端子柜、I/O卡及I/O端口,这样就节省了I/O装置及装置室的空间;同时减少了大量电缆,可以极大地节省安装费用。由于免去了D/A与A/D转换,使仪表准确度得到极大的提高;通过将比例积分微分(PID)控制功能植入到相应的智能传感器中去,使控制周期大为缩短。目前FCS可以从DCS的每秒调节2~5次增加到每秒调节10~20次,改善了调节性能。更明显的是,两者的传输介质差别很大,DCS需要多根导线,例如100个检测点需101根导线,而FCS仅需1根双绞线。
FCS在不久的将来肯定要取代DCS,在本书的第6章中将重点对这种新的控制技术进行详细介绍,以适应未来技术发展的脚步。然而多种现场总线并存,就意味着有多种标准,这就严重束缚了现场总线的应用和发展。此外,由于目前FCS是一种新技术,应用时间不太长,因此与成熟的DCS相比,还存在一些不足。例如在某些场合中,FCS还无法提供DCS已有的控制功能;由于软硬件水平的限制,其模块的功能还不是很强,品种也不够齐全;用现场仪表还只能组成一般的控制回路,如单回路、串级、比例控制等,对于复杂、先进的控制算法还无法在仪表中实现。由于这些原因,FCS取代DCS将是一个渐进演变的过程,在这一过程中,对控制系统的设计与选用应全面考虑。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。