



自动更换方式是动力电池快速更换的主要方式,由更换机械装置和控制系统共同构成的更换机器人来完成。更换机器人由底盘、垂直升举装置、托盘、充电架、电磁吸取装置和液压传动等组成,如图8-1和图8-2所示。

图8-1 电池更换机器人
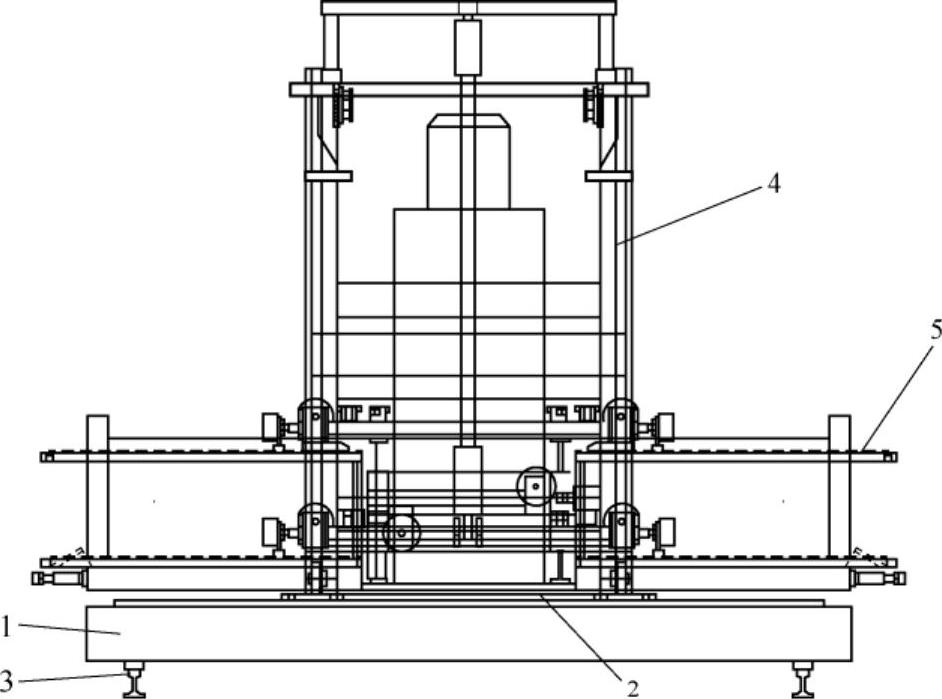
图8-2 动力电池自动更换系统总体结构
1—平行移动平台 2—旋转平台 3—轨道 4—垂直升举装置 5—电池托盘
1.底盘
如图8-2所示,底盘部分包括平行移动平台1和旋转平台2两部分,可实现直线运动和回转运动。更换设备整体是一个可独立行走的水平移动轨道车,在移动的同时实现设备沿电动客车车身方向对电池系统的定位。其中,直线移动方式采用钢轨和槽轮组成的轨道3定位方式,并采用伺服电动机驱动,保证了平移的稳定性和定位的准确性。旋转平台可以实现车上电池与存储架电池的更换,并且可以通过回转角度的调节来调整更换设备和车的平行度。该平台采用了回转支撑与伺服电动机配套驱动方式,可以利用回转轴承高精度、低间隙以及伺服电动机的恒扭矩等特性,来保证旋转平台的水平回转及定位的准确性。
2.垂直升举装置(升降臂)(https://www.xing528.com)
垂直升举装置(图8-2中部件4)可以实现电池组垂直方向的运输和定位调整,并且具备在电池更换过程中,随着车辆悬架刚度变化来随动调整电池搁置平台高度的功能。该装置采用了内外门架以及滑架组合套嵌的方式,在保证举升行程的前提下,降低了设备自身的重心高度,从而提高了稳定性。同时在各个部件之间设置轴承滚轮和间隙调整装置,保证了各部件运动的灵活性,提高了运动精度。
3.电池托盘与充电架
电池托盘(图8-2中的部件5)用于存放电池,通过与门架的连接可以保证其拥有足够的刚度。采用直线导轨的连接方式,可以保证托盘伸缩的灵活性、方向性和稳定性。直线导轨通过液压驱动的方式来实现更换机械在水平方向靠近电动客车或电池存储平台,保证了更换过程中车与设备的无缝连接。电池架安装在电池托盘上,可以随托盘的伸缩而运动。
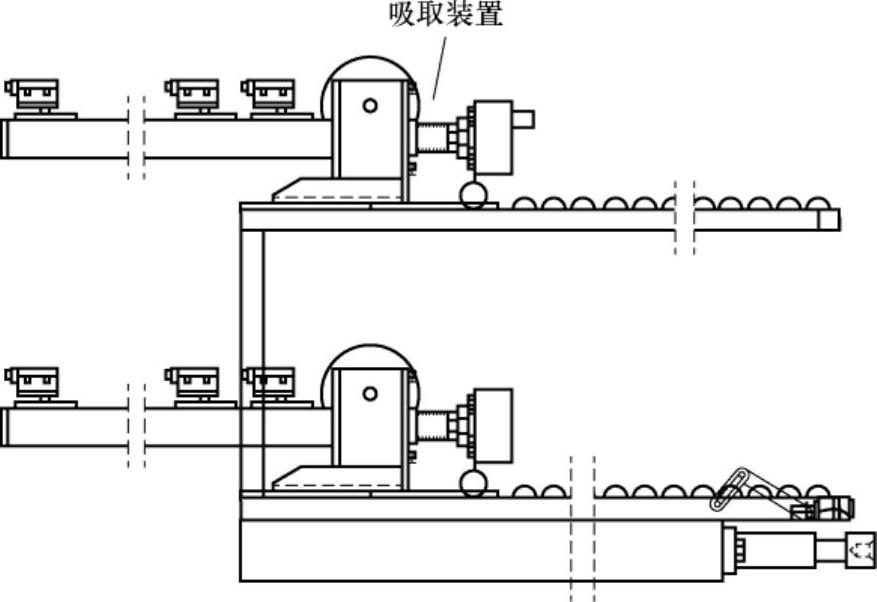
图8-3 电磁吸取装置
4.电磁吸取装置
电磁吸取装置可以实现电池箱在存储平台和车辆电池舱的推入和拉出。如图8-3所示,电磁吸取装置包括电磁吸盘1和电动缸2。电磁吸盘通过电动缸,在电池托盘4上前后移动。当移动到电池托盘前端时,通过行程开关控制系统3向电磁吸盘供电,将电池箱吸附在电磁吸盘上,然后电动缸驱动电磁吸盘向后移动,将电池箱从电池架上或车辆电池舱内拉至电池托盘上。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。