



上面所介绍的电子控制系统多属日本汽车公司所采用。在欧洲,也有知名度很高的操纵稳定性电控系统,“电子稳定性程序控制(ESP)系统”就是其中之一,下面对它作大体介绍。
电子稳定性程序控制系统的英文全称为Electronic Stability Program,简称为ESP。
1.ESP的前身为VDC
VDC的全称为车辆动力学控制系统(Vehicle Dynamics Control System)。
VDC是德国Bosch公司继1978年向市场提供ABS、1986年提供ASR(即TCS)以后,于1995年投放市场性能优良的新型主动安全系统,称为Bosch公司主动安全系统发展过程中的第三个里程碑。产品名称后来定为ESP。
ESP在ABS和ASR的基础上,增加了转向横摆率传感器、侧向加速度传感器、转向盘转角传感器和零频率响应轮速传感器,通过电子控制器ECU来控制前后、左右车轮的驱动力和制动力。汽车处于极限工况时,ESP系统能使驾驶人以正常的操作就能顺利地通过原本难以驾驭的危险工况。
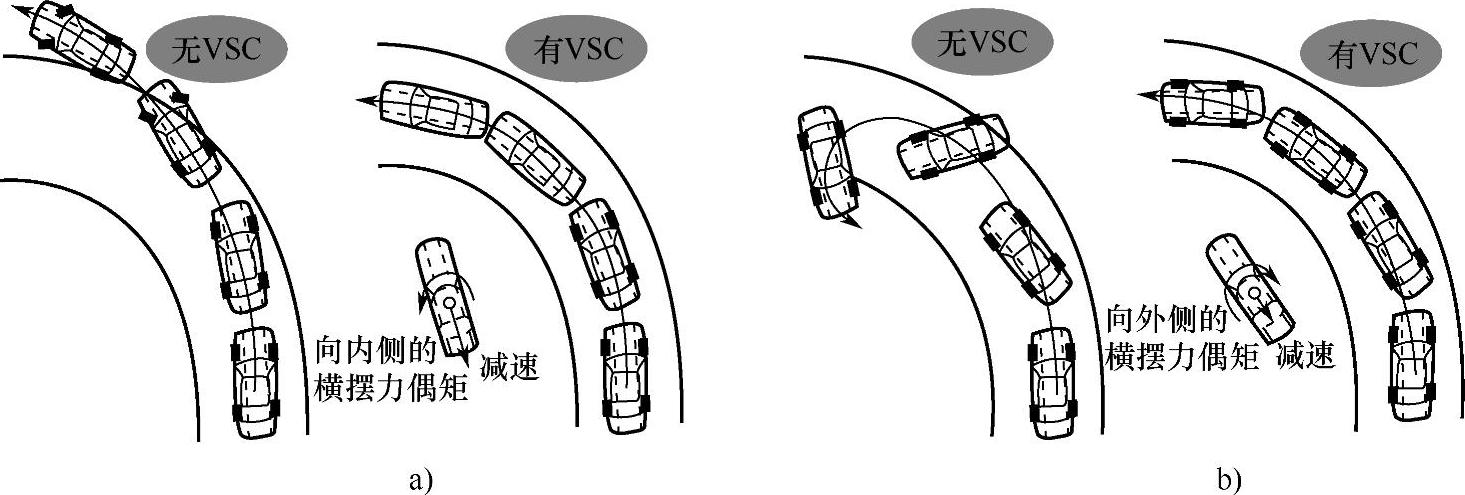
图4-45 VSC如何抑制侧滑
a)抑制前轮侧滑:无VSC汽车向外侧驶出,有VSC汽车路径与弯道一致 b)抑制后轮侧滑:无VSC汽车向外滑甩尾、猛转,有VSC汽车路径与弯道一致
2.ESP的工作原理
ESP能作出两方面的判断:一是根据驾驶人开车时的转向盘转角、加速踏板移动位置以及制动管道油液压力,判断驾驶人的操作意图;二是根据汽车的横摆角速度、侧向加速度,判断汽车的正在的行驶状况。ESP根据判断作出反应,通过调节发动机功率、由左右侧车轮制动力差构成的横摆力偶矩及总制动力来对汽车所处不良工况作出调整,使汽车行驶状况尽可能地接近驾驶人的操作愿望。
ESP的信号来源是多方面的,所具智能程度相当高。如果说ABS与ASR的信号来源比较单一的话,那么ESP系统由各种传感器组成庞大的监视网络所采集的信号则是多方面的,它能高灵敏、高精确地采集到来自加速、制动、滑移、滑转、侧偏、直行、转向等方面的信号,经过电子控制器的处理,一旦判断出汽车哪一方面存在不稳定工况,便及时而迅速地作出相应的动作反应,以维持汽车的操纵稳定性。
3.ESP的控制方法举例
ESP控制方法的基础是根据传感器的信号对汽车即时的行驶状态作出判断,继而实施控制。
下面举例的是:ESP是如何以横摆角速度ω作为传感信号来判断汽车行驶状态是属于过度转向或是属于不足转向并采取相应控制措施的。
我们把横摆角速度ω分为期望值ωd和实际值ωa。期望值是通过测得的前轮转向角δ以及车速u等参数计算而得;实际值是由即时的车速转感器提供,也可以根据测得的横摆力矩以及侧向加速度等计算而得。两者的差值Δω则反映了汽车实际行驶状态偏离期望状态(理想状态)的程度。差值Δω可表达为(https://www.xing528.com)
Δω=ωd-ωa
如果我们设定,a为过度转向门槛值,b为不足转向门槛值,那么要使汽车具有过度转向应满足
Δω<a
具有不足转向应满足
Δω>b
根据这个差值Δω以及实际横摆角速度、前轮转向角,电子控制器ECU便可判断出汽车行驶状态是属于过度转向或是不足转向,继而采取相应控制措施。然而这些控制措施是如何实现呢?说到底,这些控制措施都要通过改变轮胎与地面间的作用力来实现,具体如下。
(1)过度转向的控制措施 勿忘记,过度转向的基本特征是汽车转向半径越来越小。一旦ESP判断出汽车处于过度转向,首先由驱动力分配系统对驱动轮实施降低驱动力矩,以增大后轴的侧向附着力;为此,后轴所受到的地面侧向反作用力就得以相应增大,从而产生一个与过度转向相反的横摆力矩,以抵抗后轴向外侧滑移。但是,位于弯道外侧的非驱动前轮在刚开始时几乎保持滚动而无滑移,在此情况下仅依靠动力分配系的干预还不足以制止刚发生的转弯半径越来越小的趋势,控制系统还必须对该前轮实施强制动,使它产生较高的滑移率,以此来使该前轮的纵向制动力迅速增大而地面侧向反作用迅速减小(因为轮胎的纵向附着力与侧向附着力是此减彼增的关系),由此也产生一个与横摆方向相反的横摆力矩,有效地遏制了前轮往内侧“卷入”的势头。仅对一只前轮实施制动除了产生以上效果之外,还由于车速的降低而有利用于抑制过度转向继续漫延,这与“若发现过度转向征兆首先降低车速”的原则是一致的。图4-46为ESP对过度转向的控制。
注意:由于后驱动汽车出现过度转向的几率较大,以上例子中的汽车应为后驱动汽车。
(2)不足转向的控制措施 同样勿忘记,不足转向的基本特征是汽车转向半径越来越大。必须指出,适当的不足转向是期望的转向特性,不需控制,所需控制的是过量的不足转向。
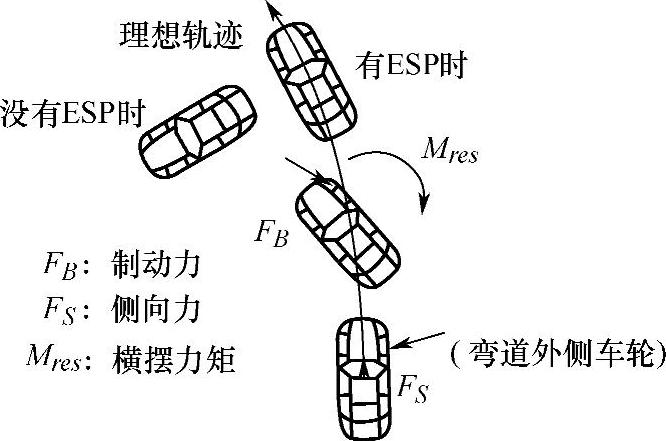
图4-46 ESP对过度转向的控制
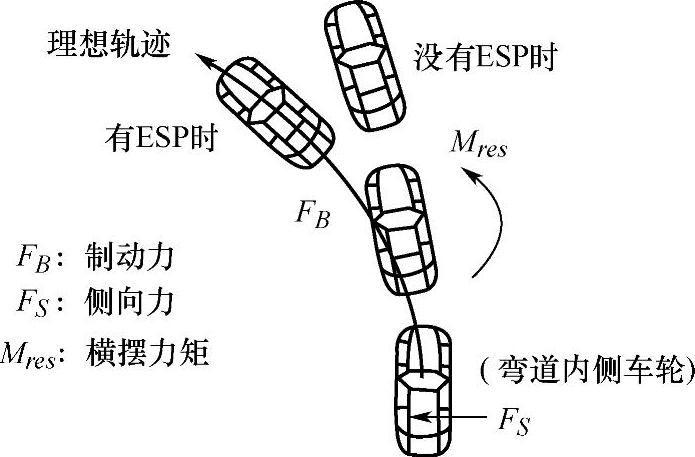
图4-47 ESP对过量的不足转向的控制
一旦ESP判断出汽车具有过量的不足转向倾向,控制系统会自动对位于弯道内侧的后轮实施瞬间制动,以产生预定的纵向滑移率,至使该车轮纵向制动力迅速增大而地面侧向反力迅速减小,于是产生了一个与转向盘转向相同的横摆力矩,起到了减小过分不足转向量的作用,遏制了汽车过分往外侧“驶出”的势头,使驾驶人感到方向操作如常。再则,由于差速器的作用,仅对内侧后轮实施制动还导致了同轴外侧后轮加速,于是又产生了一个所期望的横摆力矩,也可以说是上一个横摆力矩的叠加,起到了助遏作用。图4-47为ESP对过量不足转向的控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。