



四轮转向电控系统的英文全称为Four Wheel Steering System,简称为4WS。
只有前车轮装有转向装置的汽车称为二轮转向汽车(2WS),普通轿车均属2WS汽车。仅前轮转向的汽车,转弯半径较大,在中、高速转弯时后轮(尤其是外侧后轮)存在向外侧运动的倾向,车身后部总是向外侧甩出一点、车身以稍稍横着一点的姿态进行曲线运动,增加了驾驶人方向判断与操作上的困难。
前、后车轮都装有转向装置的汽车则称为四轮转向汽车(4WS)。因此,4WS汽车在转弯时,后轮随着前轮的转向也有相应的转向运动。
4WS汽车的后轮转向特点可参看图4-41和图4-42。其特点是:当车速低于40km/h时,后轮逆向偏转,最大转向角为5°。随着车速的提高,后轮转向角逐渐减小,当车速达到40km/h时,后轮转向角恢复为0°。当车速大于40km/h时,后轮同向偏转,最大转向角为2.5°。4WS汽车后轮的同向偏转与逆向偏转的切换是通过电控单元来实现。
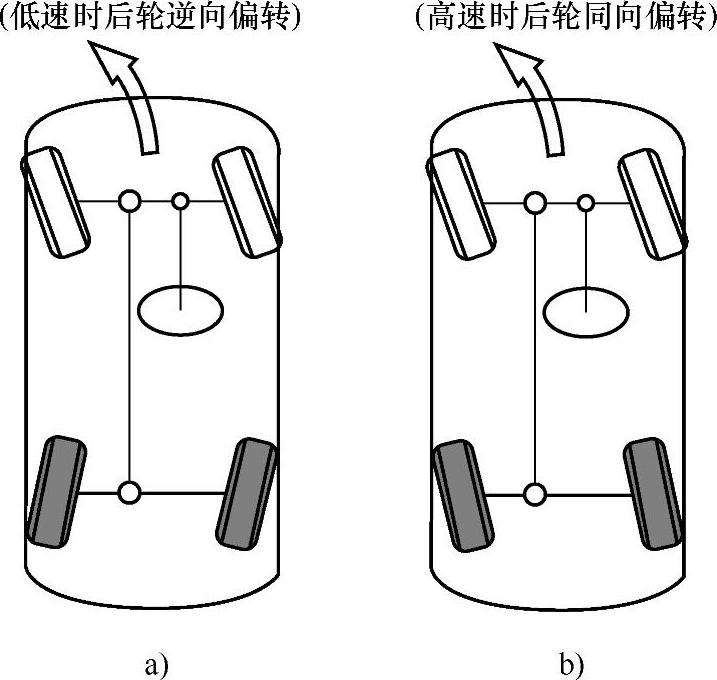
图4-41 4WS汽车的后轮转向特点
a)低速转弯时,后轮表现为逆向偏转 b)高速转弯时,后轮表现为同向偏转(https://www.xing528.com)
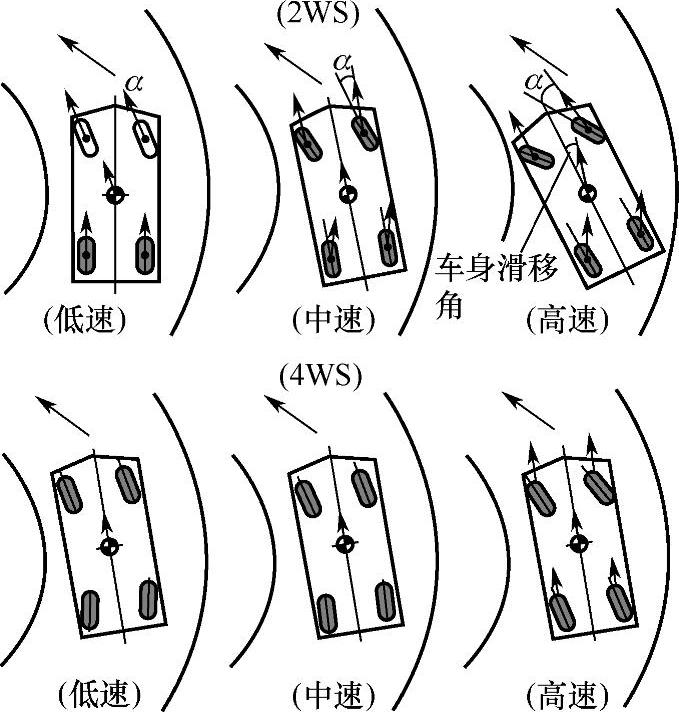
图4-42 2WS与4WS汽车在转向时后轮的运动特点对比
图4-43为2WS与电控4WS汽车在变线行驶中的路径与车厢姿态。电控4WS汽车车身在转弯时质心侧偏角总是接近于零,车厢的纵向中心线与行驶轨迹方向基本一致,汽车自然流畅地进行曲线运动,使驾驶人能方便地判断路径方向与操作,显著地改善了操纵稳定性。
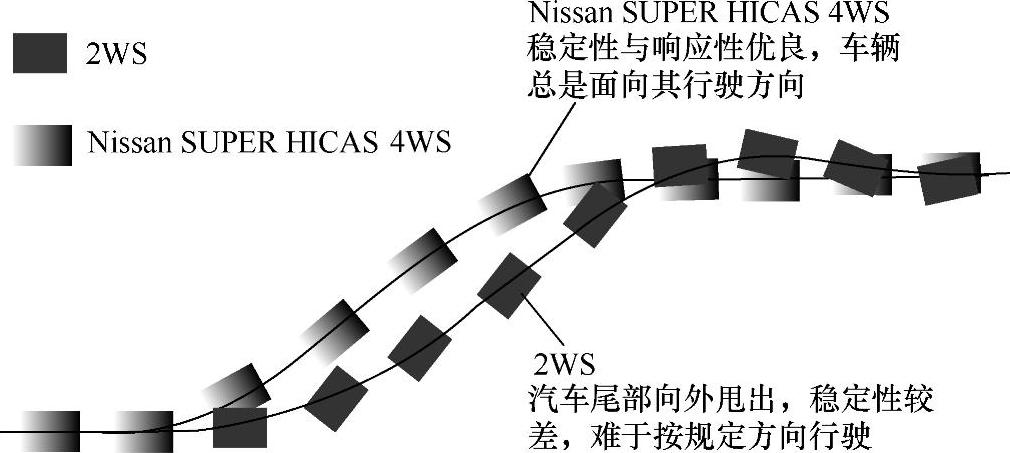
图4-43 2WS与Nissan SUPER HICAS 4WS汽车在变线行驶中的路径、车厢姿态
电控4WS汽车首先由日产公司于1985年推出。而后各汽车厂家也对各种四轮转向装置进行了实用化。到20世纪90年代中期,随着橡胶圈的运用和多连杆式悬架系统等的进步,采用四轮转向装置可以改善汽车低速转向的灵活性。图4-44为三种形式的四轮转向装置,左图为机械式,前轮转向角决定后轮转向角,其他均通过ECU控制后轮转向角。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。