



1.用K值对转向半径R的影响来表征
由于汽车以行驶速度u作角速度ωr的等速圆周运动,等速圆周运动的半径为R,则有

上式表明,对于轴距为定值的汽车,其转向半径R与行驶速度u、前轮转向角δ以及稳定性因数K的变化有关,见图4-4。下面,我们通过式(4-5)转向半径R值的变化来表述三种稳态转向特性。
(1)K=0时,R不变——中性转向 当稳定性因数K=0时,从式(4-5)可得
由此可见,汽车的转向半径R已经与行驶速度u无关,无论车速怎样改变,只要前轮角阶跃输入不变——即前轮的转向角δ保持不变,汽车的转向半径总是保持一个定值
如图4-5中的平行线。这种稳态转向称为中性转向。
(2)K>0时,R变大——不足转向 当稳定性因数K>0时,从式(4-5)可得(1+Ku2)>1
亦即

这表明,汽车转向半径R值比中性转向时增大了,并且随车速u的增加而增大(如图4-5中的上翘曲线)。这种稳态转向称为不足转向。

图4-4 不同K值对转向半径的影响

图4-5 车速对不同K值汽车的转向半径的影响
(3)K<0时,R变小——过度转向 当稳定性因数K<0时,从式(4-5)可得
(1+Ku2)<1亦即

上式表明,汽车转向半径R值比中性转向时减小了,并且随车速u的增加而减小(如图4-5中的下弯曲线)。这种稳态转向称为过度转向。图中的ucr是汽车引发过度转向的临界车速。
过度转向工况的延续,将出现转向半径越来越小的“卷入”现象,这将导致汽车发生转头,驾驶人心理恐慌,若处理不当将造成倾覆。由于过度转向容易使汽车丧失操纵稳定性,故汽车设计都应给汽车具有适度的不足转向,而避免过度转向。适度的不足转向不仅人为可控,而且与人的通常驾驶操作习惯相一致。
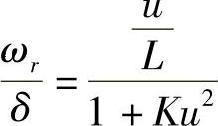
2.用K值对横摆角速度增益的影响来表征
横摆角速度增益的表达式(4-4)为

1)当K=0时,式(4-4)分母等于1,横摆角速度增益

即横摆角速度增益与车速成线性关系,斜率为1/L(如图4-6中的斜线)。这种稳态转向称为中性转向。

图4-6 不同K值汽车的稳态横摆角速度增益线
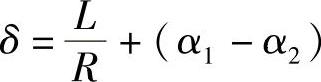
但应说明,此关系式是汽车以极低车速行驶而无侧偏角时的转向关系(参看图4-7)。在无侧偏角时,前轮转角δ≈L/R,转向半径R≈L/δ,横摆角速度ωr≈(u/L)δ。因此,横摆角速度增益为
2)当K>0时,式(4-4)的分母为
(1+Ku2)>1
横摆角速度增益 值比中性转向时小了,
值比中性转向时小了, 与车速的关系不再成线性关系,而是一条开始与中性转向的稳态横摆角速度增益线相重合,而后来又变为下弯的曲线(参看图4-6)。K值越大,横摆角速度增益越低,不足转向量越大。这样的转向特性称为不足转向。
与车速的关系不再成线性关系,而是一条开始与中性转向的稳态横摆角速度增益线相重合,而后来又变为下弯的曲线(参看图4-6)。K值越大,横摆角速度增益越低,不足转向量越大。这样的转向特性称为不足转向。
3)当K<0时,式(4-4)的分母为
(1+Ku2)<1
横摆角速度增益 值比中性转向时大了。在开始车速较低时,横摆角速度增益线与中性转向的增益线相重合,但若速度再增大到某一车速时,其增益线则向上翘曲,增益增长迅猛(参看图4-6)。K值越小,横摆角速度增益越高,过度转向量越大。这样的转向特性称为过度转向。
值比中性转向时大了。在开始车速较低时,横摆角速度增益线与中性转向的增益线相重合,但若速度再增大到某一车速时,其增益线则向上翘曲,增益增长迅猛(参看图4-6)。K值越小,横摆角速度增益越高,过度转向量越大。这样的转向特性称为过度转向。
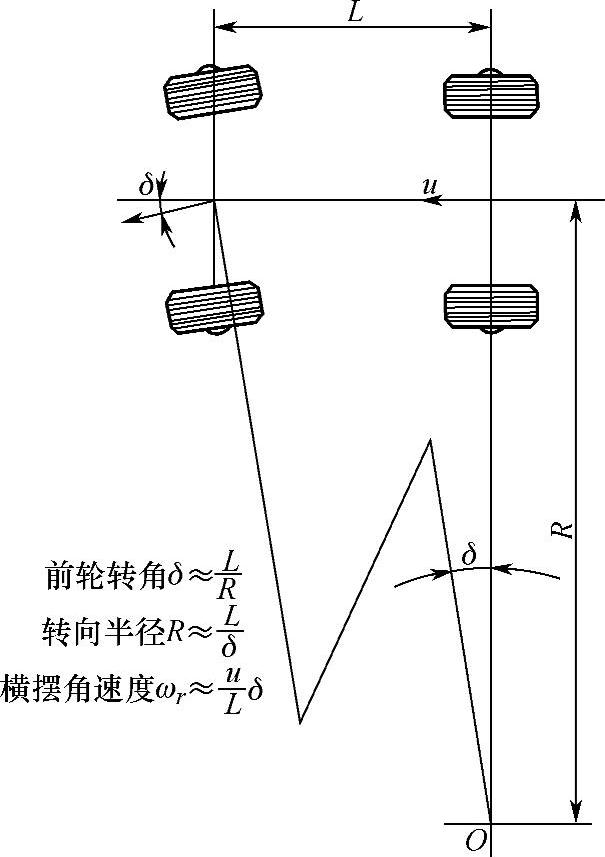
图4-7 轮胎没有侧偏角时汽车的转向运动
[实例]美国对安全试验车的要求是横摆角速度增益曲线应落在图4-8所示的满意区域内。图中的满意区域是通用公司根据不同种类的轿车,如豪华轿车、旅行轿车以及运动型轿车进行的操纵稳定性试验提出的。图4-8中的实线是一种日产车的横摆角速度增益随汽车行驶速度的变化。
3.用其他参数来表征转向特性
下面三种参数亦可用来表征三种稳态转向特性:
1)前、后车轮侧偏角绝对值之差(α1-α2):
①当(α1-α2)=0时,则K=0,为中性转向。
②当(α1-α2)>0时,则K>0,为不足转向。
③当(α1-α2)<0时,则K<0,为过度转向。
以上得出的(α1-α2)与稳定性因数K的关系由以下方法推导:
(α1-α2)为前、后轴轮胎侧偏角绝对值之差,也是描述和评价汽车稳态响应的一个参数。它与K的关系式由下面推导得出:
前面得出的稳定性因数K的表达式为

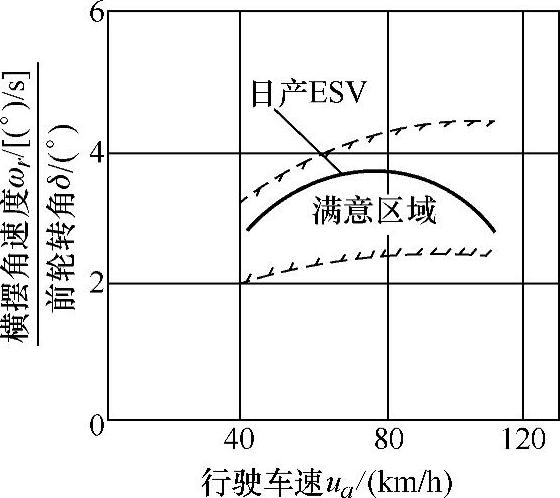
图4-8 美国试验安全车稳态横摆角速度增益的满意区域
当前轮的转向角δ较小时,存在
FY=may=FY1+FY2=k1α1+k2α2

将式(4-4)右边上下各乘以侧向加速度ay,则有

由于侧向加速度ay与前、后轮的侧偏角α1和α2符号相反,当前、后轮侧偏角取绝对值时,侧向加速也取绝对值,则上式可写成

上式(4-6)即为稳定性因数K与前、后轮侧偏角(α1-α2)的关系,也是稳定性因数K的另一表达式。从此式可知
①当(α1-α2)=0时,则K=0,为中性转向。(https://www.xing528.com)
②当(α1-α2)>0时,则K>0,为不足转向。
③当(α1-α2)<0时,则K<0,为过度转向。
在汽车转向时,如果后轮的侧偏角大于前轮的侧偏角时,将发生过度转向,使操纵稳定性受到破坏。
式(4-6)还表明,(α1-α2)与ay成线性关系,其斜率 为LK(如图4-9所示)。
为LK(如图4-9所示)。
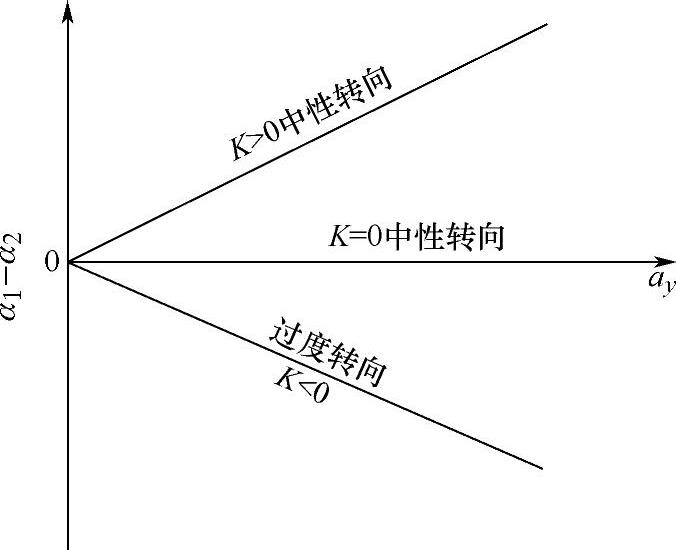
图4-9 表示汽车稳态转向特性的(α1-α2)-ay曲线

图4-10 几种汽车稳态转向特性的(α1-α2)-ay曲线
[实例]图4-10为试验测得的几种车辆的(α1-α2)-ay曲线,表明(α1-α2)值随ay变化的关系。可以看出,当侧向加速度ay大于0.3~0.4g(即3~4m/s2)以后,(α1-α2)值与侧向加速度ay一般不再成线性关系,这是因为轮胎的侧偏特性已进入明显的非线性区域的缘故。
同时还可看出,轿车的曲线斜率一般都比货车的大,曲线的线性范围也比较大,在同一侧向加速下,轿车的(α1-α2)值一般要比货车的高出许多,这说明轿车在(α1-α2)较大差值的范围均具有良好的不足转向特性,操纵稳定性比大车的要好。不少汽车处于大侧向加速度时,转向特性发生显著变化,后轮或前轮侧偏角、汽车横摆角速度发生急剧变化,以致不能再维持圆周行驶,出现转向半径迅速增大或迅速减小的情形。
(α1-α2)对转向半径R有以下影响:
为了进一步说明(α1-α2)与稳态响应的内在联系,下面讨论(α1-α2)值与汽车转弯半径R的关系。
前面已求得稳态横摆角速度增益为
故

将式(4-6)代入上式,得
由上式便可得到转向半径R与(α1-α2)的关系为

根据式(4-7),当前轮输入一定的转角时,转向半径就会出现以下三种情况:
①若车速很低,侧偏角可以忽略不计,我们把此时的输出半径规定为R0,那么这时(α1-α2)=0, ,汽车转向半径保持一个定值。这就是中性转向特性。
,汽车转向半径保持一个定值。这就是中性转向特性。
②车速提高后,前、后轮产生了侧偏角,这时若(α1-α2)>0,则有R>R0,这表明汽车的转向效果受到了抑制。由于(α1-α2)将随侧向加速度的增大而增大,因此这种抑制作用也将随ay的增大而增强,致使转向半径越来越大。这就是不足转向特性。
③若α1-α2<0,情况则相反,则有R<R0,这表明汽车的转向效果得到了加强,而且这种加强作用将随着侧向加速度的增大而增强,致使转向半径越来越小。这就是过度转向特性。
基于前、后轮侧偏角之差值(α1-α2)对转向稳定因数K和转弯半径R均有着直接影响的作用,因此它也可以作为汽车稳态响应的评价指标。
2)转向半径之比值R/R0。当汽车以较低速度作等速曲线行驶时,汽车的侧向加速度接近于零,这时前、后轮的侧偏角也可以认定为零。在这种工况下,转向半径R0=L/δ为定值。当汽车加速时,则存在具有侧偏角下的转向半径R。这两种工况下的转向半径之比R/R0也是表征汽车稳态响应的一个参数。
下面推导R/R0与稳定性因数K的关系。
汽车转向半径为

故

①当K=0时,则 ,汽车呈现中性转向特性,转向半径始终为一定值R0,不随车速发生变化。
,汽车呈现中性转向特性,转向半径始终为一定值R0,不随车速发生变化。
②当K>0时,则 ,汽车呈现不足转向特性,转向半径总是大于R0,并且随车速的提高而增大。
,汽车呈现不足转向特性,转向半径总是大于R0,并且随车速的提高而增大。
③当K<0时,则 ,汽车呈现过度转向特征,转向半径总是小于R0,并且随车速的提高而减小。
,汽车呈现过度转向特征,转向半径总是小于R0,并且随车速的提高而减小。
图4-11a是根据式(4-8)计算画出的R/R0与u2的关系曲线,表明了三种稳态转向特性与R/R0比值的关系。
[实例]图4-11b为试验求得的北京旅行车公司一轻型客车(ISUZU-WFR)的R/R0与ay的关系曲线。从图上可知,汽车的转向半径R/R0的比值随侧向加速度ay的增大而增大。在ay为0~3m/s2的范围内,转弯半径增大缓慢;但在ay>3m/s2后,R增大较快。
图4-12a为日本Motor Fan杂志所作的道路试验报告给出的Santana Xi5轿车在不同侧向加速度ay下的K值曲线。曲线表明,侧向加速度在0.1~0.7g如此宽的范围内,K值只在0.003~0.004之内变化,说明该车在转向时的不足转向特性较稳定。

图4-11 汽车转向半径比R/R0与车速u2、ay的关系
图4-12 不同ay下的K值
a)Santana Xi5轿车的K值随侧向加速ay变化的曲线 b)BenzE320轿车的K值随侧向加速度ay变化的曲线
图4-12b为1996年日本Motor Fan杂志给出的Benz E320轿车的K值随侧向加速度ay变化的曲线。曲线表明,该轿车侧向加速度在0.25~0.6g的范围内,K值的变化量极小,几乎可以看成是一个定值(0.002),说明该车在转向时的不足转向特性很稳定。图中的阴影部分是在前四年中测得的该轿车K值曲线变化范围。
3)静态储备系数SM——(a′-a)/L比值。它能使前、后轮产生同一侧偏角的侧向力作用点称为中性转向点(Cn)。设a′为前轴至中性转向点的距离,中性转向中心的位置a′可通过力矩平衡来求得,见图4-13。
当侧向力作用于中性转向点时,则有前、后轮相同的侧偏角,即
α1=α2=α
前、后轮的侧偏力分别为
FY1=k1α
FY2=k2α
通过力矩平衡,得出a′的位置为
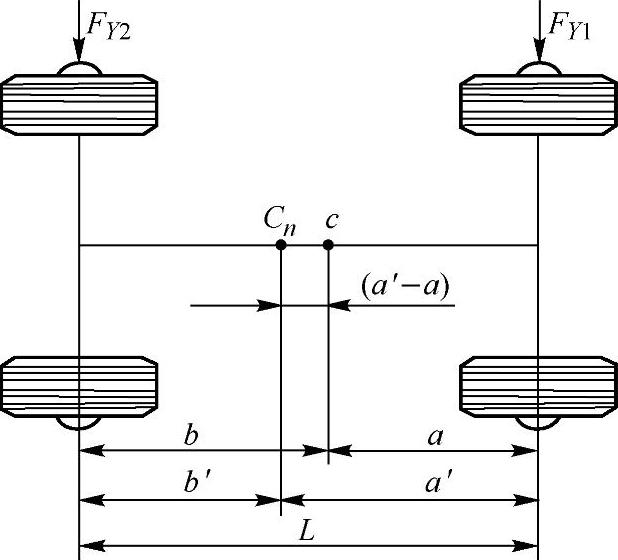
图4-13 汽车的中性转向点Cn
我们把汽车的中性转向点至前轴的距离a′和质心至前轴的距离a之差(a′-a)与轴距L的比值(a′-a)/L称为静态储备系数SM,则有

式(4-9)表明,静态储备系数(a′-a)/L仅与汽车的前、后轮胎的侧偏刚度以及车身的几何参数有关,是汽车本身所固有的特性,可以用作表征汽车稳态转向特性。具体如下:
①当(a′-a)/L=0时,必有a′=a,这表示汽车质心与中性转向点重合,作用在质心上的侧向力引起的前、后轮的侧偏角相等,即α1-α2=0,汽车具有中性转向特性。
②当(a′-a)/L>0时,必有a′>a,这表示汽车质心位置相对于中性转向点前移,作用在质心上的侧向力引起的前轮侧偏角大于后轮侧偏角,即α1-α2>0,汽车具有不足转向特性。
③当(a′-a)/L<0时,必有a′<a,这表示汽车质心位置相对于中性转点后移,作用在质心上的侧向力引起的前轮侧偏角小于后轮侧偏角,即α1-α2<0,汽车具有过度转向特性。
注意:以上所述侧偏角α值均为绝对值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。