



利用β线与I曲线的配合,就可以分析前、后制动器制动力具有固定比值的汽车在不同φ值路面上的制动情况。分析的目的在于了解不同φ值路面对制动过程所产生的影响。
为了便于分析,首先介绍两组线组——f线组与r线组。f线组是后轮没有抱死,在不同φ值路面上前轮抱死时的前、后轮地面制动力关系曲线;r线组是前轮没有抱死,而后轮抱死时的前、后轮地面制动力关系曲线。汽车制动时,其中一车轴先抱死是常见现象,随后才是两车轴都抱死。例如普通轿车,随着制动踏板力的逐渐加大,常有后轮没有抱死而前轮先抱死这样的过程;又如有的空载货车,随着制动踏板力的逐渐加大,常有前轮没有抱死而后轮先抱死这样的过程。为什么会出现这种状况呢?主要原因在于“分配比例”是固定的,但路面的附着条件却千变万化,各车轴的制动效果也随之发生变化。
1.求f线组与r线组
(1)求f线组f线是描述只有前轮抱死时的前、后轮地面制动力的关系曲线。每一种φ值路面都有一根f线,几种不同φ值路面的f线便组成了f线组。f线组是根据下面的关系式绘制的。
前轮抱死的条件是:前轮地面制动力FXb1等于前轮附着力φFZ1,即
因为FXb=FXb1+FXb2,将此式代入上式,经整理得出:汽车在不同φ值路面上只有前轮抱死时的前、后轮地面制动力的关系式为

显然,当前、后轮都抱死时,式(3-14)亦成立,只是此时的后轮地面制动力亦已达到后轮附着力的数值。
以不同φ值代入式(3-14)作图,便得到f线组,如图3-39a所示。
下面来解读f线组:
1)f线组与纵坐标的交点为 ,表明无论φ取任何值,f线组永远经过该点,即此交点与φ值无关。FXb2为负值时已是地面驱动力。
,表明无论φ取任何值,f线组永远经过该点,即此交点与φ值无关。FXb2为负值时已是地面驱动力。
2)f线组与横坐标的交点依次为a、b、c、…,这些交点表明在后轮地面制动力FXb2=0的情况下,不同φ值路面所对应的前轮地面制动力FXb1的大小,即 。在这些点的情况下,总地面制动力只等于前轮地面动力,即
。在这些点的情况下,总地面制动力只等于前轮地面动力,即
FXb=FXb1+0=FXb1<φG
3)当f线越过交点a、b、c…以后,后轮地面制动力FXb2比前轮的FXb1增加得快。随着地面总制动力FXb的增加,最后f线与I曲线相交,在交点处后轮才达到抱死。交点处的FXb1+FXb2=Fφ1+Fφ2=φG(这也就是前、后车轮同时抱死的条件)。
4)f线与I曲线相交已表明前、后轮在此处己达到了都抱死的最佳制动效果,I曲线以上的f线段已无意义,不再去探讨。
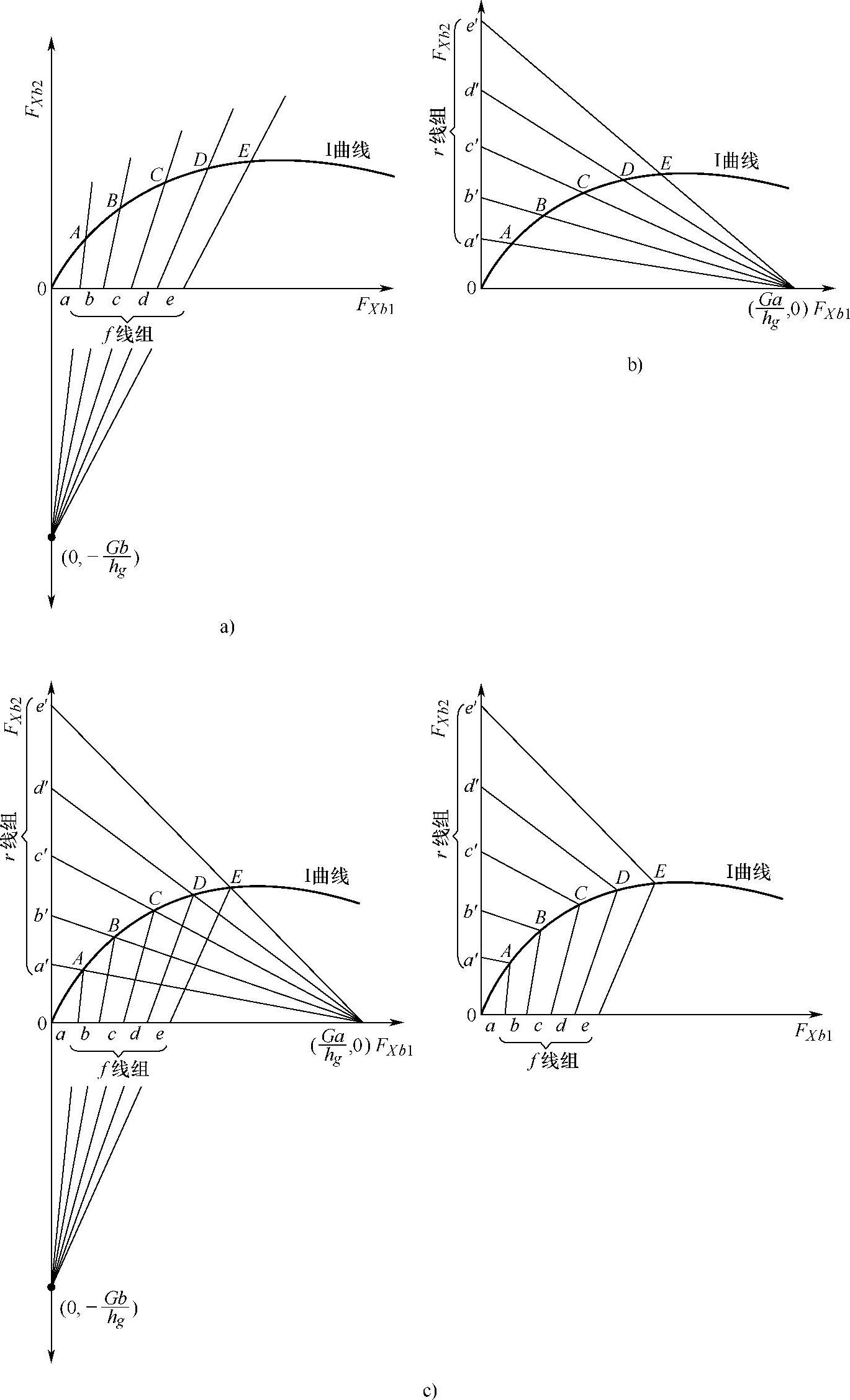
图3-39 f线组与r线组的绘制
a)f线组 b)r线组 c)f线组与r线组组合
(2)求r线组r线是描述只有后轮抱死时的前、后轮地面制动力的关系曲线。r线组是根据下面的关系式绘制的。
前轮抱死的条件是:后轮地面制动力FXb2等于后轮附着力φFZ2,即
将FXb=FXb1+FXb2代入,经整理得出:汽车在不同φ值路面上只有后轮抱死时的前、后轮地面制动力的关系式为
 (https://www.xing528.com)
(https://www.xing528.com)
显然,当前、后轮都抱死时,式(3-15)亦成立,只是此时的前轮地面制动力亦已达到前轮附着力的数值。
以不同φ值代入式(3-15)作图,即得到r线组,如图3-39b所示。
下面来解读r线组:
1)r线组与纵坐标的交点为 ,表明无论φ取任何值,r线组永远经过该点,即此交点与φ值无关。
,表明无论φ取任何值,r线组永远经过该点,即此交点与φ值无关。
2)r线组与纵坐标的交点依次为a′、b′、c′…,表明在前轮地面制动力FXb1=0的情况下,不同φ值路面所对应的后轮地面制动力FXb2的大小。在这些点的情况下,总地面制动力只等于后轮地面制动力,即FXb=0+FXb2<φG。
3)在r线的交点a′、b′、c′…以下,随着FXb2的稍稍减小与相应的FXb1的增大,FXb也增大,最后r线与I曲线相交,在交点处前轮才达到抱死。交点处的FXb1+FXb2=Fφ1+Fφ2=φG
4)r线与I曲线相交已表明前、后轮在此处己达到了都抱死的最佳制动效果,所以I曲线以上的r线段已无意义,不再去探讨。
把f线组和r线组绘制在一起便得到如图3-39所示式样。
从图3-39可见,对于同一φ值的f线与r线的交点A、B、C、…既符合FXb1=φFZ1,又符合FXb2=φFZ2,所以这些交点便是前、后车轮都抱死(也包含同时抱死)的点。因此,连结A、B、C、…各点的曲线也就是前面所述的I曲线。
2.利用“四线”来分析不同φ值路面上的制动过程
下面,利用β线、I曲线、f和r线组来分析汽车在不同φ值路面的制动过程。参看图3-40,为了便于说明问题,以早期生产的ГAЗ-51货车为例,其同步附着系数为φO=0.39。图中还画上了FXb1与FXb2之和为0.1g或0.2g或0.3g…的45°斜直线组。同一根斜直线上的点均有同样大小的总地面制动力FXb,相应的制动减速度也是常数,即为0.1g或0.2g或0.3g…。故此45°斜直线组称为“等地面制动力线组”或“等制动减速度线组”。分析制动过程时,常利用此线组来确定制动过程中的总地面制动力与制动减速度 的数值。
的数值。
(1)φ<φO时,总是前轮先抱死 假设φ=0.3,则制动开始时,前、后制动器制动力Fμ1、Fμ2按β线上升;因前、后车轮均未抱死,故地面地面制动力FXb1、FXb2也按β线上升。到了A点时,β线与φ=0.3的f线相交,前轮开始抱死,制动减速度为0.27g,此时的地面制动力FXb1、FXb2已符合后轮没有抱死而前轮先抱死的条件。若驾驶人继续增加踏板力,FXb1、FXb2将沿这条f线上方变化,前轮的地面制动力FXb1不再等于前制动器制动力Fμ1反而略大于Fμ1,略大的原因是由于继续制动引起汽车质心位置前移量增加、前轮地面法向反力增加所致。但因后轮尚未抱死,所以随着踏板力的增加,Fμ1、Fμ2沿β线上升,FXb2仍然等于Fμ2而继续上升。当FXb1、FXb2升至A′时,这条f线与I曲线相交,此时后轮才达到抱死所需要的地面制动力(亦即后轮的附着力),于是前、后车均抱死,汽车获得的减速度为0.3g。
由上述可见,β线位于I曲线下方(φ<φO),制动时总是前轮先抱死。
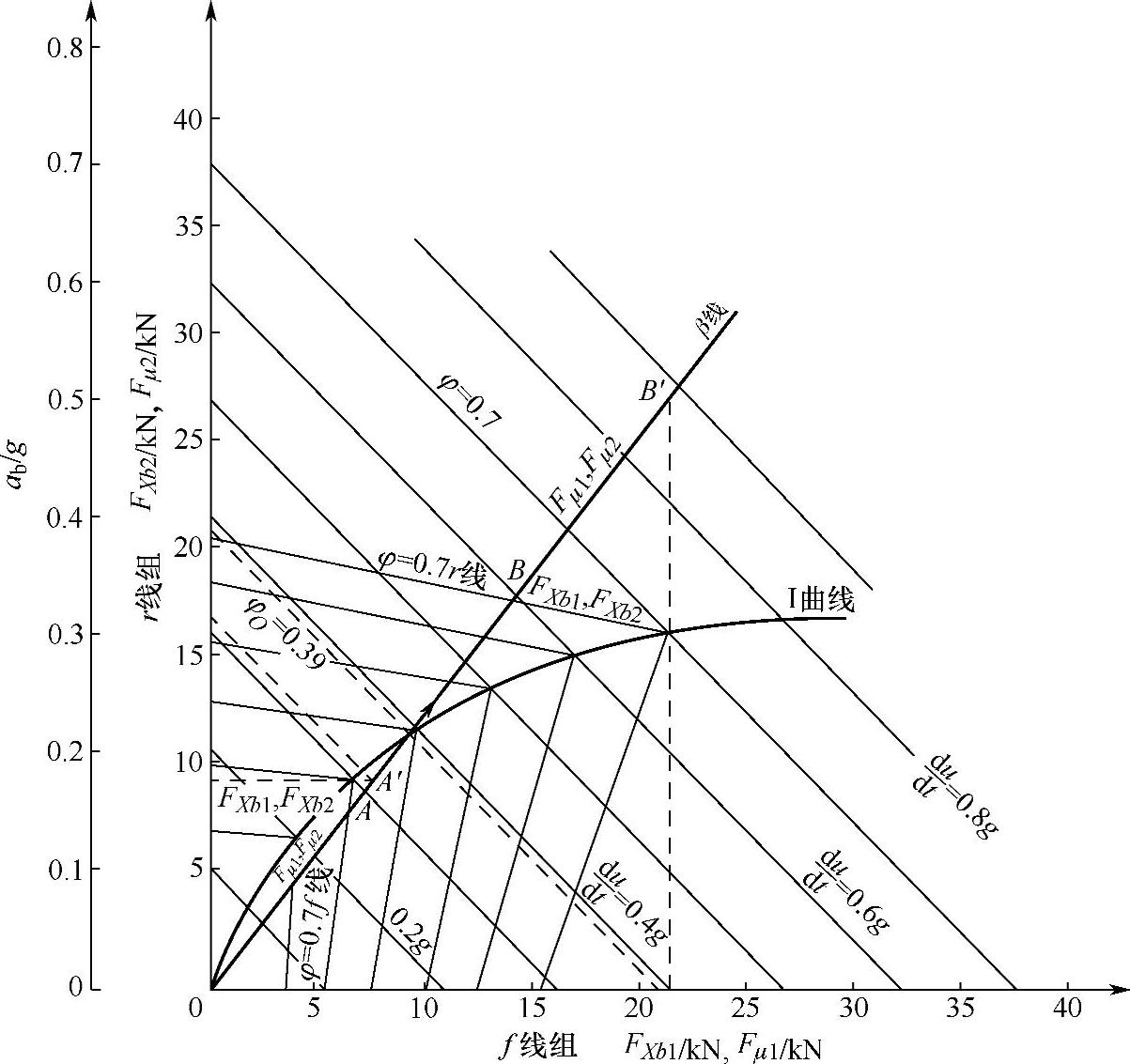
图3-40 在不同φ值路面上汽车制动过程的分析
(2)φ>φ0时,总是后轮先抱死 假设φ=0.7,则制动开始时,前、后车轮均未抱死,故前、后车轮地面制动力和制动器制动力均按β线增长。到达B点时,β线与φ=0.7的r线相交,地面制动力FXb1、FXb2符合后轮先抱死的条件,后轮开始抱死,此时的制动减速度为0.6g。从B点以后,再增加踏板力,FXb1、FXb2沿这r条线下方变化。但再继续增加踏板力,后轮的法向反力因质心位置前移量增加而有所减少,使后轮地面制动力沿r线略有下降。因前轮尚未抱死,当Fμ1、Fμ2沿β线继续增长时,始终存在FXb1=Fμ1。当Fμ1、Fμ2增长到B′点时,这条r线与I曲线相交,FXb1达到了前轮抱死所需求的地面制动力,于是前、后车轮均抱死,汽车获得0.7g的减速度。
由上述可见,β线位于I曲线上方(φ>φO),制动时总是后轮先抱死。
(3)φ=φO时,前、后轮同时抱死 若φ=φO,制动开始后,Fμ1、Fμ2始终沿β线增长,并保持FXb1=Fμ1和FXb2=Fμ2;继续增加踏板力,直至β线与φO=0.39的f线和r线相交,此时汽车前、后轮同时抱死,汽车获得的减速度为φOg,即0.39g。
我们把以上汽车在三种不同φ值路面的制动过程总结为:
1)当φ<φO时,β线位于I曲线下方,前轮先抱死。
2)当φ>φO时,β线位于I曲线上方,后轮先抱死。
3)当φ=φO时,β线与I曲线相交,前、后轮同时抱死。
只要φ≠φO,要使两轮都不抱死所得到的制动强度总是小于附着系数,即Z<φ。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。