



一汽大众奥迪A6L(C6)的车载网络系统主要由CAN总线、LIN总线和MOST总线组成。其CAN网由舒适CAN(100kbit/s)、驱动CAN(500kbit/s)、车距调节CAN(500kbit/s)、组合仪表CAN(500kbit/s)、故障诊断CAN(500kbit/s)和数据总线诊断接口J533(网关)组成(见图2-56)。如图2-57所示,其CAN总线系统采用中央线束连接(星形联结),所有控制单元的相关CAN总线都围绕在中心点由一个线束扎带连接在一起。线束扎带对于线路的反射很重要,因此不能拆开。
和一般设计中的数据总线两端带有两个匹配的电阻器不同,一汽大众奥迪A6L(C6)的设计使用了分散匹配电阻器,即在发动机控制单元中配备“中央匹配电阻器”和在其他控制单元中安装高阻值的电阻器。这会导致更大的反馈,但由于车辆中数据总线长度较短,不会带来负面影响。
图2-58为一汽大众奥迪A6L(C6)的舒适CAN总线系统的模块分布图,与所有CAN数据线一样,舒适系统CAN数据总线也是双绞线形式,其传输速率为100kbit/s,属低速CAN总线,具备单线运行能力。舒适系统CAN数据总线中控制单元有:车门控制单元、座 椅调节控制单元、转向柱电子控制单元、自动空调控制单元、轮胎压力监测控制单元、电能管理控制单元、辅助加热控制单元、使用和起动授权控制单元、舒适系统控制单元停车辅助 控制单元、组合仪表控制单元等。通过CAN-H线和CAN-L线,数据在控制单元之间转换,如开门/关门、车内照明灯开/关等。在CAN-L线中,为了更好地抵抗干扰以及降低用电量,与驱动系统CAN数据总线相比,有必要对其进行多种改进。首先,独立驱动器(输出放大器)的引入消除了两种CAN信号的相互依赖。与驱动系统CAN数据总线不同,舒
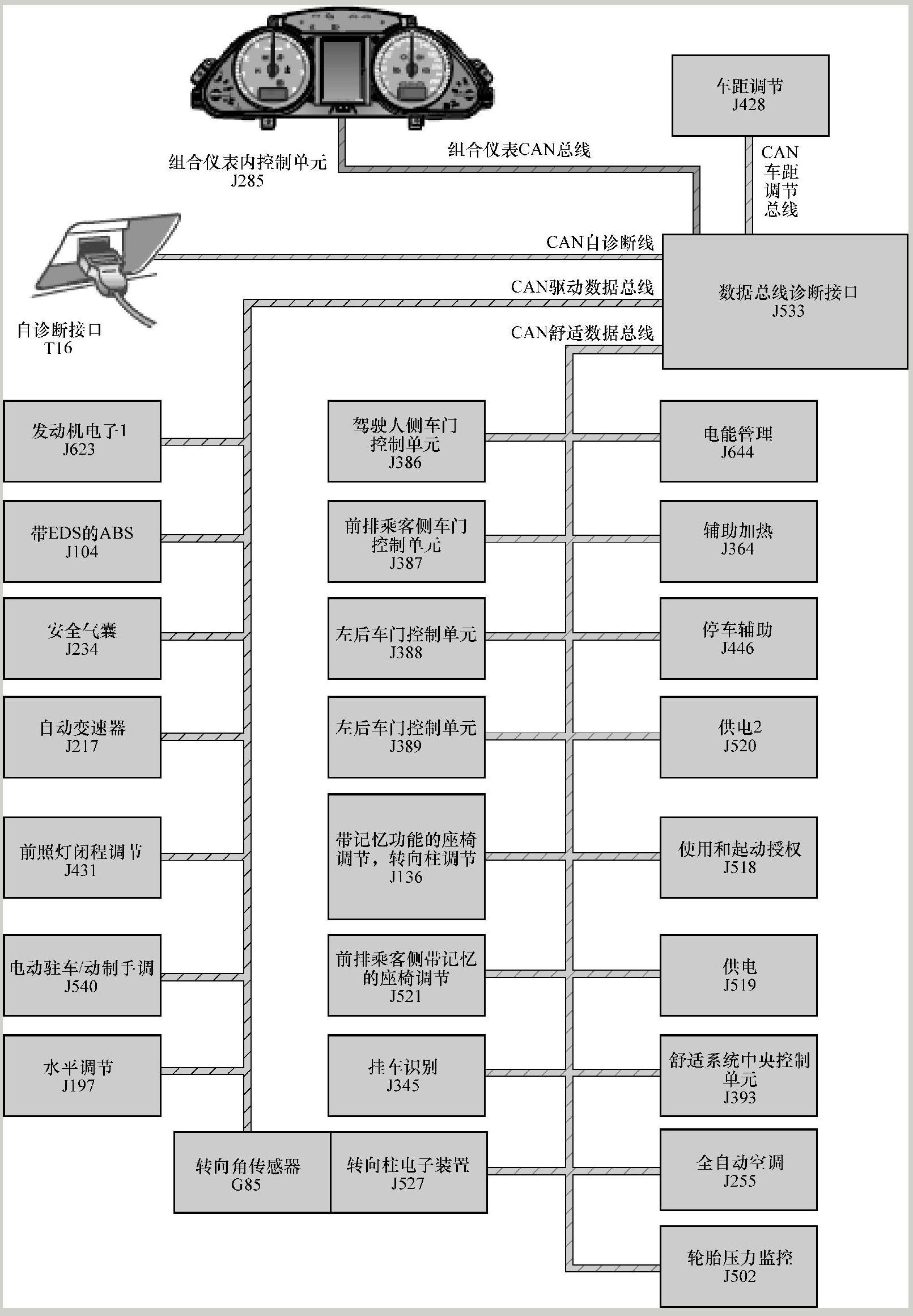
图2-56 一汽大众奥迪A6L(C6)的CAN网组成
适系统CAN数据总线的特性之一是控制单元的负载电阻不在CAN-H线和CAN-L线间,而在各自接地线或5V导线间,即没有通过电阻器相互连接。这表明CAN-H线和CAN-L线不再相互影响,而是像供电一样独立工作。如果供电断开,负载电阻也会断开,这就意味着无法再测量电阻。
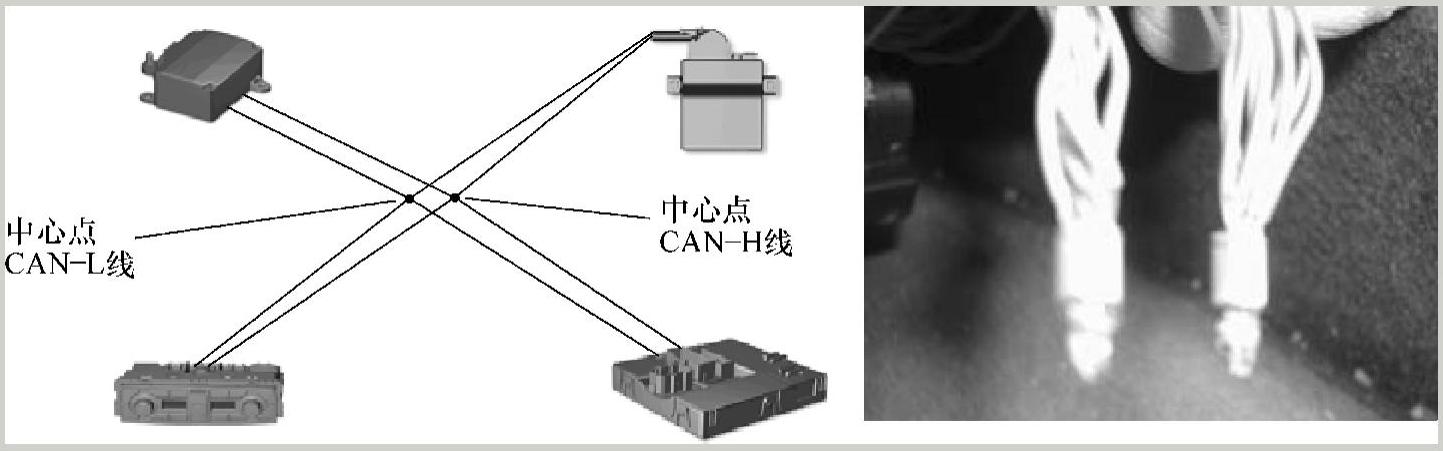
图2-57 CAN总线的星形联结
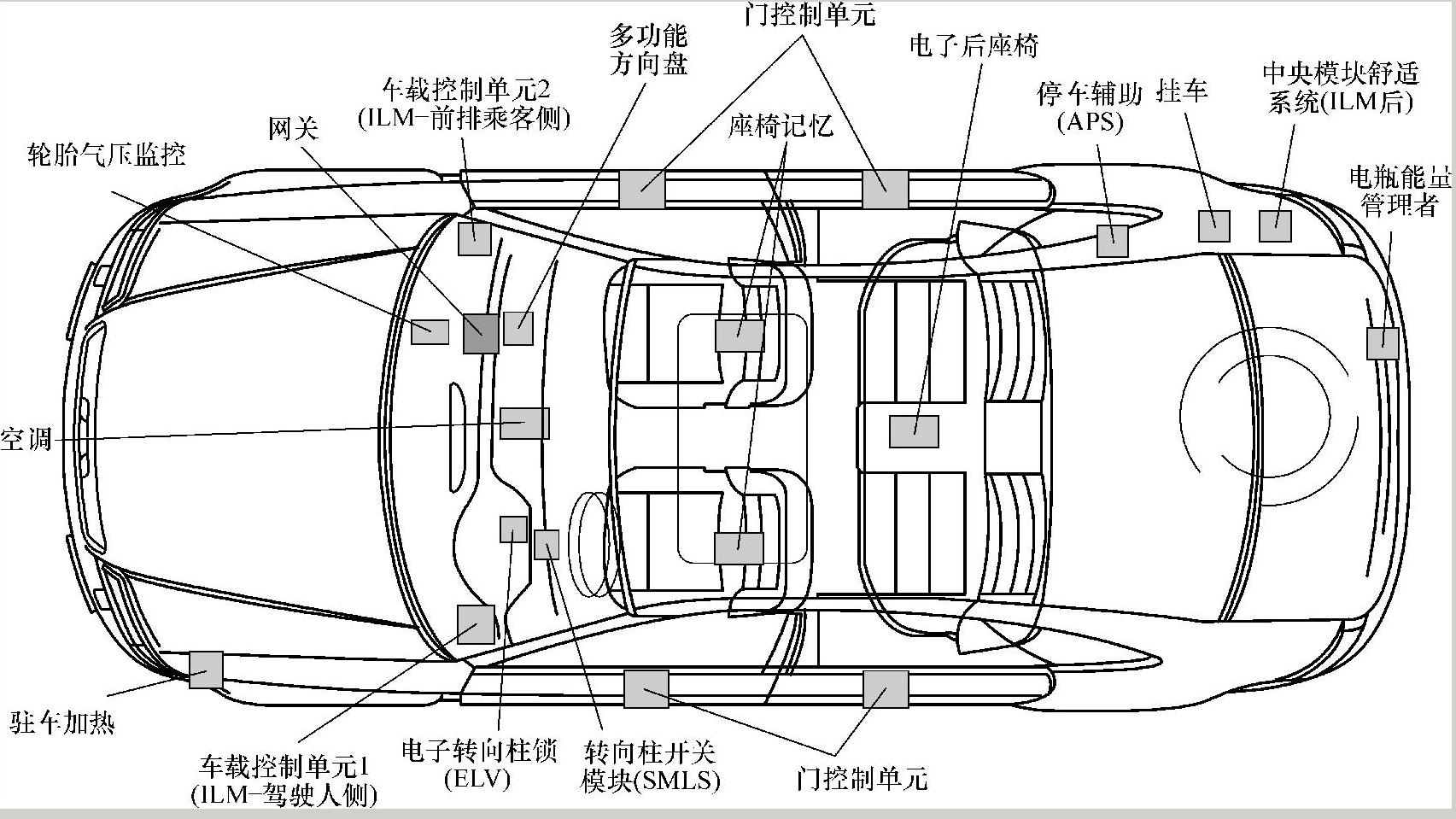
图2-58 舒适CAN总线系统的模块分布
舒适CAN总线在点火开关关闭后空载运行,此时若拔下控制单元插头,在故障存储器内会存有记录。另外,在静态电流检测时应注意舒适CAN总线工作状态。
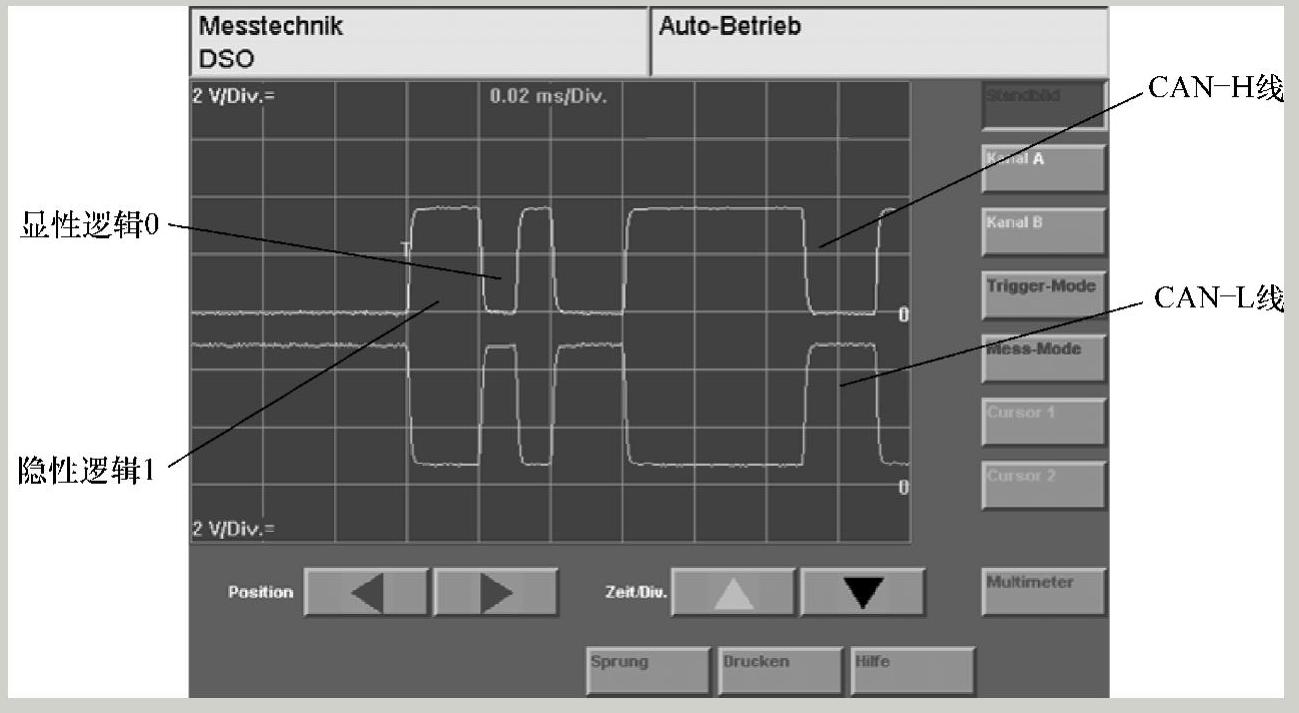
图2-59为舒适CAN总线的波形信号。为了清晰起见,将CAN-H线信号和CAN-L线信号分开。在波形信号图像(DSO)中,可以清晰看见不同的零点。CAN-H线和CAN-L线的不同测试状态清晰可见。CAN-H线信号在隐性状态时(休息状态)是0V,在显性状态时能达到甚至或高于3.6V。CAN-L线信号在隐性状态时(休息状态)是5V,在显性状态时小于等于1.4V。这样,在差动放大器中形成差动之后,隐性电平为5V,显性电平是2.2V。在隐性和显性电平之间(电压上升)的电压变化随之增加到大于等于7.2V。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-59 舒适CAN总线的波形信号
图2-60为一汽大众奥迪A6L(C6)的驱动CAN总线系统的模块分布。驱动系统CAN数据总线中控制单元有:发动机控制单元、ESP行车稳定系统控制单元、安全气囊控制单元、自动变速器控制单元、大灯照程调节控制单元、电子驻车制动控制单元、组合仪表控制单元等。驱动系统CAN数据总线是传送率为500kbit/s的双绞线,它属于高速CAN,不能单线运行,在一根线断路或短路时所有功能失效。通过驱动系统CAN数据总线的CAN-H线和CAN-L线,数据在控制单元间转换。这些信息从控制单元开始循环发送,信息的重复率一般在10~25ms。
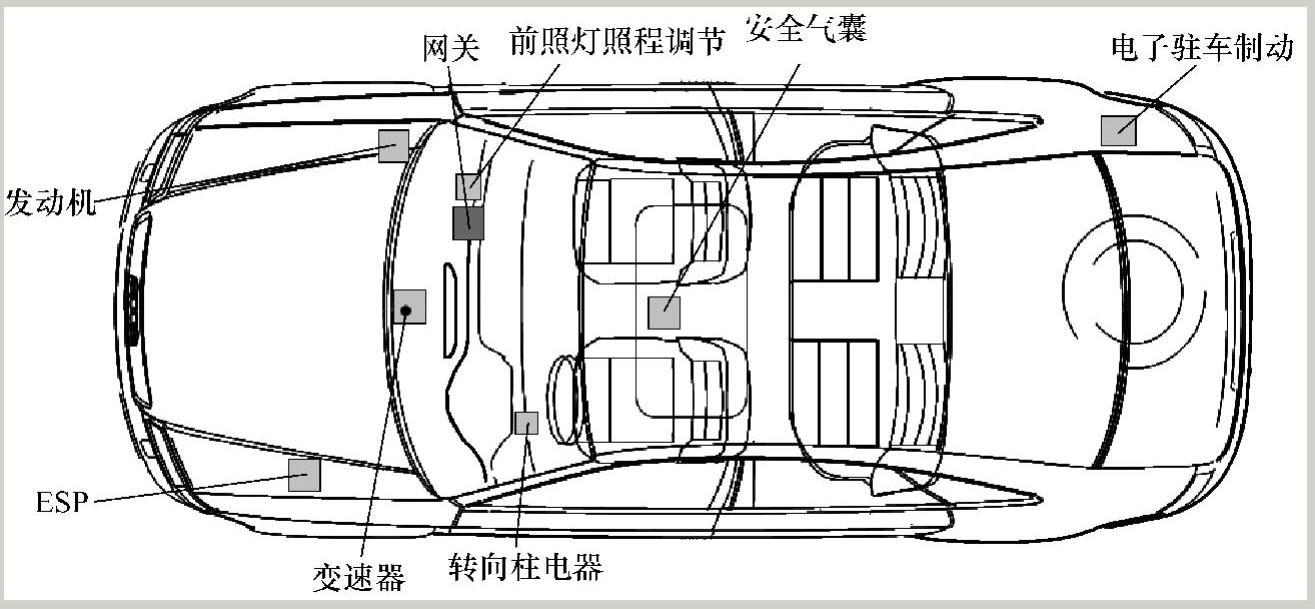
图2-60 驱动CAN总线系统的模块分布
驱动系统CAN数据总线由15号端子(点火装置)开始被激活。CAN通信在点火开关关闭后短时间内还激活。在通信中断的情况下(如控制单元插头脱落、元件的电压供给中断等),在主控制单元内产生故障存储记录,因此在重新连接后一定将要所有控制单元的故障存储清除。
图2-61为驱动CAN总线的波形信号。CAN-H线的显性电压大约为3.5V;CAN-L 线大约为1.5V。
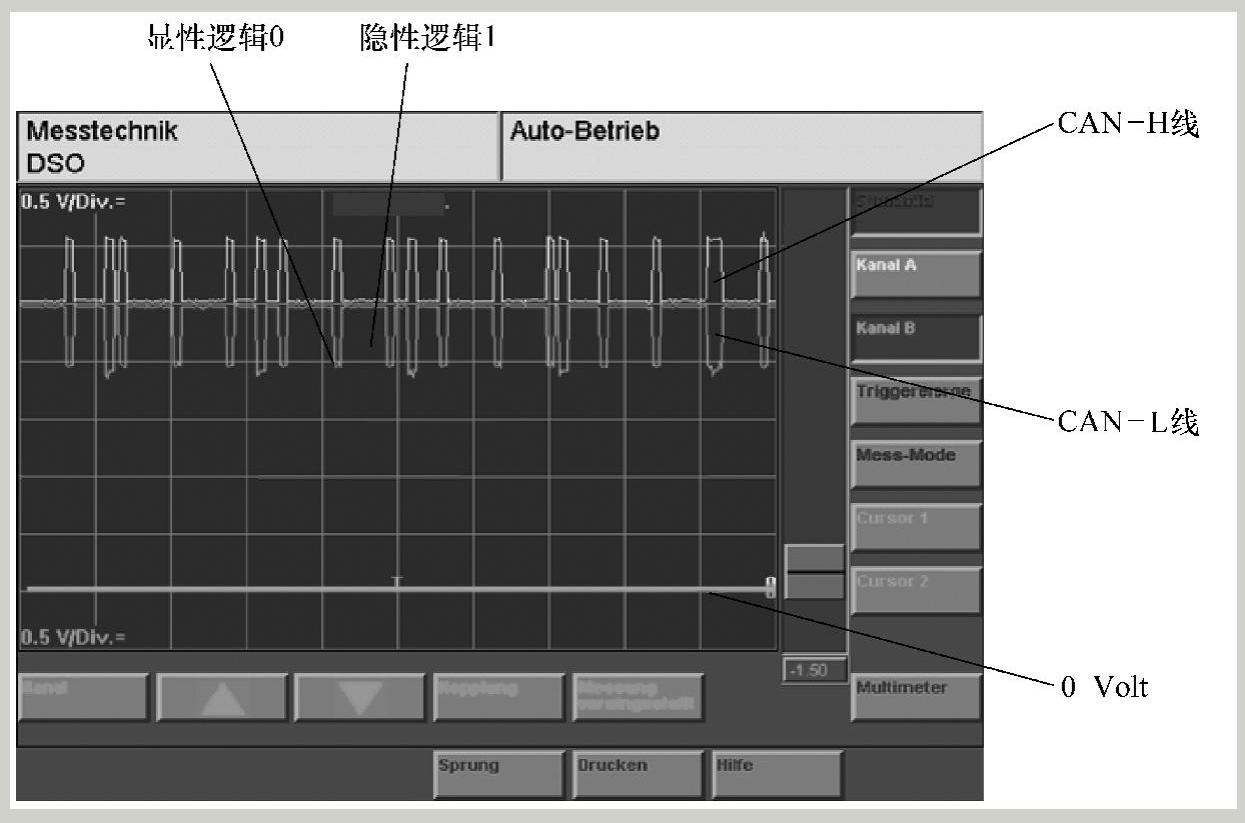
图2-61 驱动CAN总线的波形信号
车距调节CAN、组合仪表CAN、故障诊断CAN均属高速CAN,其特点与驱动系统CAN类似,速率均为500kbit/s。
数据总线诊断接口J533(网关)的安装位置在手套箱后面的模块架上(见图2-62),是整车不同总线间的接口及诊断仪和通过总线系统相连的控制单元之间的接口,作为诊断总线的主控制器,具有MOST断环诊断、驱动CAN总线休眠、总线系统的睡眠/唤醒等功能,还是元件保护的主控制器。
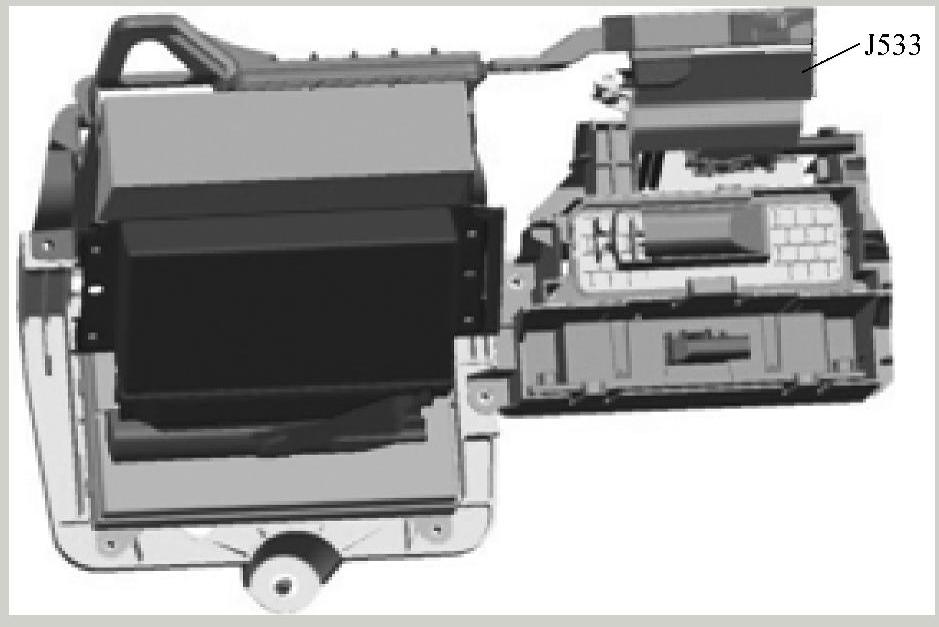
图2-62 数据总线诊断接口J533
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。