



1980年,在汽车上第一次引入了电控系统。最早得到应用的是发动机电控系统和防抱死制动系统(ABS),这些系统之间和系统对外进行数据交换时,早期采取点对点连接形式,通过模拟信号或简单的电信号来实现。此后不久,汽车制造商们一致认为必须制订一套统一的数据通信解决方案,BOSCH公司作为欧洲汽车电控系统制造商之一,带头承担了这个任务。
1983年,丰田公司在世纪牌汽车上最早采用了应用光缆的车门电控系统,实现了多个控制单元的连接通信。该系统采用了集中控制的方法,车门控制单元(ECU)可对各个车门的门锁、玻璃升降进行控制,这是早期在汽车上采用的光缆系统,可被看作是最早的车载网络系统。
1986年至1989年,汽车的车身电气系统中装用了以铜线作为网线连接的车载网络系统。例如,日产公司的车门多路传输控制系统、通用公司的车灯多路传输控制系统等,均投入了批量生产。在此期间,一些车载网络系统的标准也纷纷推出。
1986年2月,BOSCH公司在美国汽车工程师协会(SAE)大会上介绍了一种新型的串行总线———控制器局域网(ControllerAreaNetwork,CAN)。随后,美国汽车工程师协会(SAE)提出了J1850。此后,日本也提出了各种各样的网络方案。并且丰田、日产、三菱和马自达等汽车制造商也都将车载网络系统投入批量生产,但没有统一为以车身电气系统为主的控制方法。而在其他国家,特别是欧洲的汽车制造商则大量采用了CAN,由于其控制系统上都可以采用CAN,从而充分证明了CAN在车载网络系统领域的先进性。而在美国,通过采用SAEJ1850普及了车载网络系统,在SAE中也通过了CAN的标准,明确表示将转向CAN。
20世纪90年代,由于集成电路技术和电子器件制造技术的迅速发展,单片机开始作为总线的接口端,采用总线技术的价格逐步降低,总线技术进入了实用化阶段,车载网络的时代开始了。
2000年,欧洲以与CAN协议不同的思路提出了控制系统的新协议———基于时间触发的协议(TimeTriggeredProtocol,TTP),并在X-by-Wire系统上开始应用。在此对X-by-Wire适当加以说明,对于飞机的控制系统来说,有一个词组为Fly-by-Wire,直译为线控飞行系统,它表示飞机的控制方式,即将飞行员的操纵和操作命令转换成电信号,利用计算机控制飞行的工作方式。将这种操作方式引入汽车,则出现了Drive-by-Wire系统,直译为线控驱动系统。在汽车上类似的系统还有Steering-by-Wire(线控转向)系统、Brake-by-Wire(线控制动)系统,将这些系统统称为X-by-Wire系统。
与这些网络采用不同思路开发的是汽车信息系统,该系统在开关、显示设备之间建立网络,利用光纤将显示信息进行传递。为了实现音响系统的数字化,建立了将音频信号与信息系统综合在一起的AV网络。为了满足大容量数据连续输出,这种网络采用了光缆。当对汽车引入智能交通系统(ITS)时,由于要与车外交换数据,所以在信息系统中将会采用更大容量的网络,于是出现了DDB协议、MOST及IEEE1394等。表1-1为常见汽车车载网络系统的开发年份、采用厂家等。
表1-1 常见汽车车载网络系统的开发年份、采用厂家等(https://www.xing528.com)
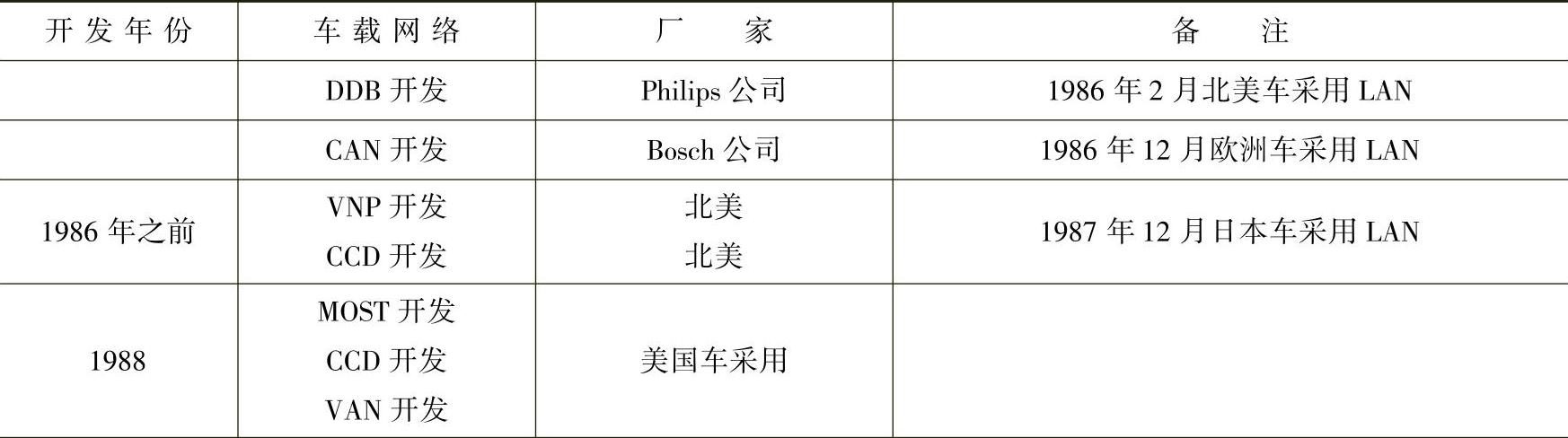
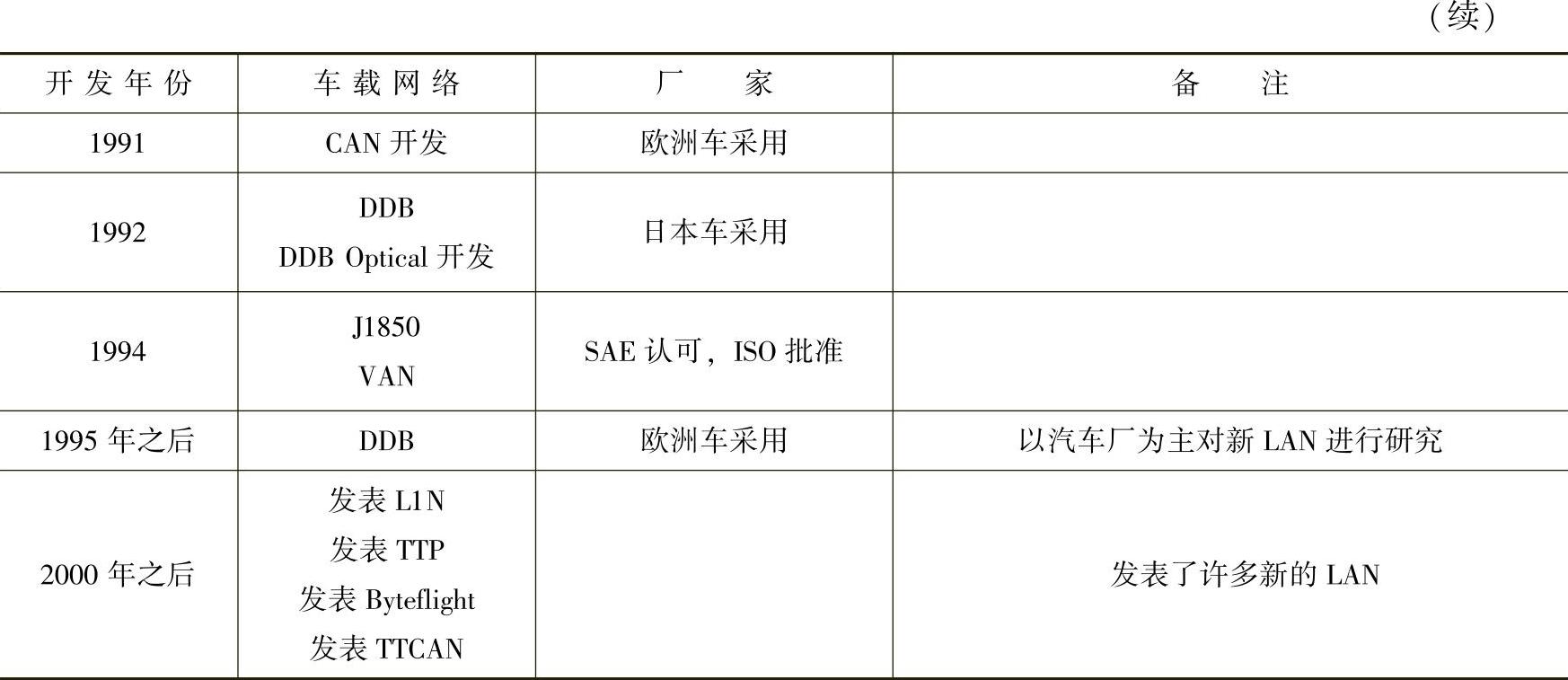
随着汽车电子技术的发展,车载网络系统变得越来越复杂,导致现在的新车型上要采用多个互联的总线系统组成网络。为了控制这种复杂的车载网络系统,降低成本,汽车制造商将被迫去寻找对总线系统和数据交换所采用的协议标准化的解决方案。表1-2为目前主要车载网络系统的基本情况。
表1-2 目前主要车载网络系统的基本情况
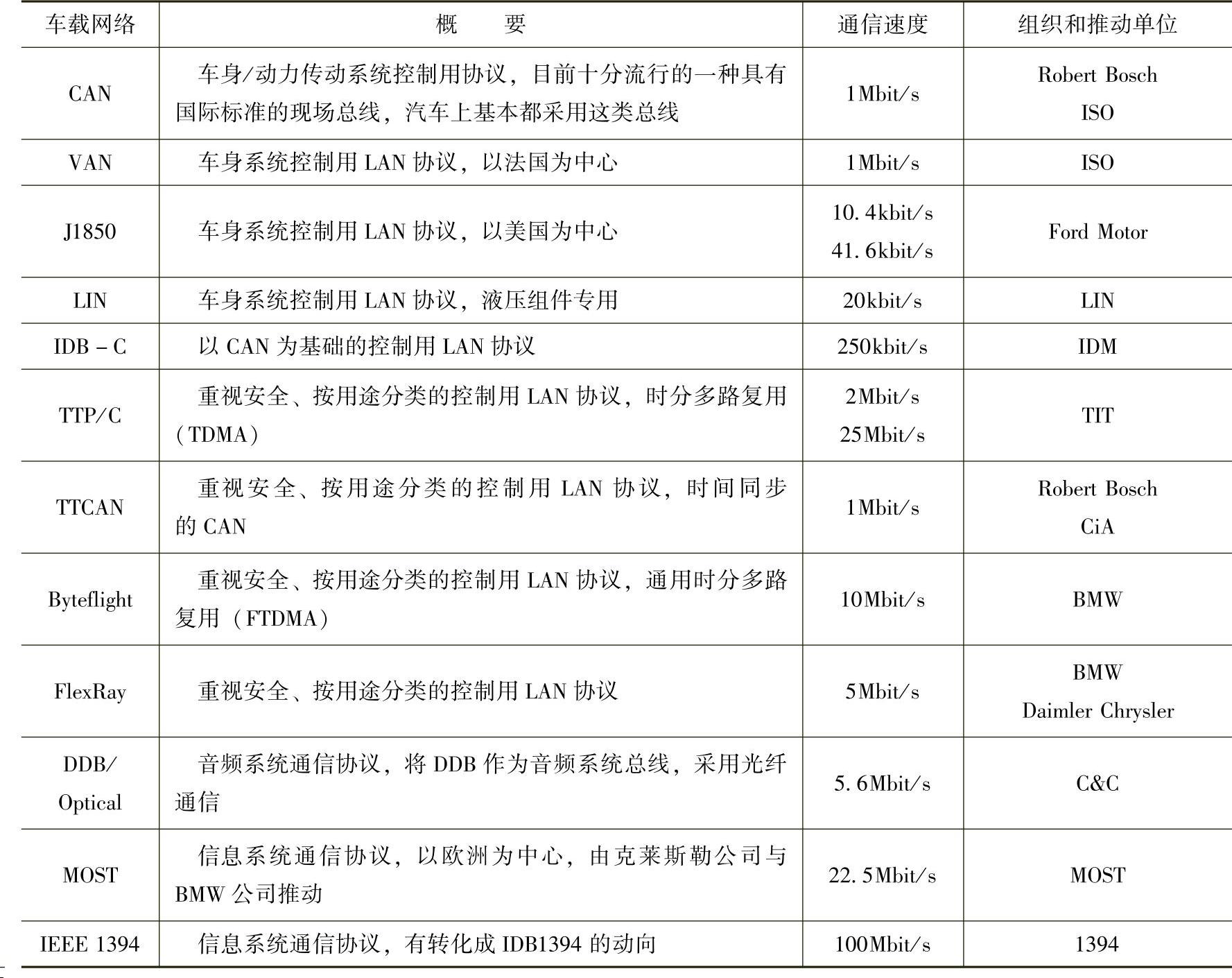
在未来,由于大量数据需要交换和处理,车载网络系统迫切需要频带更宽的总线。CAN总线将在一段时间内继续充当车载网络系统的统治角色,采用一种LIN、CAN和FlexRay混合的协议方案正成为趋势,而MOST和ByteFlight也将在信息娱乐网络和安全网络中占据一席之地。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。