



1.系统及其部件
带有连续减振控制(CDC)的完全承载式四角空气悬架(4CL)可以使车辆保持恒定的离地高度,而不管有效载荷为多少。换句话说,在路面和车辆底盘之间保持着恒定的静态离地间隙,该间隙由驾驶人的输入或车速决定。
整个系统包括(如图7-55和图7-56所示):一个4CL/CDC的控制单元、每个角有一个空气弹簧和一个车辆高度传感器、每个角有一个集成在空气弹簧支柱中的可调减振器、一个带有空气干燥器和温度传感器的压缩机、一个带有4个阀、一个排放阀、一个储压阀的电磁阀体,其上有一个集成式压力传感器,储压器、压缩机到各个空气弹簧支柱与储压器的空气管路、各个空气弹簧支柱上各有一个车轮加速度传感器(测量范围±13g),以及三个车身加速度传感器(测量范围±1.3g)。
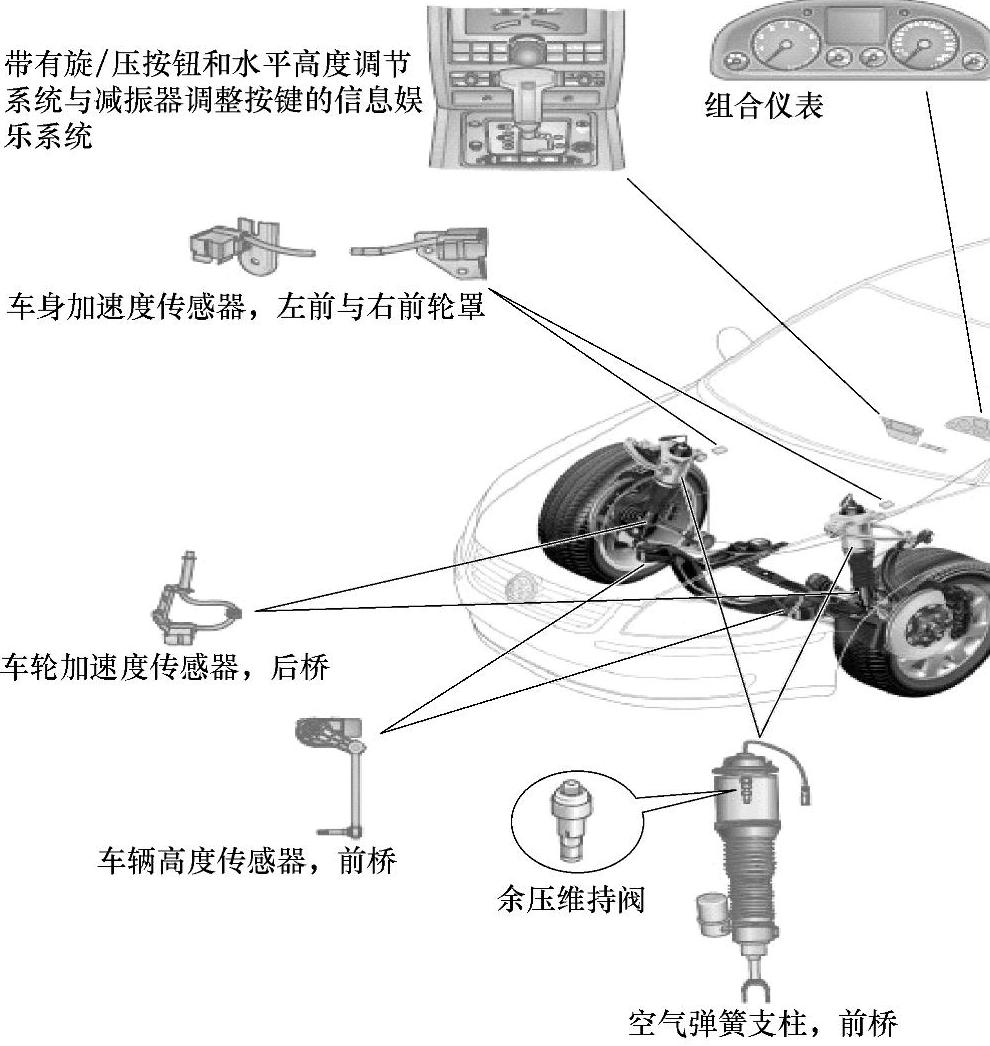
图7-55 系统部件
辉腾可实现三个高度的调节:正常悬架位置(NN);高悬架位置(HN),比NN高25mm(NN和HN由驾驶人选择);用于路况较差时,低悬架位置(TN),比NN低15mm。行驶高度根据车速自动选择(在高速公路上高速行驶时),取消选择也是自动进行的。
使用特殊控制策略,该系统也可根据行驶状况自动转换到其他高度。行驶高度调整是在后台进行的,通常驾驶人不会注意到。在高速行驶时,离地间隙被自动降低,从高悬架位置降到动态性能更稳定的正常悬架位置。在速度更高的情况下,驾驶人不需选择,离地间隙就自动调整到低悬架位置上。当车速降到预定车速以下时,则自动取消低悬架位置的选择。处于“舒适”模式的减振器在高速驾驶时会自动向“运动/硬”模式调整,以确保操纵安全性与行驶稳定性。
2.操作与显示
辉腾是首次配备水平高度调节系统的大众车型。在前后桥上,该系统包括:带有水平高度调节系统的完全承载式空气弹簧和连续可调的减振器。
该系统的中央控制单元是水平高度调节系统控制单元J197。该系统由减振器调节按钮或水平高度调节系统按钮控制,其方法说明在操作手册中。
这些按键都在中央控制台上变速杆后面(图7-57)。按下相应的按键就可打开信息娱乐系统显示屏中的一个弹出菜单,然后使用旋/压按钮在两种悬架高度和四种减振器调节之间进行选择:两种悬架高度——正常悬架位置NN(预设)与高悬架位置HN;以及四个减振器调节——舒适、基本(预设)、运动1与运动2。
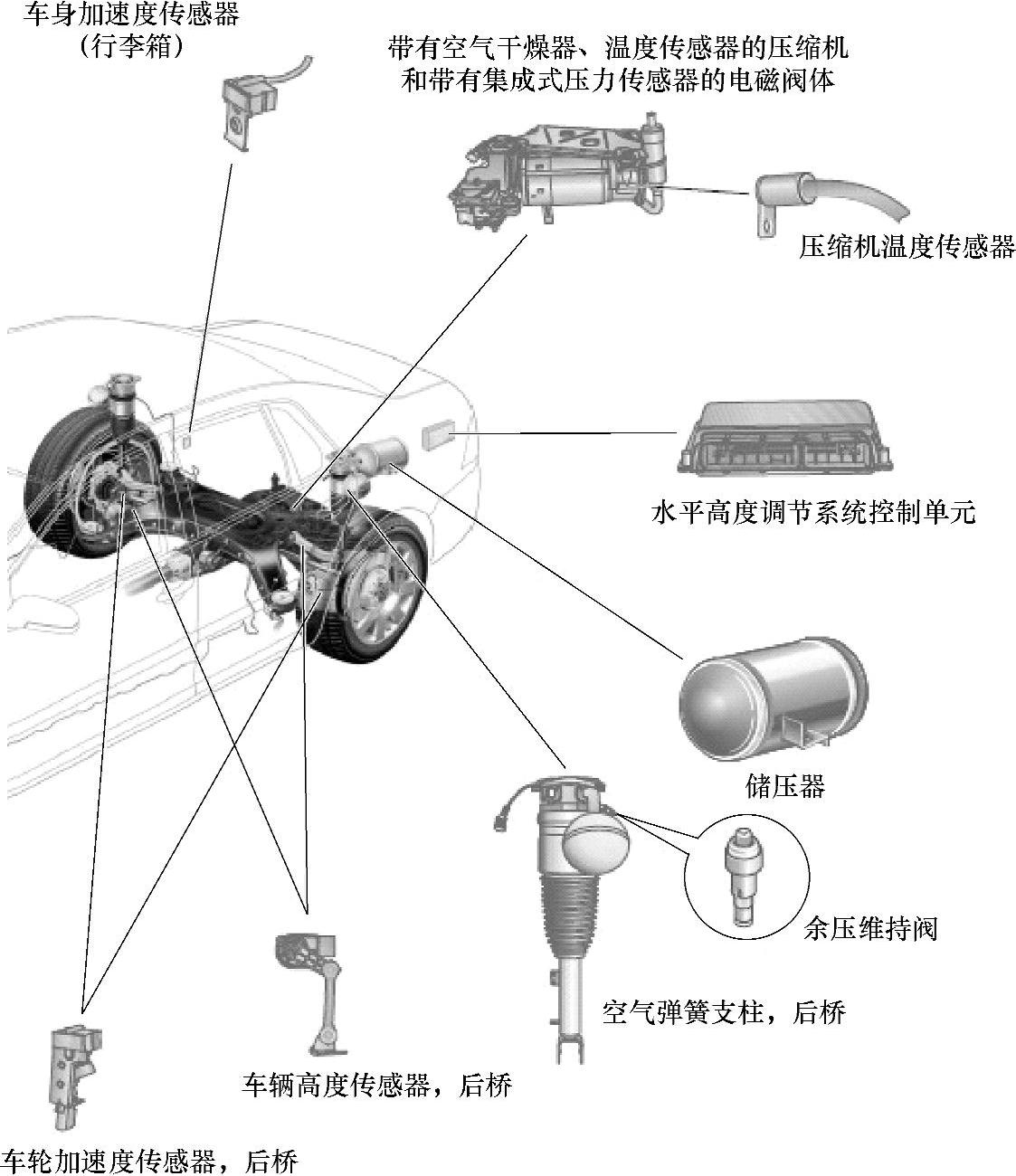
图7-56 系统部件
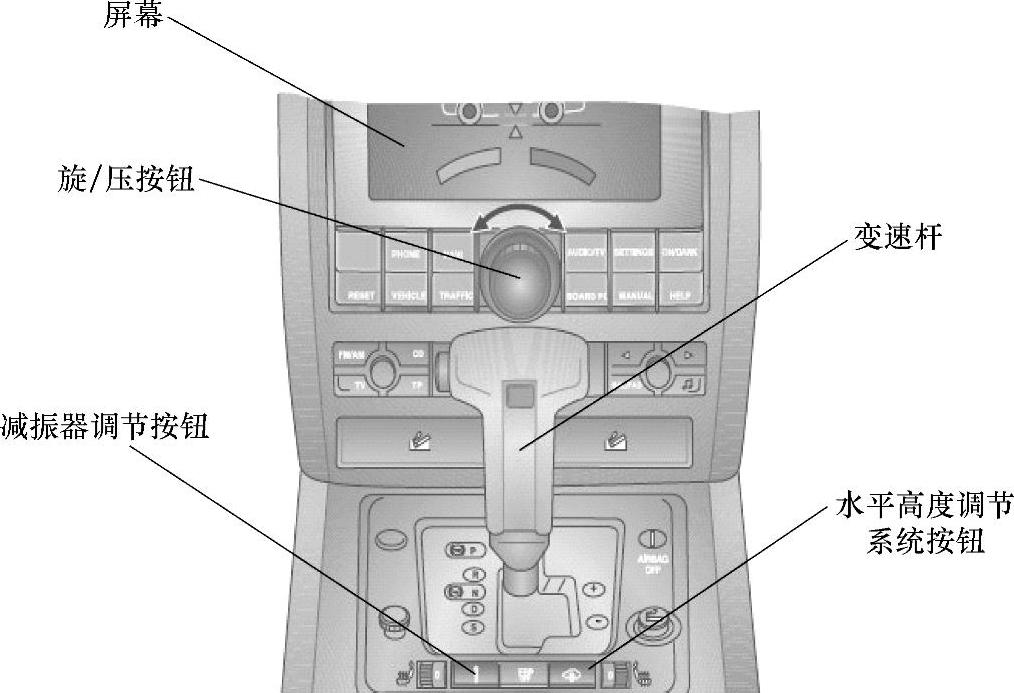
图7-57 变速杆后面控制按键
水平高度调节系统(如图7-58和图7-59所示):要设置高度必须按下水平高度调节系统按钮。转动旋/压按钮,驾驶人可以在高悬架位置HN或正常悬架位置NN之间进行选择。对应所选的高度显示在屏幕上。当设置高悬架位置后,水平高度调节系统按钮亮起。驾驶人可以按下旋/压按钮从菜单中退出。

图7-58 正常位置

图7-59 高位置
减振器调节(如图7-60和图7-61所示):按下减振器调节按钮就可对减振器调节进行选择。按下旋/压按钮后,驾驶人可退出该菜单。在舒适、运动1与运动2的设置中,按键是亮起的(当点火开关关闭后“运动2”位置高度总是恢复到“基本”位置高度)。转动旋/压按钮,驾驶人可从下列四种减振器调节方式中进行选择:舒适、基本(预设)、运动1与运动2屏幕出现相应的显示。
 (https://www.xing528.com)
(https://www.xing528.com)
图7-60 舒适

图7-61 运动2
水平高度调节系统的控制策略(如图7-62所示):位于桥壳与下部叉形杆之间的四个车辆高度传感器测量车身相对车轮的位置,然后与存储在控制单元中的各个车轮的默认值进行比较。车辆控制单元必须“学习”这些默认值。在正常情况下,水平高度调节过程中所需的空气是由压缩机提供的(最大压力16bar)。当车速大于35km/h时,由压缩机控制调节。储压器也会按照需要充满。当车速小于35km/h时,由储压器(5L容量)控制调节。要进行调节时,储压器与空气弹簧之间需要有足够的压力差(大约3bar)。
加载与卸载:在加载或卸载过程中,若车辆高度与地面的相对高度发生变化,该控制单元则重新调节车辆高度到标准高度。在此调节过程中,空气经过电磁阀送入空气弹簧或经排放阀排出。
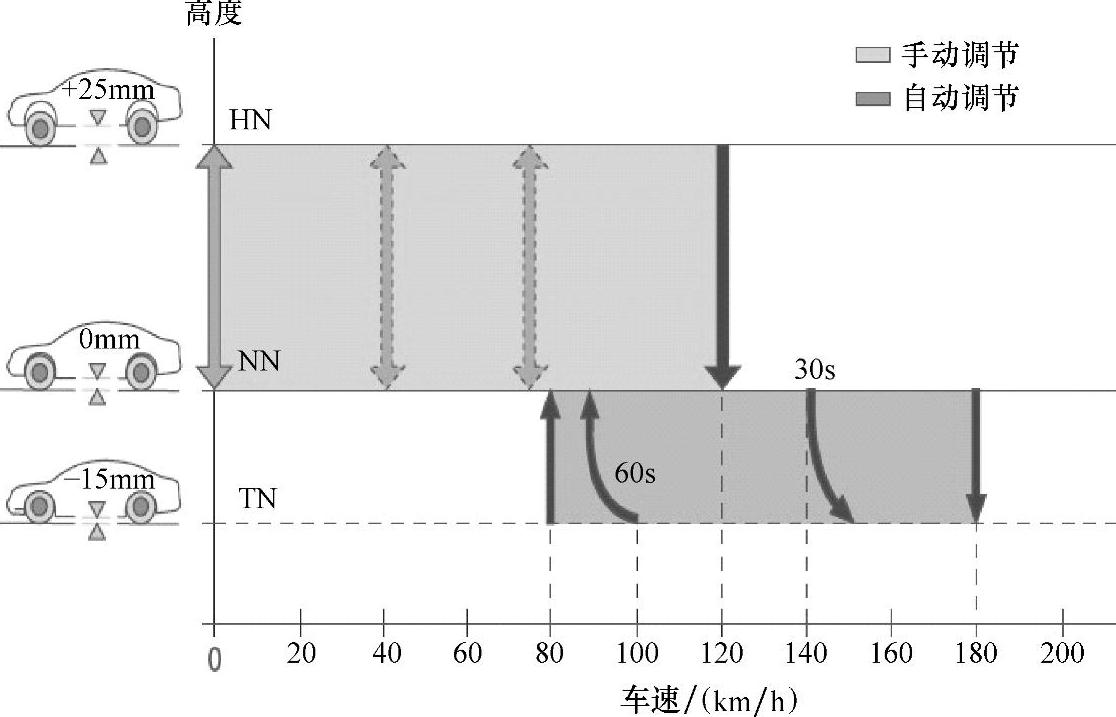
图7-62 自动上/下调节工作示意图
HN—高位 NN—正常位 TN—低位
高度自动降低,HN到NN:车速为120km/h。NN到TN:在车速达到140km/h时30s后开始和/或车速达到180km/h后立即开始。
高度自动增加,TN到NN:在车速达到100km/h时60s后开始和/或车速达到80km/h后立即开始。
3.水平高度调节系统的特殊模式
解除水平高度调节系统:在特殊情况下,例如更换轮胎或者在将车辆升起后进行工作时,必须解除此悬架功能。按下水平高度调节系统与减振器调节按键大约5s后,水平高度调节系统功能立即解除。组合仪表上出现一个消息,表明水平高度调节系统功能已经解除。
启用水平高度调节系统:同时按下这两个按键大约5s后,该悬架系统就重新启用,或者当控制单元判断出车速达到10km/h时自动启用。
举升平台:当车辆用千斤顶或举升器顶起时,空气从四个空气弹簧中逸出,直至控制单元判断出车辆处于升起状态。当水平高度调节系统检测到车身相对车轮过高时,就会让空气从弹簧中逸出以调节高度。这样,当该车从举升平台上下来后离地间隙就会非常小。在发动机与压缩机运转一段时间后,该车的高度会再次自动升至正常高度(NN)。
装载与卸载:在“点火开关OFF”之后,如果储压器中有足够的压力,该控制单元仍保持活动大约1min,并且可以进行悬架调节操作,例如进行有效载荷增加/减少时的补偿。如果没有检测到其他车门或者发动机罩/行李箱盖的操作时,此控制单元总会保持1min的活动状态。
逐渐高度变化:空气弹簧中的空气在行驶过程中受热膨胀,而在停车后又会冷缩,这会逐渐改变车辆高度,为了补偿这种高度变化,在“点火开关OFF”后可用三种调节方式来获得最佳的离地间隙。如果储压器中有足够的压力,这三种调节分别在大约2h、5h和10h之后进行。
减振器控制:减振器控制系统通过四个车轮加速度传感器和三个车身加速度传感器将路面状况和车辆的运动状况记录下来。各个减振器的特性按照减振要求的计算值来调节。在此情况下,减振器在下压与回弹的周期运动中起半主动部件的作用。连续减振控制是通过电动调整减振器特性来实现的。这些减振器都集成在空气弹簧支柱中。减振力可根据特性图用内置在减振器中的比例阀来调整设定。这样,减振力与相应驾驶状态与路面状况的适应匹配过程只需要几毫秒。该控制系统总是试图按照所谓的“天钩控制策略”来调整减振力(图7-63)。该减振器根据车轮与车身的垂直加速度大小来调节。在理想状态下,这种减振控制看上去就像车身被空中的一个钩子吊着漂浮在路面上且没有任何干扰运动。用这个办法可以获得最大的驾驶舒适性(控制作用小就可获得硬减振,控制作用大就可获得软减振)。
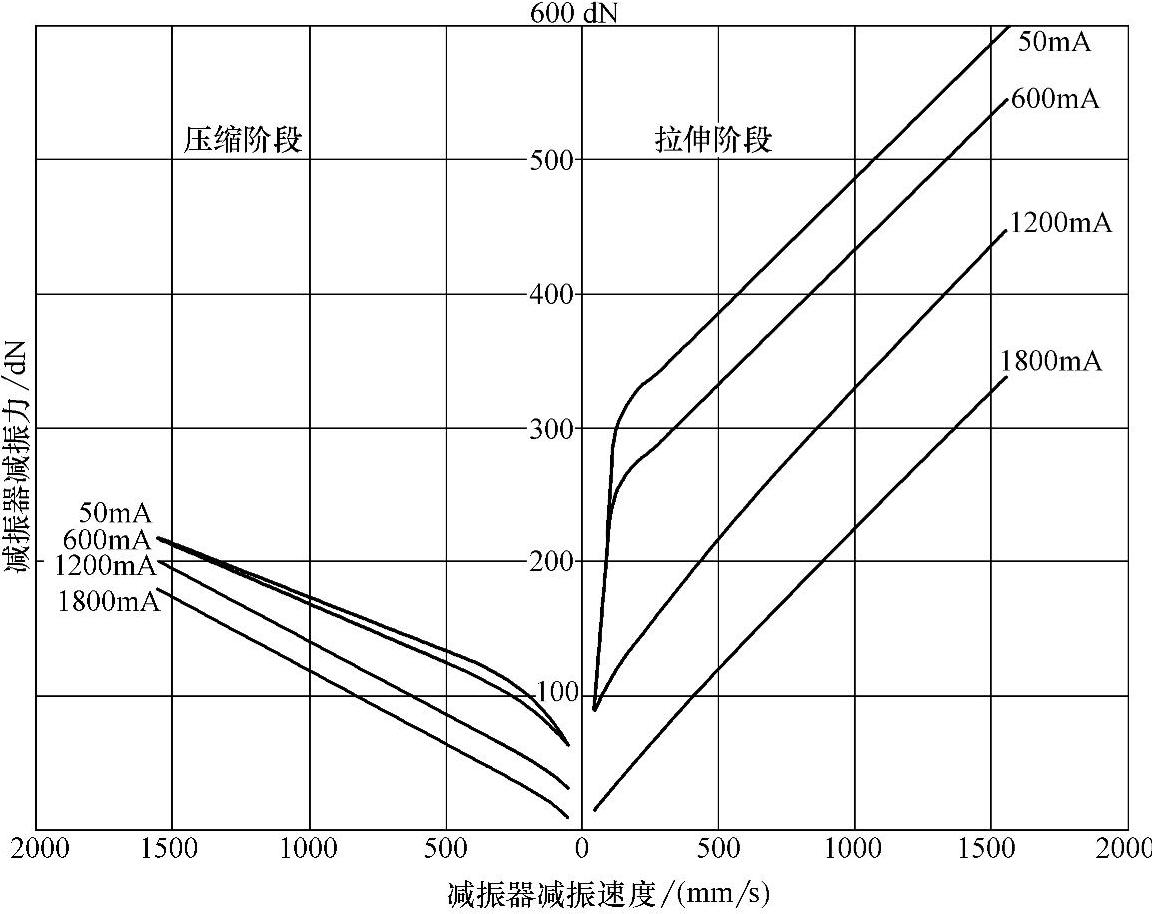
图7-63 前桥减振器减振力的特性曲线控制策略图
下面给出了这个系统的示意图(如图7-64至图7-67所示)着重说明了该系统与车辆上其他系统的关系,以及显示与操作元件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。