



液压式动力转向系统由于工作压力和工作灵敏度较高,外廓尺寸较小,因而获得了广泛的应用。在采用气压制动或空气悬架的大型车辆上,也有采用气压动力转向系统的。但这类动力转向系统的共同缺点是结构复杂、消耗功率大,容易产生泄漏,转向力不易有效控制等。近年来,随着电控技术在汽车上的广泛应用,出现了电动式电子控制助力转向系统,简称电动式EPS或EPAS系统(EPS、EPAS是Electronic Control Power Steering和Electric Power Assist Steering的简称)。
电动式EPS系统是一种直接依靠电动机提供辅助转矩的电动助力式转向系统。该系统仅需要控制电动机电流的方向和幅值,不需要复杂的控制机构。另外,由于利用微机控制,为转向系统提供了较高的自由度,同时还降低了成本和减少了质量。
电动式EPS系统的主要特点如下:
①电动机、减速机、转向柱和转向齿轮箱可以制成一个整体,管道、液压泵等不需要单独占据空间,易于装车。
②基本上只增加电动机和减速机,没有了液压管道等部件,使整个系统趋于小型轻量化。
③液压泵仅在必要时用来使电动机运转,故可以节能。
④因为零件数目少,不需要加油和抽空气,所以在生产线上的装配性好。
因此,从发展的角度看,电动式动力转向系统将成为标准件装备在汽车上。
1.电动式EPS系统的组成与特点
(1)电动式EPS系统的组成 电动式EPS系统是一种直接依靠电动机提供辅助转矩的助力转向系统,其系统框图如图5-36所示。不同类型的EPS系统的基本原理是相同的:转矩传感器与转向轴(小齿轮轴)连接在一起,当转向轴转动时,转矩传感器开始工作,把输入轴和输出轴在扭力杆的作用下产生的相对转动角位移变成电信号传给ECU,ECU根据车速传感器和转矩传感器的信号决定电动机的旋转方向和助力电流的大小,从而完成实时控制助力转向。因此它可以很容易地实现在车速不同时提供电动机不同的助力效果,保证汽车在低速转向时轻便灵活,高速转向时稳定可靠。因此,该系统助力特性的设置具有较高的自由度。
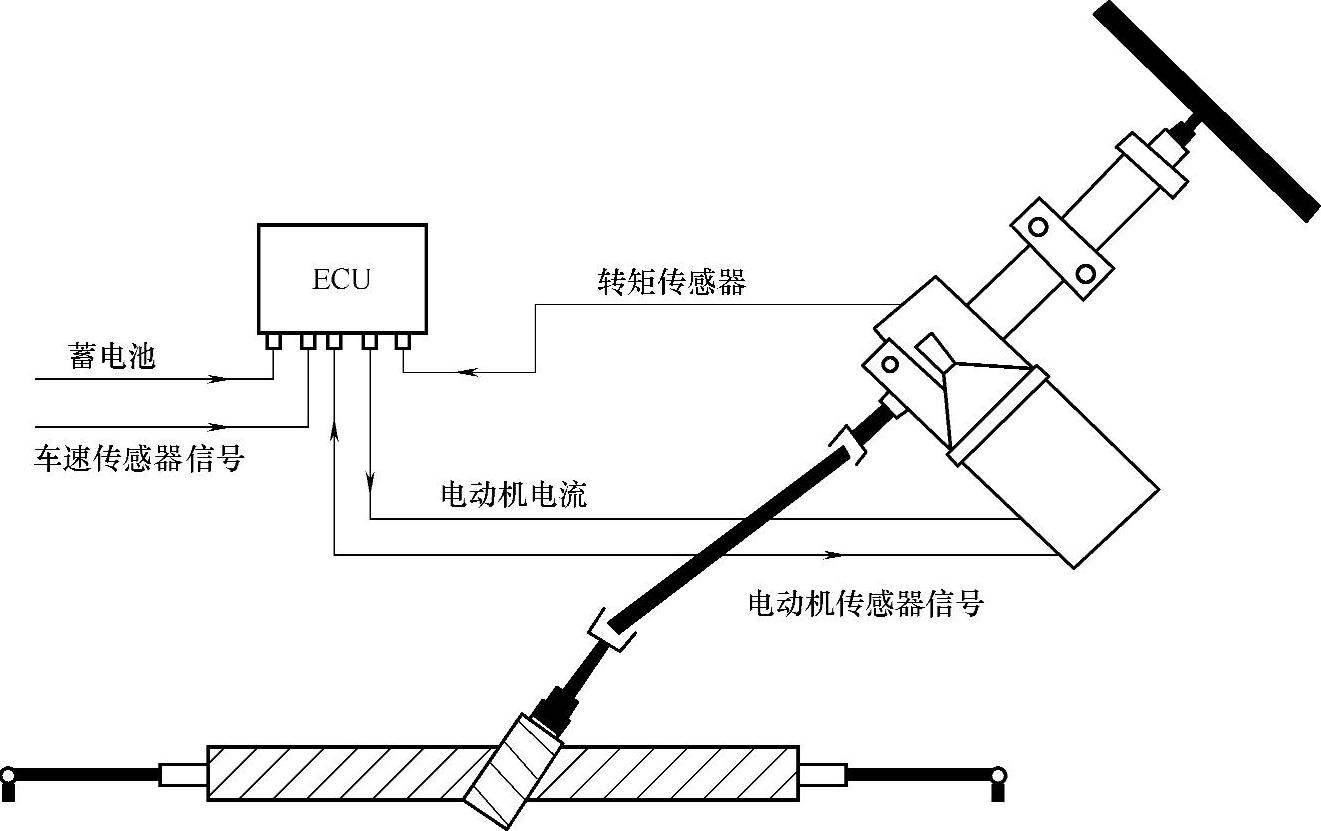
图5-36 电动式EPS系统框图
电动式EPS系统通常由转矩传感器、车速传感器、ECU、电动机和电磁离合器等组成(图5-37),系统各部件在车上的布置如图5-38所示。
(2)电动式EPS系统的工作原理 当操纵转向盘时,装在转向轴上的转矩传感器不断地测出转向轴上的转矩,并由此产生一个电压信号。该信号与车速信号同时输入ECU,ECU根据这些输入信号进行运算处理,确定助力转矩的大小和方向,即选定电动机的电流和转向,调整转向的助力。电动机的转矩由电磁离合器通过减速机构减速增矩后加在汽车的转向机构上,使转向机构得到一个与工况相适应的转向作用力。
(3)电动式EPS系统的分类 根据电动机布置位置的不同,电动式EPS系统可分为转向轴助力式、齿轮助力式和齿条助力式3种。
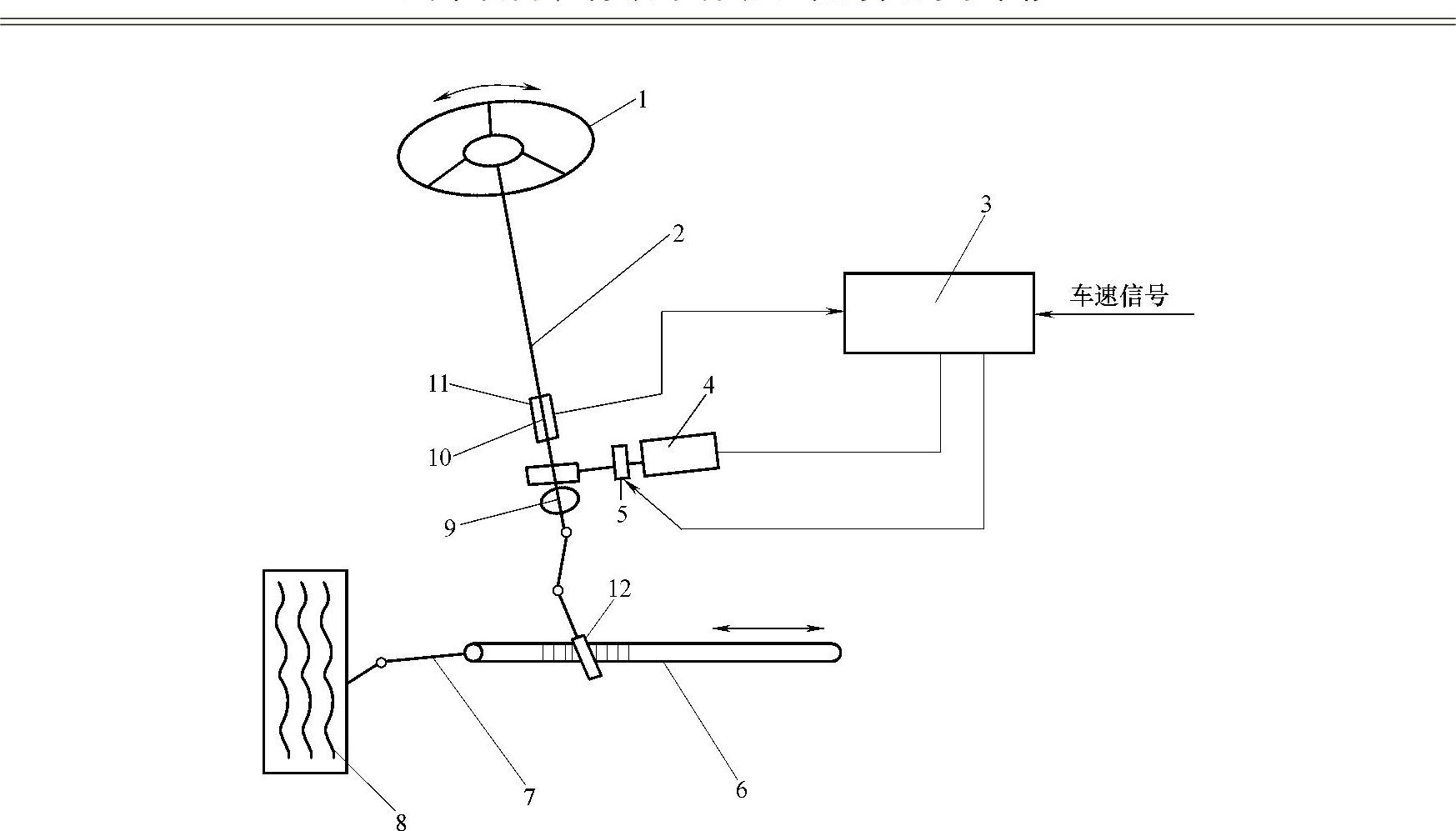
图5-37 电动式EPS系统的组成
1—转向盘 2—输入轴(转向轴) 3—ECU 4—电动机 5—电磁离合器 6—转向齿条 7—转向横拉杆 8—轮胎 9—输出轴 10—扭力杆 11—转矩传感器 12—转向齿轮
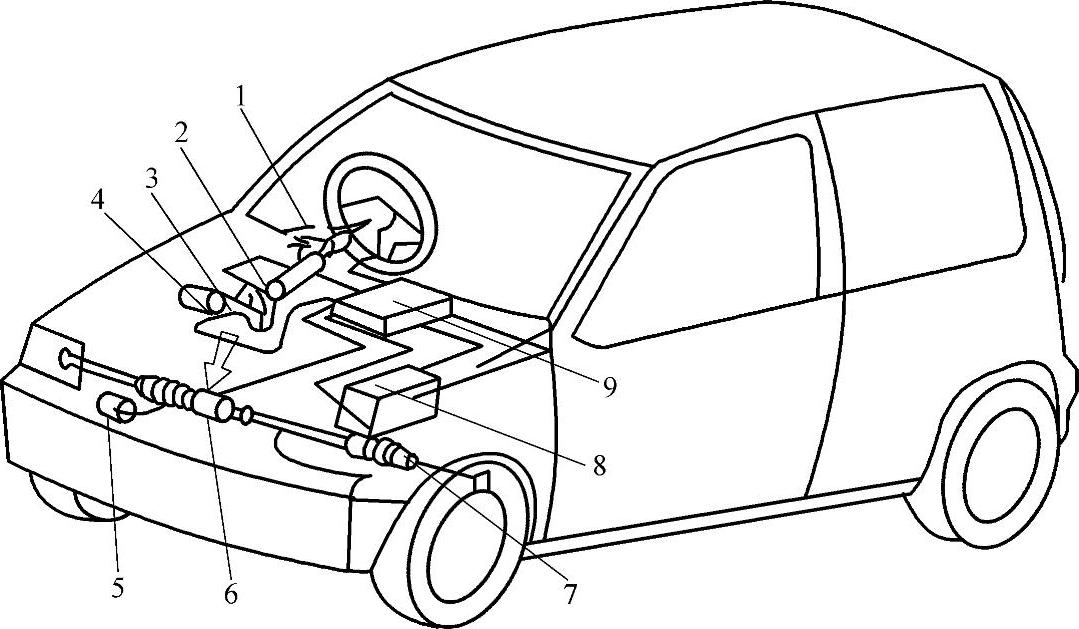
图5-38 系统各部件在车上的布置
1—车速传感器 2—转矩传感器 3—减速机构 4—电动机与离合器 5—发电机 6—转向机构 7—发动机转速传感器 8—蓄电池 9—ECU
1)转向柱助力式转向系统的电动机固定在转向轴一侧,通过减速机构与转向轴相连,直接驱动转向轴助力转向。
2)齿轮助力式转向系统的电动机和减速机构与小齿轮相连,直接驱动齿轮助力转向。
3)齿条助力式转向系统的电动机和减速机构则直接驱动齿条提供助力。
2.电动式EPS系统部件的结构及工作原理
(1)转矩传感器 转矩传感器也称为转向传感器,其作用是通过测定转向盘与转向器之间的相对转矩,作为电动助力的依据之一。
转矩传感器的结构及工作原理如图5-39所示。
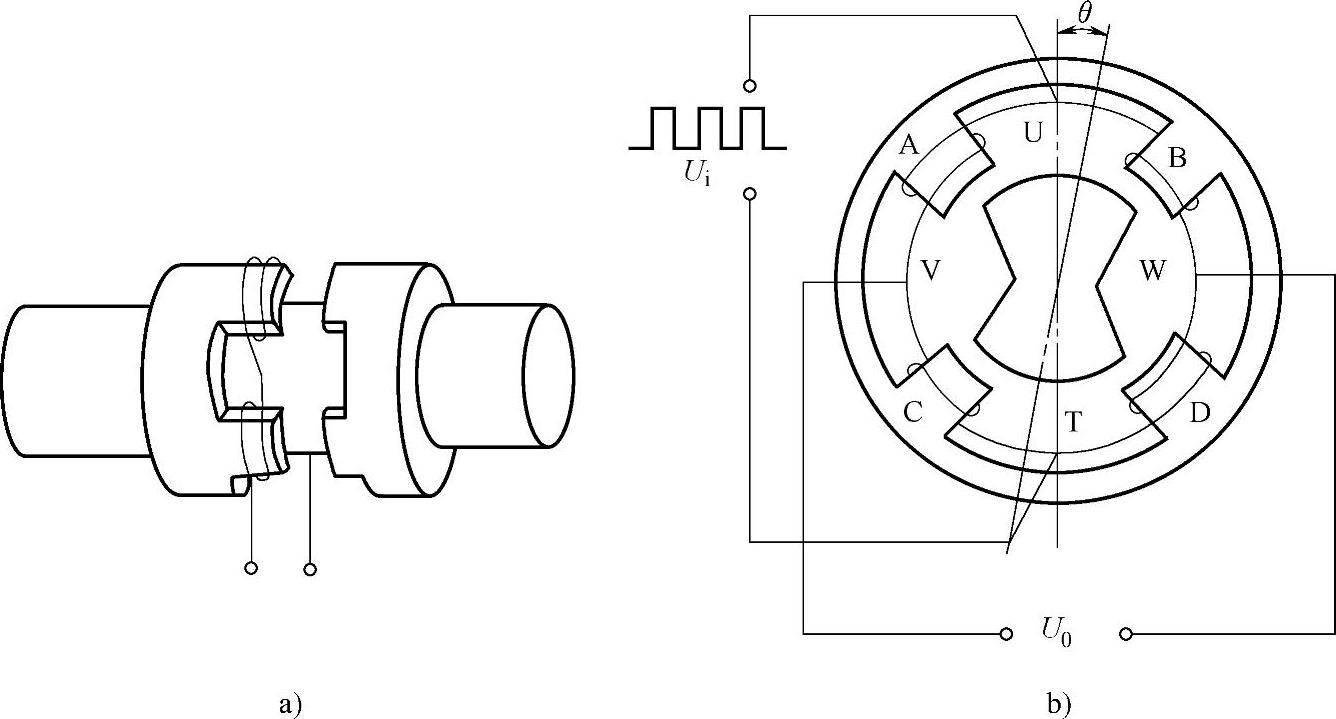
图5-39 转矩传感器的结构及工作原理
a)结构 b)工作原理
用磁性材料制成的定子和转子可以形成闭合的磁路,线圈A、B、C、D分别绕在极靴上,形成一个桥式回路。转向轴扭转变形的扭转角与转矩成正比,所以只要测定轴的扭转角,就可间接地得到转向力的大小。
在线圈的U、T两端施加连续的脉冲电压信号Ui,当转向轴上的转矩为零时,定子与转子的相对转角也为零。这时转子的纵向对称面处于定子AC、BD的对称平面上,每个极靴上的磁通量是相同的。电桥平衡,V、W两端的电位差U0=0V。
如果转向轴上存在转矩时,定子与转子的相对转角不为零,此时转子与定子间产生角位移θ。极靴A、D间的磁阻增加,B、C间的磁阻减小,各个极靴的磁阻产生差别,电桥失去平衡,在V、W两端产生电位差。这个电位差与轴的扭转角θ和输入电压Ui成比例,从而可得到转向轴的转矩。
一种实际应用的转矩传感器如图5-40所示,其工作原理与上述基本相同,优点是便于安装。(https://www.xing528.com)
(2)电动机、电磁离合器与减速机构 电动机、电磁离合器和减速机构组成的整体称为电机组件,其结构如图5-41所示。
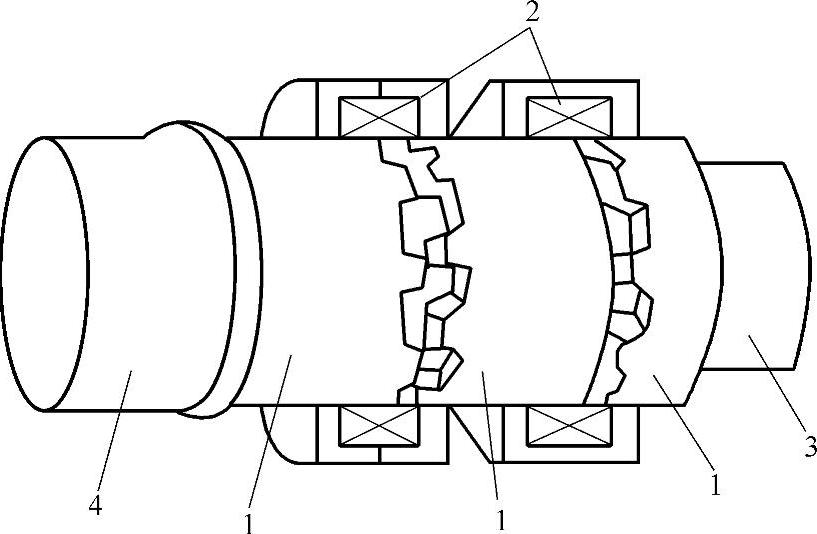
图5-40 实际应用的转矩传感器
1—检测环 2—检测线圈 3—输入轴 4—输出轴
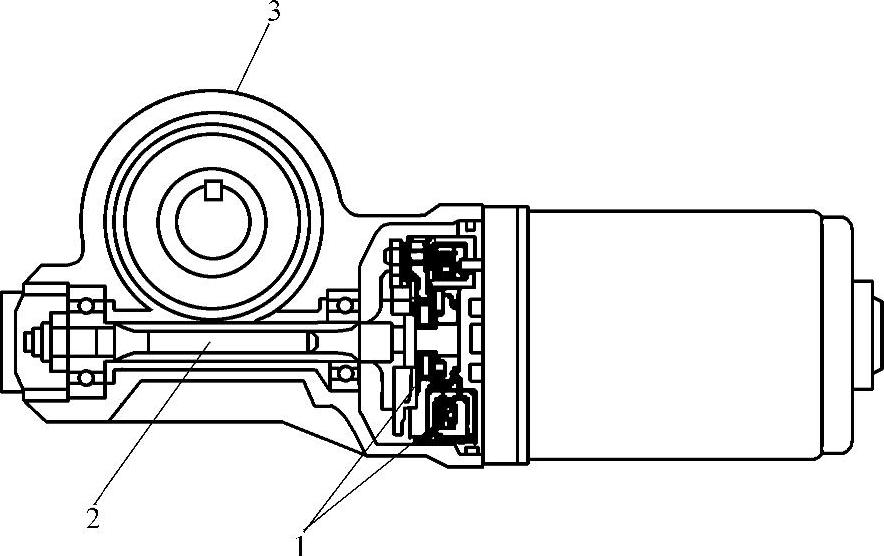
图5-41 电机组件
1—电磁离合器 2—涡轮 3—斜齿轮
1)电动机。转向助力电动机是一般的永磁电动机(工作原理不再叙述),电动机的输出转矩控制是通过控制其输入电流来实现的,而电动机的正转和反转则是由ECU输出的正反转触发脉冲控制的。图5-42所示为一种比较简单实用的电动机正反转控制电路。
a1、a2为触发信号端。从ECU得到的直流信号输入到a1、a2端,用以触发电动机产生正反转。当a1端得到输入信号时,晶体管VT3导通,VT2得到基极电流而导通,电流经VT2的发射极和集电极、电动机、VT3的集电极和发射极搭铁,电动机有正向电流通过而正转。当a2端得到输入信号时,晶体管VT4导通,VT1得到基极电流而导通,电流经过VT1的发射极和集电极、电动机、VT4的集电极和发射极搭铁,电动机有反向电流通过而反转。控制触发信号端的电流大小,就可以控制通过电动机电流的大小。
2)离合器。一般使用干式单片电磁离合器,如图5-43所示。它的工作电压为12V,额定转速时传递的转矩为15N·m,线圈电阻(20℃时)为19.5Ω。
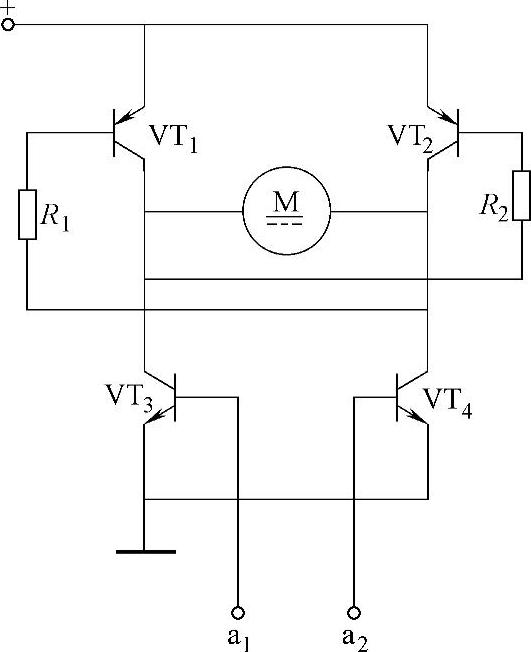
图5-42 电动机正反转控制电路
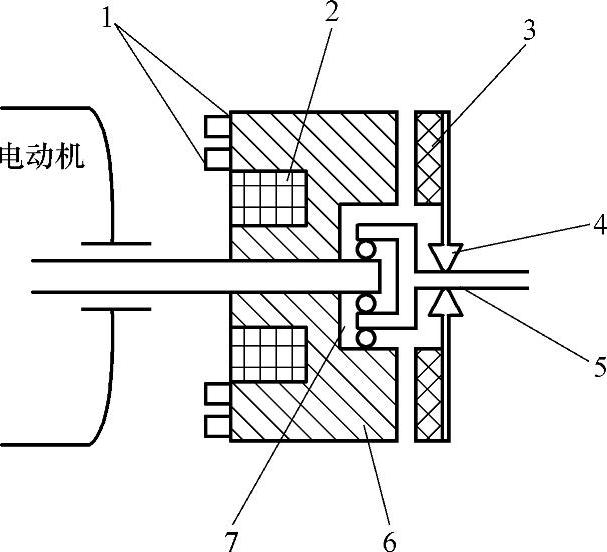
图5-43 电磁离合器的结构
1—集电环 2—线圈 3—压板 4—花键 5—从动轴 6—主动轮 7—滚珠轴承
离合器的工作原理是:当电流通过集电环进入离合器线圈时,主动轮产生电磁吸力,带花键的压板被吸引与主动轮压紧,电动机的动力经过轴、主动轮、压板、花键、从动轴传给执行机构。
由于转向助力的工作范围限定在一速度区域内,所以离合器一般设定一个速度范围,如当车速超过30km/h时,离合器便分离,电动机也停止工作,这时就没有转向助力的作用。当电动机停止工作时,为了不使电动机及离合器的惯性影响转向系统的工作,离合器应及时分离,以切断辅助动力。当系统中电动机等发生故障时,离合器会自动分离,这时可恢复手动控制转向。
3)减速机构。目前使用的减速机构有多种组合方式,一般采用蜗轮蜗杆与转向轴驱动组合式;也有的采用两级行星齿轮与传动齿轮组合式,如图5-44所示,涡轮与固定在转向输出轴上的斜齿轮相啮合,它把电动机的回转运动减速后传递到输出轴上。为了抑制噪声和提高耐久性,减速机构中的齿轮有的采用特殊齿形,有的采用树脂材料制成。
3.控制系统
电动式EPS系统的控制框图如图5-45所示。控制电路的中心是8位的单片微型计算机,内装256字节的RAM,4KB的ROM和8位的A-D转换器。
主转矩传感器和辅助转矩传感器的转矩信号及电动机的信号通过A-D转换器输入到微型计算机中,而车速信号、发动机转速、蓄电池电压和起动机开关的通断状态、交流发电机的L端子电压则通过接口电路输入到微型计算机中。
转矩信号通过A-D转换器输入到计算机后,计算机根据车速范围按照规定的转矩—电动机电流变换值,确定出电动机的电流指令值,输入到D-A转换器转换成模拟信号,之后输入到电流控制电路中去;同时,计算机还输出电动机的旋转方向指示信号,这个信号输入电动机的驱动电路后,便决定了电动机的旋转方向。
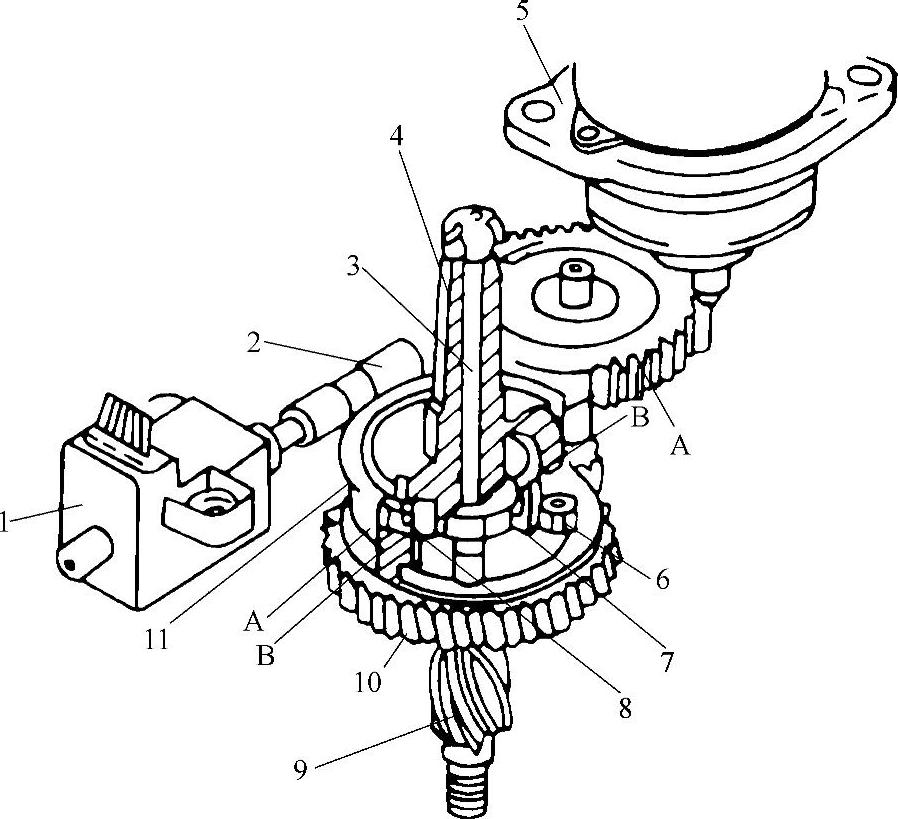
图5-44 双级行星齿轮减速机构
1—转矩传感器 2—转轴 3—扭力杆 4—输入轴 5—电动机与离合器 6—行星小齿轮A 7—太阳轮 8—行星小齿轮B 9—驱动小齿轮 10—内齿圈B 11—内齿圈A
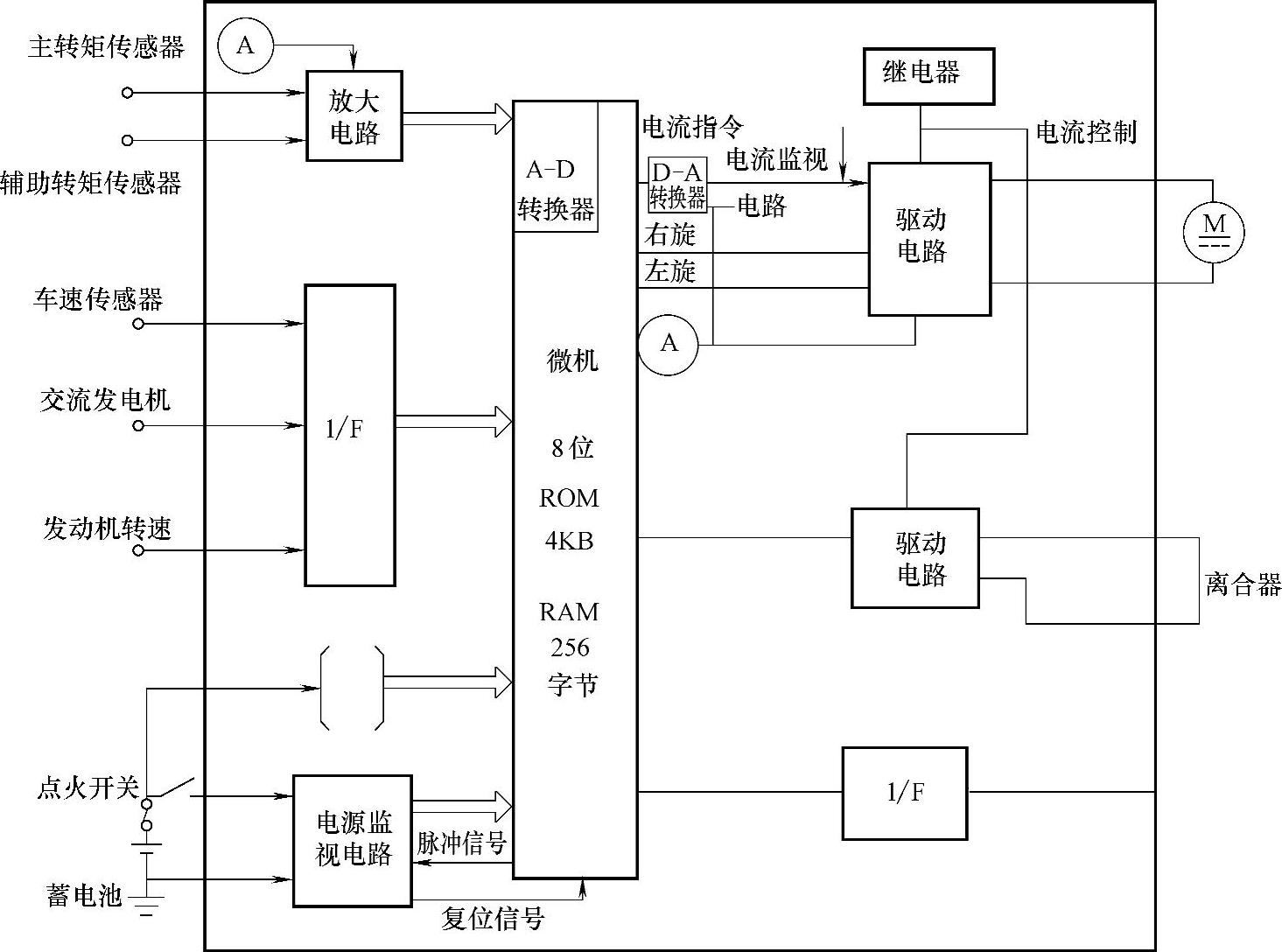
图5-45 电动式EPS系统的控制框图
电流控制电路把上述的已成为模拟信号的电流指令与电动机的实际电流相比较后,产生与二者幅度相同的斩波信号。驱动电路收到斩波信号与旋转方向指令信号之后,则输出指令,驱动功率MOS-FET电路,控制电动机的电流,使其按规定的方向旋转。
当超过规定的车速时,离合器的驱动信号被切断,电动机与减速机构分离,同时电动机也停止工作。
4.故障诊断与安全保护
控制元件具有故障自诊断功能,当电气系统发生故障时,能自动停止助力。同时,计算机可以记忆故障内容,并使故障指示灯点亮。维修时可读取故障码,找出故障原因。
出现电气故障后,控制电路停止向电动机供电,在装有离合器的EPS系统上,离合器脱开,恢复到手动控制转向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。