



为开发合适的辅助系统和设计相应的接口,在开发过程中要及早考虑驾驶人的需要。除辅助的方案试验外,还要进行辅助系统的全面性能和验收试验。这些工作对未来性能更加优良的汽车与驾驶人(用户)的接口特别重要。除了实际的行驶试验外,如前所述,还要进行越来越多的使用试验。除了主观评价这样的模拟系统特征外,还可客观地评价人与这些工程系统的关联。建立在认识科学成果基础上,从驾驶人的学习行为和人—机相互作用行为的人—机工程学,可开发出优化的、透明的操作逻辑和辅助系统特征平台。
在这期间,使用多种行驶模拟器以进行操纵方案和显示方案的模拟试验和评估它们的潜力。其中使用了能实现行驶模拟的固定座椅模拟器和动态模拟器。
使用试验接口的模拟器的主要优点是在不变的或有目的地改变环境条件下可再现结果。在某个辅助系统使用和维修时可靠的再现性根本不需要由有资格的小组作出结论。同样,可以系统试验在实际中确实有危险的极端状态。这样有机会,特别是及早定义辅助系统的可变性,进行接近实际的、与人相关的辅助系统临界变量(参数)的试验。
试验方案的性能可由多个步骤得到。首先用试验车在实际的行驶环境中进行试验。行驶试验只提供有关驾驶人负荷、肌肉张力状况的、可重复的、只有有限细节的行驶记录和辅助试验潜力的结果。再现前面的结果可以在模拟环境中,用简单的系统(如固定座椅模拟器)或想象真实的(虚拟的)实验室中进行可再现性试验。使用动态行驶模拟器可得到明显简化的结果(图8.6-5)。它与实际环境下的偏差可通过相应的运动或加速度修正。多种结果非常接近真正的结果,但它们是在放宽可再现的前提下。建立在这些结果上的“真正”的结果又用于实际的行驶试验中,特别是带柔性试验支架[如驾驶人辅助系统汽车(FASCar)]进行实际的行驶试验。这样可以在实际的交通中适度限制力和时间,或在试验地区不限制力和时间进行相应的辅助干预。
图8.6-6是辅助系统的各种试验方法。

图8.6-5 行驶模拟器
通常,减轻人(驾驶人)的负荷常关注身体的负荷,但也要优化人(驾驶人)的精神(心灵)负荷。在与自动化的一些系统共同作用时要考察人—机相互作用的各个方面:
自动化对人的最先反应是从肌肉的放松到包括精神在内的完全放松。在这里,确定人在自动化的人—机相互作用中的任务十分重要。从减少注意力考虑,在工程系统发生故障时,人要作出相应的反应在某些情况下是不可能的,或至少是很困难的。(https://www.xing528.com)
另一方面,对人(驾驶人)来说也要提高肌肉张力。监控系统的信息也是对人的特别要求,或许也是加深对自动化的人—机相互作用的认识要求。特别是只通过通道(如只是目视化)传递信息更是一个特别的挑战。
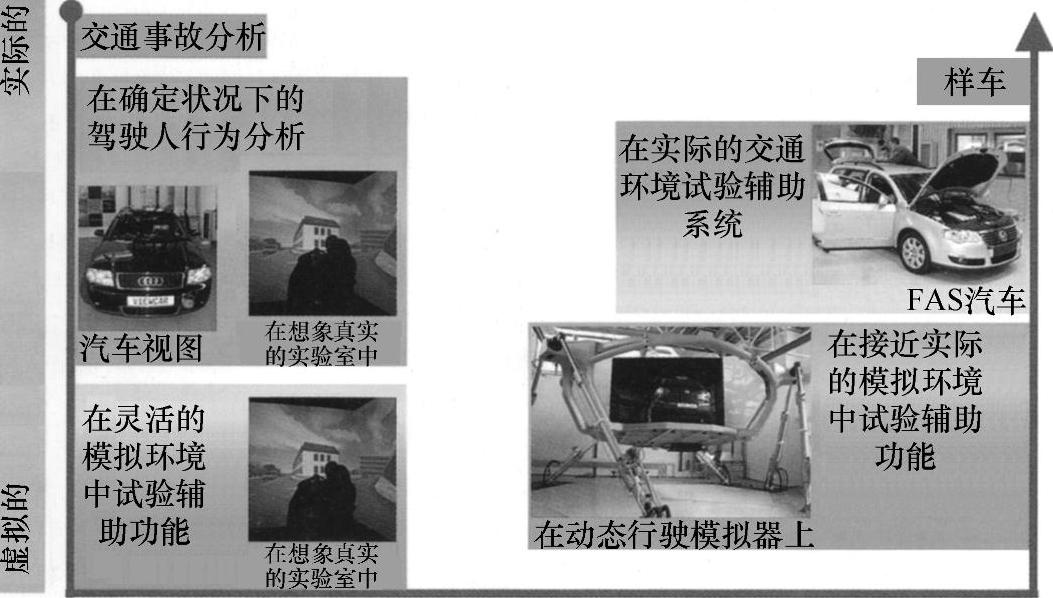
图8.6-6 辅助系统的各种试验方法
有时非常短的、由任务引起的人的行为层面之间或能力层面之间的变化,对人(驾驶人)提出苛刻要求。人的肌肉张力大小反映人(驾驶人)的主观感触(感受)。通过生理学的测量法、主观评价和询问法可得到人的肌肉张力,也可在上面所说的试验用车(ViewCar)上进行试验得到。
参考文献
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。