



目前唯一使用电线连接的数据总线将车内各系统连接起来。它传输所有来自“控制”方面(从外部温度传感器到车轮转速传感器)和“指挥”方面(从控制风窗玻璃升降机构到驾驶人辅助系统)的信息与命令。还有传输娱乐、多媒体、视频等基本信息。此外,在“线控”概念下电线连接的数据总线不断替代机械连接,如“电子加速踏板”或在大量的样车或试验车上已实现电子转向。
除数据容量和按网络拓扑结构(即按连接结构的传输技术)外,可将网络分类[1]。网络有三种基本型式:
1)点对点连接:只有两个参与者的网络(下面不再关注它)。
2)环形网络:所有的部件连成一个环(图8.3-2)。这种结构的最大优点是导线消耗少、连接快。如果在环的某处中断,则所有部件间的数据传输中断,为此必须开发较贵的控制系统和“旁通”方案。
3)星形连接:星形连接是所有部件通过安装在星中心的“壁垒(Hub)”(也称总线“守护者”)连接起来。它可保证顺利通信(图8.3-3)。这种连接不需要其他的控制系统,因而比环形连接成本低。另外,在一个线路中断时可以与其他线路联系。当然星形连接线路要贵,汽车重量也增加。在“壁垒”或“守护者”失效时导致整个网络失效。
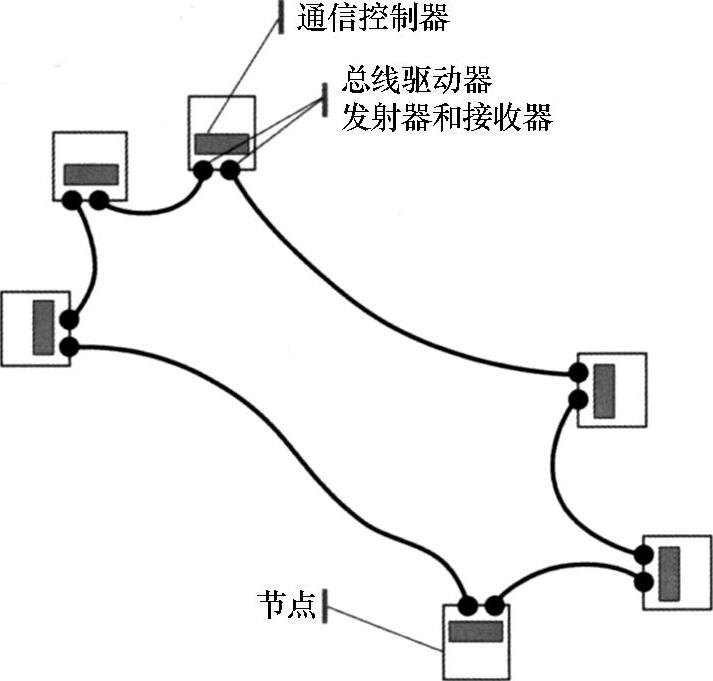
图8.3-2 光通信系统的环形连接(环形网络)
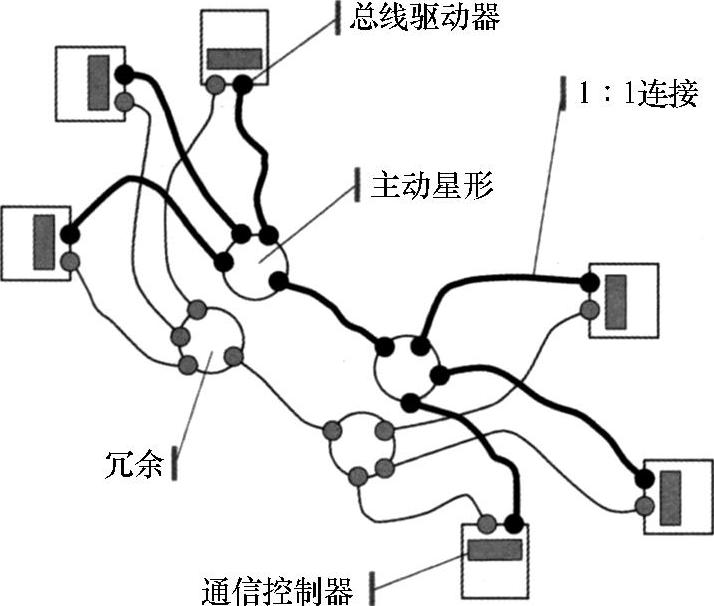
图8.3-3 主动的星形结构
独立的拓扑结构总线系统比各个部件间单独的信号线有不少优点:
1)每个汽车部件只与总线连接一次。敷设线路简单、所需结构空间小、重量轻、成本低。在配置最多的梅赛德斯S级(W220)轿车上使用总线系统约可节省17kg线束重量(从56kg减至39kg)。
2)在总线上的所有仪器(装置、设备)可相互通信和相互反应。如在接入风窗玻璃刮水器时利用设置反向行程可自动起动后风窗玻璃刮水器。这种连接称为多功能连接。
3)利用冗余导线可更好防止故障。
4)因为总线、总线接口和通信协议是标准的,可提高部件模块化。在不同汽车上使用很多不同配置的电控单元时只要将一些附加功能的模块组合起来,或从中取出一些模块。
原则上,在电线连接的通信系统中必须区别两种数据传输技术:电的数据总线和光的数据总线(图8.3-4)。这些系统将在下面介绍。
1.电的通信系统
在网络中的电通信系统,作为电脉冲的数据通过常规的铜线发送。这种传输方式相当便宜,能承受较大的机械载荷。当然,导线连接的网络容易受到电磁干扰,需仔细屏蔽和隔离(见8.4节),这样成本就增加。此外,线束较重。线束还是占汽车网络的大部分。(https://www.xing528.com)
现将最重要的总线系统分述如下[2,5]:
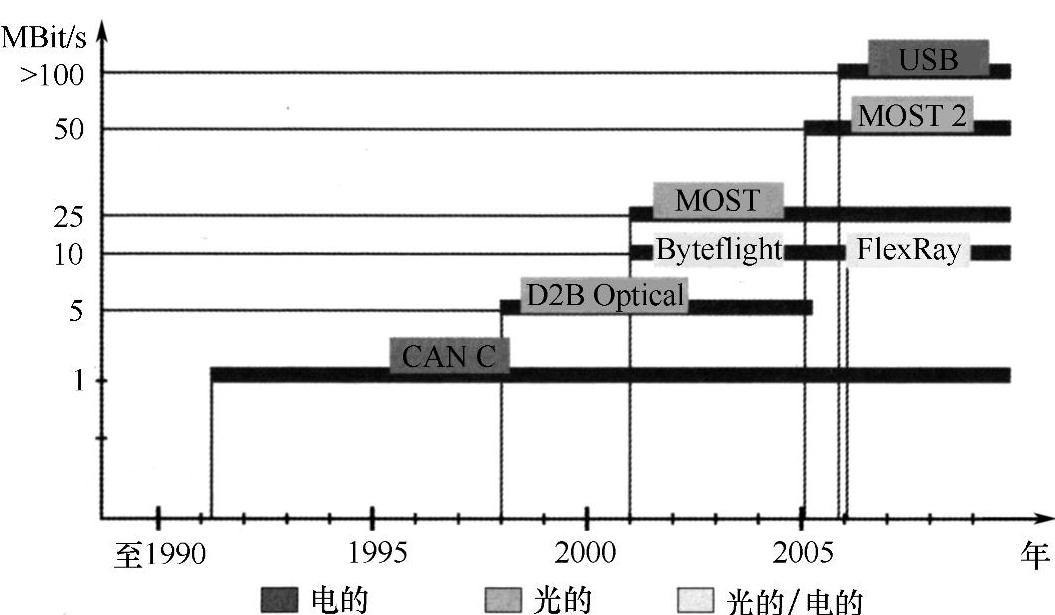
图8.3-4 总线系统选择的连接导线比较
1)LIN总线:本地互联的局域网络(LIN—Local Interconnect Network),是汽车上最简单、最便宜的总线。它只有唯一的12V导线,以此保证有串行数据格式的廉价的传感器及执行器的通信。传输速率为19.6kBit/s的窄带宽。LIN总线只有一个主机(发射机)和多达16个从机(接收机),主要与温度传感器、湿度传感器、执行器和照明器件联网。为节省能量,LIN网络也按“睡眠”模式或“等待”模式工作,直至“唤醒”信息激活从机。
2)CAN总线:控制器区域网络(CAN—Controller Area Network)自20世纪90年代初以来,不断用在汽车上,采用双芯线束交联,如ABS系统或发动机控制。在总线长度到1000m时串联的CAN总线可用的数据传输速率从10kBit/s到1MBit/s。在总线上的最多的参与者(节点)数为32。因为网络是内部分配,所以总的参与者明显增加。在CAN总线上的所有参与者都可以是“主”或“从”,不仅可接收信息,还可发送信息。这种设计称为“多主总线(Multi-Master-Bus)”。通信由事件控制:当电控单元(ECU)发送信息时,只要通道是空着的,相应的CAN控制器受委托,并将信息发送到线路上。如果必须同时发送多个信息,则设定的发送优先清单就控制先后排列顺序。在CAN总线上没有接收地址,当时的信息总时到达所有的参与者(用户)。为保护CAN总线免受强电磁场影响,CAN总线系统设定一个机制,它可识别错误的信息传输并重复传输。另外,还可把故障局部化和,并与相应的控制器和网络分开。
3)TTCAN总线:在重要的安全性系统中使用进一步发展的CAN总线,即时间触发的CAN总线(TTCAN—Time Triggered CAN Bus)。这时通信不是由事件触发的,而是由时间触发的。利用参考的信息在共同的时间校准所有节点,之后在规定的时间窗口通信。当在正常的CAN总线上信息的执行和发送时间可能不精确时就要保证按准确的时间计划传输信息。
4)DC-BUS:当在前面所说的总线系统中要求加一些线束时,则可利用汽车上现有的直流电导线以交换数据。但这种“输电线通信(Power Line Communication)”会受到很多干扰而至今没有在批量生产的汽车上使用。
5)USB/Firewire(火线):考虑到数据传输容量不断地增长,正在讨论从计算机世界借用来的总线USB、Firewire和以太网,用以遥控系统和驾驶人辅助系统。它们的数据传输速率可达200~400MBit/s,并可用光导线实现。当然,它们具有同步数据传输的通信协议在每个节点上需要高速中间存储器。
2.光通信系统
除了电信息传输外,在汽车上还建立了光通信系统,以实现快速和大容量的数据连接。这时,电信息转换为光脉冲,再通过塑料或玻璃纤维的光导线传输。光导线传输速率高、重量轻,没有电磁干扰。但目前的网络制造成本高,对产品质量敏感,不能承受大的机械应力。在装配时弯曲半径不小于几厘米,不允许堆叠。维护和保养要在专门的工厂使用专门工具进行。
最重要的光总线系统细述如下[2]:
1)D2B光总线:内部数据总线(D2B—Domestic Data Bus)首先成批地用于光纤网络上。数据传输速率为5.6MBit/s的光通信系统通过0.98mm厚的有机玻璃(聚甲基丙烯酸甲酯PMM)导线的环状结构与多达5个参与者同步联网。它只用于多媒体部件上。
2)MOST总线:1998年为汽车上多媒体环境使用的定向媒体系统传输(MOST—Media Oriented Systems Transport)总线(MOST-BUS)诞生。MOST网络大多为环状,在重要的安全性系统上应用时采用双环结构。在双环上可连接多达64个MOST仪器(装置、设备)。因为MOST总线系统按简单操作设计(即插即放Plug-and-Play),所以可容易地将各个仪器(装置、设备)分开或添加。在MOST网络中,MOST仪器(装置、设备)充当定时主机(Timing-Mas-ters)角色,它将连续的帧输入到MOST环上。要传输的MOST帧开头发送的序言是为与定时从机(Timing Slaves)同步的。
通过以双相编码(Biphasen-Codierung)为基础的同步传输,可将定时从机不断地再同步。可供传输的数据流(同步数据传输)和数据包(非同步数据传输)的速率约为23MBit/s的带宽。它们分为60个物理通道,这些通道可由用户选择和配置。MOST总线支持多达15个非压缩的、CD品质的立体声音频通道或多达15个MPEG1通道(活动图像压缩标准1通道)的音频—视频传输[3]。仅用MOST总线还不能传输高分辨率、非压缩的视频数据流。MOST总线同时提供一个通道,以传输控制信息,为此提供768KB的带宽。这样每秒几乎可传输3000个控制信息。利用控制信息可以配置MOST仪器(装置、设备)以及同步、非同步数据传输。
在未来,利用新的光导线可在MOST—BUS上进一步提高数据传输速率。从2008年起,可期盼MOSTⅡ的传输速率为50MBit/s;在2010年后,MOSTⅢ的传输速率可达150MBit/s。
3)Byteflight/FlexRay总线:几年来使用了主要为“线控(x-by-wire)”系统和重大安全性系统传输更大的数据量的Byteflight-Bus和进一步开发的FlexRay-Bus。它们可以自由配置同步和非同步数据传输,最大速率为10MBit/s的带宽。这种灵活的、扩展的网络最多有64个节点,它们可以是点对点连接或利用经典的总线结构相互连接。传输的物理介质为铜线或大部分是光导线。FlexRay-Bus基本方案与时间控制的CAN-Bus相当。当人们重视TTCAN总线的误差和安全性时,FlexRay总线的重点是通信的灵活性。1999年宝马公司和戴姆勒克莱斯勒创造性地开发了FlexRay总线。但这期间,其他一些汽车生产厂家和所有有名的供货商参与了相应的联合开发组织。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。