



尽管汽车驾驶人总是在总体上主观评价行驶性能,但客观评价越来越重要。在汽车系统开发以及在不同汽车行驶性能的相互比较中,离不开客观的特征参数。这些特征参数或特征函数来自对真实汽车在行驶时的测量,或较经常地来自在计算机上对汽车模型的仿真结果。计算仿真时需要定义和统一相应的边界条件,即行驶技巧或行驶方式,其中很大部分在ISO/DIN标准中作了规定。最重要的是横向动力学的“开环”试验方法。垂直动力学试验方法至今还远没有达到普及或统一的程度。为此,下面的叙述只涉及汽车横向动力学性能。
这样选择“开环”试验方法,为使测量结果尽可能不受驾驶人影响,即在行驶技巧方面,应限制驾驶人动作的变化,如测量时尽可能保持操纵元件,如转向盘或加速踏板位置不变或松开。有关横向动力学试验方法的不少规范见参考文献[2,18]。
评价的基础是汽车在按图7.5-1的坐标系中的运动。主要要测量和评价:
1)纵向和横向速度 ,并确定航向角
,并确定航向角
2)纵向和横向加速度 。
。
3)横摆角和横摆速度 。
。
4)侧倾角和纵倾角φ、θ。
以及驾驶人操纵参数:
1)转向盘角度和转向力矩δH、MH。
2)加速踏板和制动踏板行程以及相应的力。
3)制动压力。
测量汽车运动参数的传感器(加速度传感器和角度传感器)和测量速度的传感器是稳定汽车的陀螺平台(或类似的其他测量方法)。稳定汽车的陀螺是必需的,以保持地球坐标系的原始平面,并可测量与汽车纵倾角和侧倾角无关的汽车平移加速度。新颖的测量装置(如VBoxen)利用卫星定位(GPS),并由此算出汽车行驶速度和加速度。转向盘转角和转向力矩测量大多使用专门的转向测量盘,它替代原来的转向盘。测量数据通过汽车上的测量设备在线处理。转向角的精确输入对新的测量方法提出高要求,目前与汽车反应有关,如在“鱼钩(Fishhook)”试验时(见4),反向转向与侧倾角或侧倾角速度有关。鱼钩试验只能用转向机进行。转向机在汽车上的布置见图7.5-2。转向盘被带电动机和反作用力矩支架组成的转向测量盘替代。
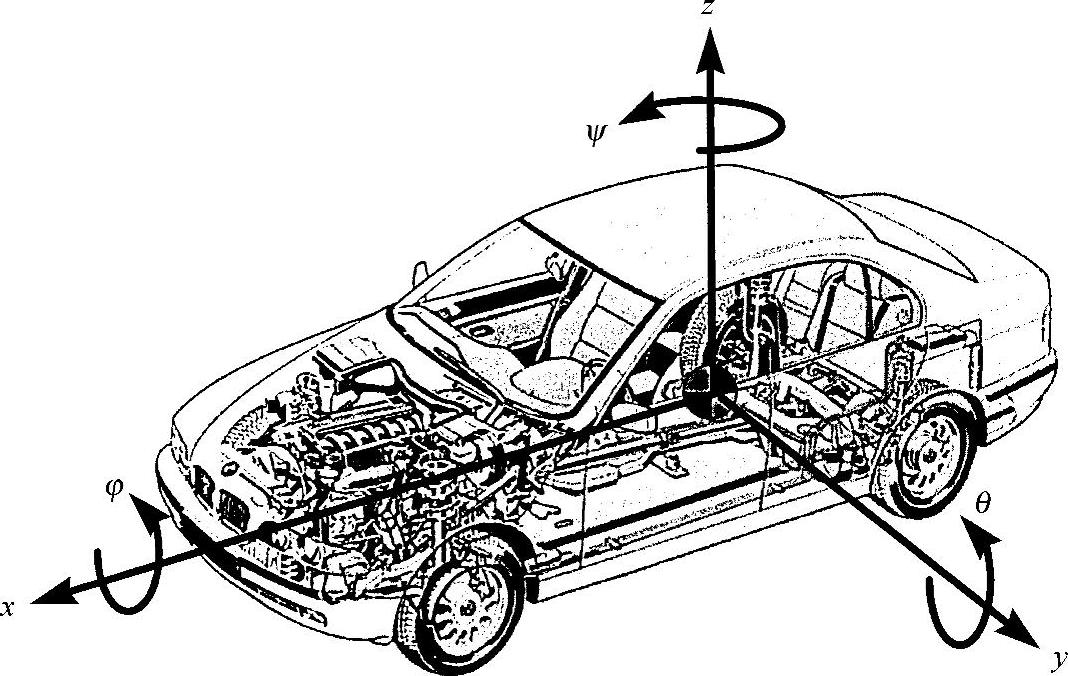
图7.5-1 在直角坐标系中的汽车
还有一些其他测量装置。它们用于汽车开发中评价和优化汽车的各种性能,也可评价和优化部件、组件。如为评价汽车行驶动力学,需要知道汽车上各个车轮在不同行驶技巧或不同行驶方式(如弯道制动)时车轮的前束、外倾位置处于什么状态。在行驶时测量车轮前束、外倾参数的测量装置见图7.5-3。光源固定在车轮侧的激光束照射到固定在车身上的接收机上。接收机记录车轮角度的变化。利用等时间显示的汽车行驶过程可以分析重要的轴载变化和运动学变化,以进行评价。

图7.5-2 汽车上精确设定转向角函数的转向机

图7.5-3 在汽车行驶时测量前束和外倾的测量装置
1.直线行驶性能
在评价直线行驶性能时要区分两种不同的边界条件:
1)不受干扰的等速直线行驶。这时只有(被误认为平面)路面的干扰进入汽车。
2)受干扰的直线行驶。这时侧向风力、制动力、驱动力或一起行驶的挂车作用在汽车上的力。
对1)只有很少的常用的测量方法。其一是汽车运动参数很少,难于表示出来;其二是在较长时间的直线行驶时总是有驾驶人的影响,所以确切地评价汽车直线行驶性能不是容易的事。可考虑的评价方法是在观察时间内,在规定的行驶道路得到转向盘角度变化的频谱,直至在转向盘位置保持不变时离开车道,或确定“横摆速度误差”。按参考文献[3]可以将直线行驶时测量的横摆速度分成两部分。第一部分来自转向盘转角(由单车道模型得到),余下的为第二部分,这部分称为“横摆速度误差”,它是直线行驶偏差的一个尺度。在参考文献[4]中描述了从转向输入到出现汽车横向加速度的相位延迟与直线行驶品质之间的紧密关联性。转向相位延迟小的汽车,即对转向响应快的汽车的特征在于好的闭环控制性能,并评价为汽车的直线行驶性能“好”。ISO 13674第一部分“摇晃试验(Weave Test)”用于评价汽车直线行驶时的“转向感觉”。按该规定,汽车以0.2Hz转向频率正弦曲线行驶,并从转向盘力矩随转向盘转向角(在中间位置范围)的变化到车道校正时自转向性能结束。ISO13674第二部分规定“瞬态试验”。按该规定,在转向角缓慢增加时记录汽车离开直线行驶的反应,即记录横摆速度、横向加速度随转向盘转角和转向力矩的变化。
对2)有不少的试验方法,如在产生侧向风的试验设备上评价汽车对侧向风的灵敏度。风扇产生约为60~80km/h、大多与汽车行驶方向垂直的人造侧向风。所有的风扇总长大多为15~40m。作为评价参数,在超车行驶时测量横摆角、横摆速度和横向偏差。与自然风相比,人造侧向风还有不少缺点(气流攻角、阵风),这些缺点促使开发在自然条件下的测量方法。在参考文献[5]中,利用安装在车顶的“风向标”测定风干扰强度和方向以及汽车对风干扰的反应(横摆速度)。按参考文献[13],在自然风条件下,作为驾驶人/汽车整个系统的试验可得到这样的结果:驾驶人能很好控制频率在0.5Hz以下的风干扰,这时汽车对侧向风的反应很小(图7.5-4)。风干扰频率在(0.5~2.0)Hz时驾驶人较早地增强横摆反应。风干扰频率超过2.0Hz,汽车不再受驾驶人影响,即为评价侧向风对汽车的影响,汽车的转向性能也有很大的作用。

图7.5-4 在侧向风时受驾驶人影响和不受驾驶人影响的汽车横摆反应(与风干扰有关)
在直线行驶时,评价制动性能的试验首先涉及在各种路面和不同附着系数的制动距离和保持行驶方向(出现横摆速度)的状态。在制动性能试验和加速性能试验时还要测量由此引起的纵倾角,它是底盘“点关(Anti-Dive)”性能的尺度。在正常情况,好的底盘纵倾角反应应不超过1°。
在乘用车与挂车组合时,会造成行驶稳定性的很大损失。利用转向角脉冲试验可得到行驶稳定性边界。用短时间转向脉冲激励汽车,使汽车不受干扰地直线行驶到横摆摆动。从乘用车与挂车之间的横摆运动变化过程的差别(即所谓弯曲角)可以确定阻尼大小。根据不同行驶速度时的阻尼值,通过内插法和外推法可得到汽车稳定行驶边界的行驶速度,即阻尼为0。乘用车与同等重量挂车的稳定行驶边界的行驶速度按挂车结构型式一般为80~140km/h。
2.弯道行驶性能
为评价弯道行驶性能,首先要规定行驶方式:(https://www.xing528.com)
1)稳态圆圈行驶。
2)稳态圆圈行驶时载荷交变。
3)在弯道制动和加速。
4)滑水。
在稳态圆圈行驶时,汽车以不同的速度在等半径的圆形轨道上行驶。测量结果填在以横向加速度为横坐标、以转向角为纵坐标的图上,见图7.5-5。转向角度变化是自转向性能的尺度。不足转向汽车的特点是转向角随横向加速度增加,转向角的急剧增加(大多也是转向力矩下降,图中未表示)提醒驾驶人汽车已在边界范围(通常横向加速度>7m/s2)。

图7.5-5 在半径为105m的稳态圆圈行驶时转向角、航向角和侧倾角随横向加速度的变化
航向角和侧倾角变化是舒适性和安全性的尺度。在这个实例中,它符合对现代乘用车的要求。在弯道行驶时要测量汽车在稳态圆圈行驶时对载荷交变的反应。如果在规定的圆半径圆圈行驶,突然松开加速踏板,就会产生载荷交变。由于发动机制动力矩,汽车减速行驶。汽车减速度引起轴载偏移和车桥运动学变化,使汽车偏离车道。根据测定的横摆速度和横向加速度可以评价汽车偏离车道的程度。为紧凑表示和考虑人的反应时间,这里采用1s的值,即在激励开始后(这里是松开加速踏板)1s,观察汽车运动参数(横摆速度)。试验结果的实例见图7.5-6。图中可见在激励1s后横摆速度随原始横向加速度的变化。在小的原始横向加速度时汽车几乎没有偏离车道;横向速度由于汽车速度很慢而变化甚微。直到较大的横向加速度时,横向速度增加,汽车向弯道内转动。在弯道行驶制动和加速时可以用类似的行驶技巧或行驶方式评价。在松开加速踏板后还要附加操纵不同制动压力的制动器,或继续操纵加速踏板,以达到不同制动和加速。1s后观察汽车运动参数的1s值与在载荷交变试验相似,纵向减速度作为附加变量出现。
滑水性能试验是非常专门的行驶技巧,它需要一段圆圈试验路段。可给该扇形区路段灌水。汽车在转向盘位置保持不变、节气门位置不变时以不同的速度(即不同的横向加速度)通过扇形区行驶。横向速度和横向加速度变化仍然是汽车偏离车道的尺度。

图7.5-6 在半径为40m稳态圆圈行驶载荷交变时横摆速度变化的1s值
3.过渡性能
过渡性能描述汽车从直线行驶进入弯道或突然变换车道时的行驶性能。典型的评价方法是转向角阶跃。转向盘从直线行驶位置快速转动一定的角度,接着保持不动。汽车的响应,(主要反映在横摆速度、横向加速度和航向角)是响应的快速性、在这种情况下行驶稳定性与转向直接性的尺度。转向输入和横摆速度增加之间的大的时间延迟表明汽车的惰性和勉强转弯的情况。如果在稳态横摆速度值和横向加速度值变化的过渡状态观察到大的幅值和长的过渡时间,则将损害汽车的稳定性。汽车的“增强因子”是横摆速度与转向盘角度之比,并表明为达到规定的汽车横摆反应,驾驶人必须转动多大的转向盘转角。直接转向的特征就是大的“增强因子”。
其他的“开环”试验方法的特征是采用另一些转向角输入形式。可分为:单个正弦脉冲、连续正弦脉冲、三角脉冲和随机的转向角输入(参见ISO 7401)。在单个正弦脉冲输入时,与在转向角阶跃相似,可以用转向角输入和汽车反应(横摆速度和横向加速度)之间的延迟时间评价。在其他的转向角输入方法时采用在频率范围内的汽车运动参数评价。频率范围通常到4Hz。横摆速度、横向加速度的增强功能以及相应的相位变化可以反映汽车的横向动力学性能。在过渡行驶状态范围频率到2Hz的增强功能尽可能不变和相位延迟很小,是平衡行驶性能的准则。在按Weir DiMaro(威尔迪马可)[14]图中醒目地表示的试验结果可了解横摆增强与时间延迟之间和汽车转向输入与汽车反应之间的关联。横摆增强是在稳定行驶时横摆速度和转向角之比。延迟时间是频率的倒数,在该频率时相位正好滞后45°。
也用“闭环试验”法。驾驶人的任务是在规定的路线尽可能快速行驶。按ISO 3888(在车道上只是按标准的踩加速踏板方式,使用随驾驶人而不同的踩加速踏板方式不适合作为标准)的双车道变换是最熟悉的。熟练的驾驶人使用现代乘用车,按ISO标准的踩加速方式以约110~125km/h(或更高)速度行驶。此外,还有不少障碍试验。蛇形距离大多为18m、30m、36m。测定的行驶时间和在行驶时采集的汽车运动参数作为客观评价参数。在观察障碍试验时需要注意,试验结果与蛇形距离和轴距的相互作用、汽车长度以及汽车横摆谐振频率有很大关系。
在1997年,作为倾斜稳定性的“躲避试验(Elchtest)”非常流行。由于不少的踩加速踏板加油方式,需要确定驾驶人在躲避试验中的重要影响,所以还没有找到公认的、客观的和可再现的评价方法。隶属于德国汽车工业联合会的专家委员会已制订了躲避试验规程和限制各种踩加速踏板方式(与各种汽车有关),使驾驶人在试验中的影响尽可能小[6]。此外,还有对加速踏板操纵的明显定义。德国汽车工业联合会(VDA)试验规定,在结束第一次踩加速踏板前10m开始汽车处于滑行状态行驶。这时的汽车行驶状态应该接近真实的行驶状态。这时驾驶人在紧急行驶状态会松开加速踏板。
4.其他的试验方法
为制订主动安全性的评价方法,在行政机关和用户保护组织的工作框架内形成了或正在讨论的一些很专门的试验方法。由于精确描述了边界条件,制订了尽可能再现和可靠修正的试验方法。如由(美)国家公路交通安全局(NHTSA)采用的“鱼钩(Fish-hook)试验,以评定汽车倾斜安全性[11]。通过转向机可以按图7.5-7设定转向角输入。如果倾斜角达到最大值,反向转向可以在精确的时间点。这样可以试验“最坏的情况”。同侧两个车轮至少从路面同时升高50mm就可作为倾斜的评价准则。行驶速度从约50km/h步进式地增加到80km/h,这时倾斜试验结束。与临界倾斜试验相似的试验和其他的相关试验见参考文献[16]。
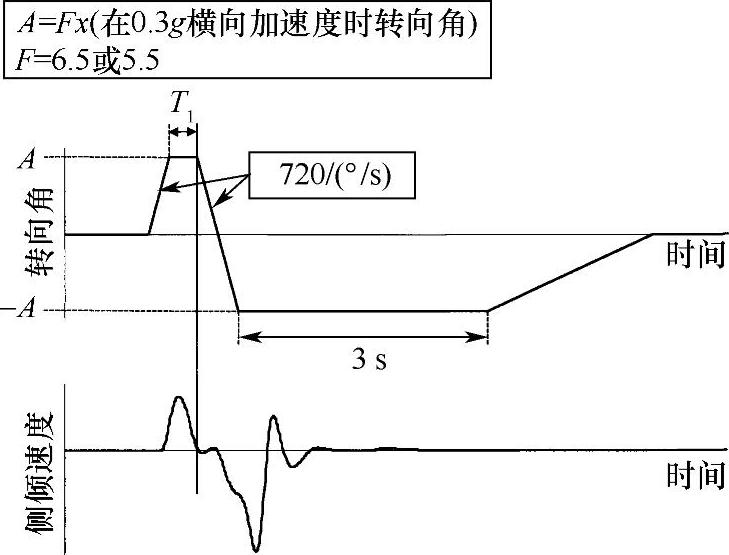
图7.5-7 在“鱼钩”试验时转向角输入随侧倾运动的变化
其他的试验方法,如行驶稳定性系统试验(电子稳定性程序EPS、动态稳定性控制DSC,在美国是车轮滑转电子控制ESC)的有效性,正在制订。评价配备ESC汽车的稳定性和躲避性(反应性)见专门的转向方式[12]。在静止的正弦的第二个半波保持时间为500ms的正弦形转向角输入方式似乎得到采用,并可清楚地区分出配备ESC的汽车和未配备ESC的汽车。在转向性能试验结束后通过横摆速度下降就可检验汽车稳定性,并且通过达到的横向偏移就可检验汽车反应性。
5.前景
如上所述,现已有不少客观的试验方法。当然,它们只能反映在精确定义试验边界的人造的行驶条件下的行驶性能。利用至今取得的、在适用上有一定限制的结果不可能评价汽车整体行驶性能,必须进一步开发其他一些试验方法。这些方法包括垂直动力学,还要考虑作为控制器的驾驶人的能动性。
已进行了一些研究工作,从中找出,在行驶中什么样的物理学运动参数会被人们察觉和在运动参数的强度方面或多或少被感受到“好”或“坏”。人们试图在规定的行驶方式下不断寻找驾驶人的主观评价和客观的测量参数之间尽可能好的相关性。在很多研究中[7],德国汽车工程研究联合会/汽车公路局(FAT/BAST)组织众多的标准驾驶人和试验驾驶人按ISO标准进行车道变换和在州公路上踩加速踏板行驶试验。据报道,转向角输入到建立横摆速度、横向加速度和航向角之间的时间延迟严重影响驾驶人的主观评价。
至今常用的相关性多项式[8]受到质问,并且由于不断缩小的现代各种车型之间的差别(至少在通常的行驶状态)而不再轻易地把某种车型定义为目标的导向。操纵定位的多项式被视为较好的方法[9]。在该多项式中,驾驶人通过行驶动力学状态可以按他的要求调查问题。在闭环控制回路中驾驶人操纵更多地移到中心点。在单独设定的要求等级中应分析驾驶人与行驶动力学有重大关系的控制操纵和主要要关注行驶误差和操纵误差。在参考文献[15]中提到的方法可满足这些要求,并通过行驶模拟器试验找到驾驶人准则(预见时间、平均频率等)和主观评价之间的很好的相关性。驾驶人准则与参考文献[13]中的准则类似,可从驾驶人/汽车的整个闭环控制回路得到。FAT/BAST的其他研究[17]是针对垂直动力学干扰对驾驶人/汽车整个闭环控制回路的影响,并得到主要的横摆运动和侧倾运动进入干扰评价的结论。
在这些研究工作中获得的知识,在未来还可以加紧进行人的观察、判断和客观的行驶动力学参数相关性试验。这样可以客观地、基本地描述更大范围的行驶性能,不断改善底盘开发中的系统学方法和适应不断进步的技术要求。但按目前的认知水平,主观评价仍将对汽车总体行驶性能作出最终裁定。
需要关注目前正在准备的交通事故预防主动安全性的欧洲“新车鉴定程序(NCAP-New Car Assessment Programme)”计划[10]。不管驾驶人为避免交通事故,平稳驾驶或在较早时间通过汽车反应或转向力矩反应洞察和控制危险的行驶状态做得多么好、要在干燥路面上再现行驶技巧,如在弯道制动、直线行驶制动距离等,单纯的开环行驶技巧是无法胜任的。因此,欧洲NCAP计划只能评价交通事故预防的一个方面。
参考文献

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。