



1.概述
在7.1节中已讨论了出现轮胎侧向力的各种原因和由于车轮转向角的变化如何影响侧向力的各种因素。车轮转向角是由汽车行驶动力学控制器设定的。与设计上确定的运动学的、弹性的转向角度校正不同,这些侧向力不是由外力和外力矩作用的结果,而是主动的反应,并可用由多个输入状态参数和行驶动力学状态参数的函数表示。按此方法,可确定控制策略。这些控制策略影响行驶动力学性能,直至物理边界,并明显地偏离已定的行驶方式和在所有可能的条件下影响行驶性能。
如果预先到列入主动转向范畴的各种伺服转向不断发展,则首先是后桥行驶动力学主动转向系会进入批量装备。原因是由于在后桥上瞬时建立的侧向力影响,和由于汽车航向角(浮角)减小,在没有使用行驶动力学状态参数反馈控制时,或甚至只简单地将后轮转向与前轮转向机械耦合,主动转向可改善汽车在高速行驶时的不稳定行驶性能。
在很早前,为研究目的,已实现前桥主动转向,该前桥主动转向系统在前轮上的转角可能与由驾驶人设定的转向盘转向角有明显偏差[1,2]。但这个想法将在成批生产的汽车上使用。直到20世纪90年代中期,才由汽车生产厂家和供货商重新提出来[3,4],并在这期间已开发到批成熟程度,如参考文献[5,6]。在转向时已开始使用计算机,以改善受控汽车的性能和不受驾驶人影响控制汽车。这同样也适用于“巡航控制”系统[7],该系统通过主动地施加转向盘力矩辅助保持驾驶人设定的车道。
在5.5.1小节和7.1节中已经指出,不对称的轮胎切向力(圆周力)产生横摆力矩,使汽车转向。不对称的轮胎切向力可利用制动系统[如电子稳定性程序(ESP)]干预,或直接按驾驶人希望的、为此专门开发的驱动控制部件消除。在驱动功能和转向功能上有一个功能重叠,这是为什么转向系统要在“主动转向系统”这一节中一并提出。
除了像重量、成本、能量需要、可用性和功能安全性外,开发者的主要任务应这样设计行驶动力学的主动转向系统的作用,使驾驶人有好感、不察觉或至少不受干扰地接受主动转向系统。再则,要保证无论如何驾驶人和主动转向系统的互动不会使整个转向系统的性能恶化。不仅在一些国家适用的转向系统规范,而且对安全性有重大关系的底盘电控系统的要求,使主动转向系统进入市场变得困难。汽车工业需要从到目前为止的确定的安全评估到概率的安全评估的转变,但目前还没有像飞机制造行业[8]那样普遍公认的安全标准。因此在开发与安全性有重大关系的电控系统时经常使用IEC 61508指令[9],该指令不仅是危险等级定义,而且由危险等级提出的对功能安全和对开发过程的要求。因为IEC 61508指令不是专门针对汽车的,所以还有一个正在开发的、专门针对汽车的标准(ISO WD 26262)[10]。
2.前轮主动转向
20世纪90年代中期以来,具有“线控转向”概念的主动转向不断受到重视,这是从飞机的“线控飞行(fly by wire)”的概念移植到汽车上成为“线控转向”的结果。“线控转向”概念经常理解为转向盘与车轮之间没有机械连接,并与电子控制组合,由机电执行器控制。这种片面的解释是与航空中常用的语言表达矛盾的。因为在航空中没有执行器类型的限制。基于这一原因,这里更喜欢使用较普遍的“前轮主动转向”概念。前轮主动转向包括所有的主动转向,采用前轮主动转向可改善驾驶人与汽车的相互配合。
下面就已知的前轮主动转向的各种方案按它们的功能分类。由于新颖程度不同和在该领域的飞速发展,不提出对前轮主动转向的完整性要求。
(1)伺服主动转向 伺服主动转向特征是驾驶人施加在转向盘上的力矩与控制力矩的叠加。控制力矩是附加的行驶动力学状态参数的函数,它可通过控制器有针对性地修改驾驶人动作,或多或少地给予驾驶人转向辅助、阻止驾驶人转向或与驾驶无关地自动控制转向。伺服主动转向像在当今的转向系统一样,仍然保持着转向盘转角与车轮转向角之间的固定的、普遍的几何关系。
转向系统可分为:
1)操纵力随汽车行驶速度可变的转向系统。早期的机械液压控制器的实例是雪铁龙的转向系统。在该系统中,作为转向角和汽车行驶速度的函数的机械液压执行器产生驾驶人察觉到的回位力矩。在ZF伺服电子装置(Servotronic)上使用的电子控制器,它的伺服作用与汽车行驶速度匹配(见7.4.5小节)。
2)能识别非手动模式、主动转向回转和阻尼转向盘/汽车速度的转向系统。在早期雪铁龙汽车上使用的、高成本的机械液压结构型式是大家熟知的。而采用电子伺服转向系统则是相当简单的[11],在未来将不断扩大应用。因为在经典的机械液压伺服转向系统中没有附加功能,所以其发展的前提是在引入微处理器和电液部件或通过附加组合电动转向力矩执行器情况下可以达到与电子伺服转向系统一样的功能。长期的方案是用电子转向系统替代液压伺服转向系统。
3)自主有效、与驾驶人辅助力矩相匹配的转向系统[7]。它不但可以实现“方向控制(Heading Control)”和“车道偏离报警(Lane Departure Warning)”,而且可在行驶动力学物理边界状况帮助驾驶人。该系统中的一部分还在开发中。它的效果和认可是与能可靠识别汽车周围环境联系在一起的。日产、本田和丰田在日本市场上提供了“方向控制”的车型,与此同时“车道偏离报警”系统也已在欧洲生产。
4)主动转向系统可能的另一个功能,是由一些汽车生产厂家提供的停车入位自动转向。这个功能超越了单纯的通信辅助,迈出了在交通工程中容易掌握的环境中自动行驶的第一步。
(2)机械传动比主动可变的转向系统 机械传动比主动可变的转向系统概念是转向盘和前车轮之间的机械传动比通过调整机构是可以改变的。本田的这类转向系统已投入市场[12]。它利用电动可调的杠杆臂之比(b-a)/b,以根据汽车行驶速度达到传动比的可变性,即传动比是汽车行驶速度的函数(图7.4-56)。按本田采用的工作原理,可得到一个可变的传动比,它是转向盘转角的函数。因此只能在有限的角度范围使用,并在调整机构与转向盘之间需要减速传动。通过小齿轮和齿条之间的传动比匹配可以补偿只能在有限的角度范围调整传动比的不利影响。因为依据本田所用的可变传动比,还可以同时改变行程和转向系统的总传动比,所以伺服作用要与汽车行驶速度匹配。
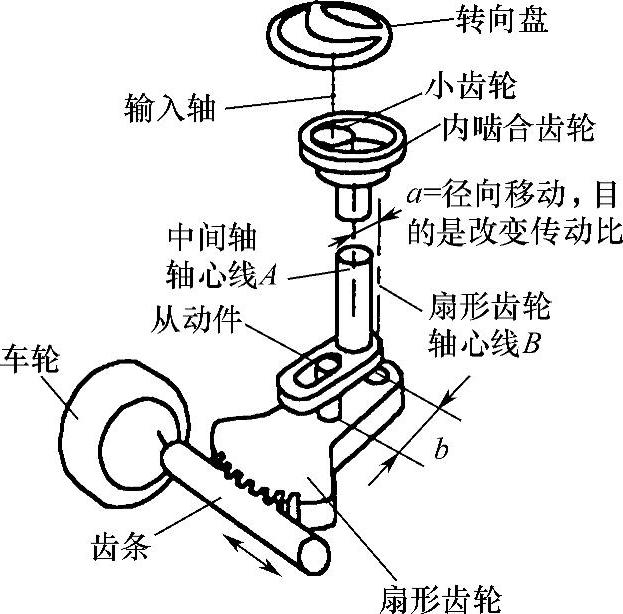
图7.4-56 本田可变传动比转向系统的工作原理[12]
(3)叠加转向系统 叠加转向系统的特征在于通过执行器将附加的转向角度叠加在驾驶人给定的转向角上。附加的转向角度由控制器定义,并用以增加汽车的灵活性和稳定性,以及补偿干扰参数的影响,如补偿汽车两侧车轮在不同附着系数路面(μ-Split)制动时出现的不稳定横摆力矩。此外,作为汽车行驶速度和转向盘角度的函数的车轮转向角梯度在整个转向盘角度范围设计成可变的。与机械传动比主动可变的转向系统不同,叠加转向系统反馈到转向盘上的回位力矩是不变的。
叠加转向系统可使用电或液压执行器。它保留转向盘和转向车轮之间的直接的机械连接,所以在断开执行器时仍保留常规的转向功能。由于这一特点,叠加转向系统要比下面介绍的单纯的“线控转向”系统更容易满足安全性要求。
另一个通常是正面评价的性能是可直接减小在转向盘上相当于伺服转向力矩的车轮回位力矩的机械传递。为产生人工的回位力矩(如在单纯的“线控转向”系统中那样)不需要花费多余的费用,因为可以利用驾驶人施加的转向功。它不会对系统的组合性、重量、成本、可用性、能量消耗等有多大影响。
除了由于控制策略的差别外,叠加转向系统按结构设计型式可分:
1)在转向横拉杆、齿条或转向传动机构外体部分的平移运动叠加。为产生齿条相对转向传动机构外体的相对运动,将由执行器产生的转向传动机构外体的平移运动叠加(图7.4-57)。该结构设计型式的缺点是转向传动机构平移所需的空间大,并要求有高功率执行器,因为执行器的干预没有由于伺服转向辅助而增强。
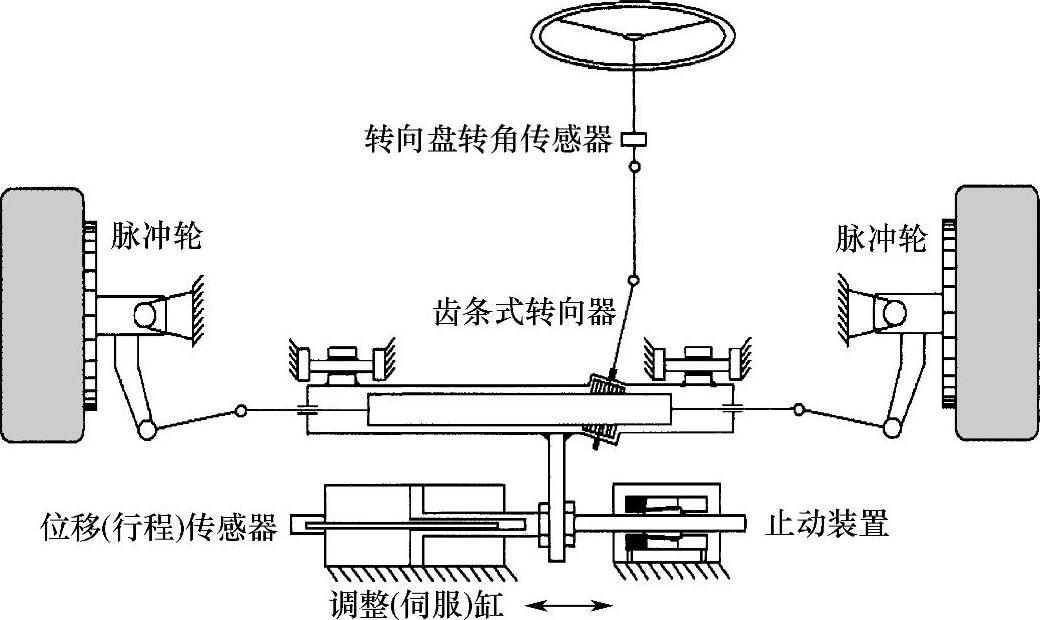
图7.4-57 在交通事故中按转向传动机构移动原理的叠加转向系统、液压执行器和机械止动装置(Fleck R.:主动转向系统结构,慕尼黑工业大学交通研究所2/1996)
2)在转向传动机构和转向盘之间的旋转运动叠加,这种结构设计型式的优点是允许没有机械限制地叠加转向角和执行器的伺服转向辅助。但叠加转向可达到的较大的车轮转向速度对转向伺服系统提出高的功率要求。叠加转向可利用专门的相加传动机构完成(图7.4-58),或通过附加的、可控的旋转运动直接叠加(图7.4-59)。前面一种方案用在宝马汽车的主动转向系统上,它使用了一个“+(加)行星齿轮传动”或“综合行星齿轮传动”,以保持附加所需的齿轮啮合最少[见(2)]。丰田使用后面一种方案,以达到可变的转向传动比。
与(2)中已介绍的机械传动比主动可变(机械传动比的有效变化)的转向系统不同,叠加转向系统使用叠加原理。其优点是转向力的大小(力矩转换比)与察觉到的角度转换比无关。由于可能产生计算机控制的转角分量,明显提高了对安全性设计的要求。
比较叠加转向系统的这两种方案,丰田选择的方案由于机械结构简单而受到青睐,但在改变电动机转速时出现转子与转子轴惯性力矩的反作用,所以为转动执行器需要较大的能量传递和信号传递。
按叠加原理工作的主动转向系统可利用行驶动力学控制器产生一个与驾驶人直接设定的转向盘转角有偏差的转向角。它们间的差别从功能角度将在(5)中的“线控转向”转向系统中处理,作用在车轮上的一部分转向力矩还会机械地传递到转向盘上。
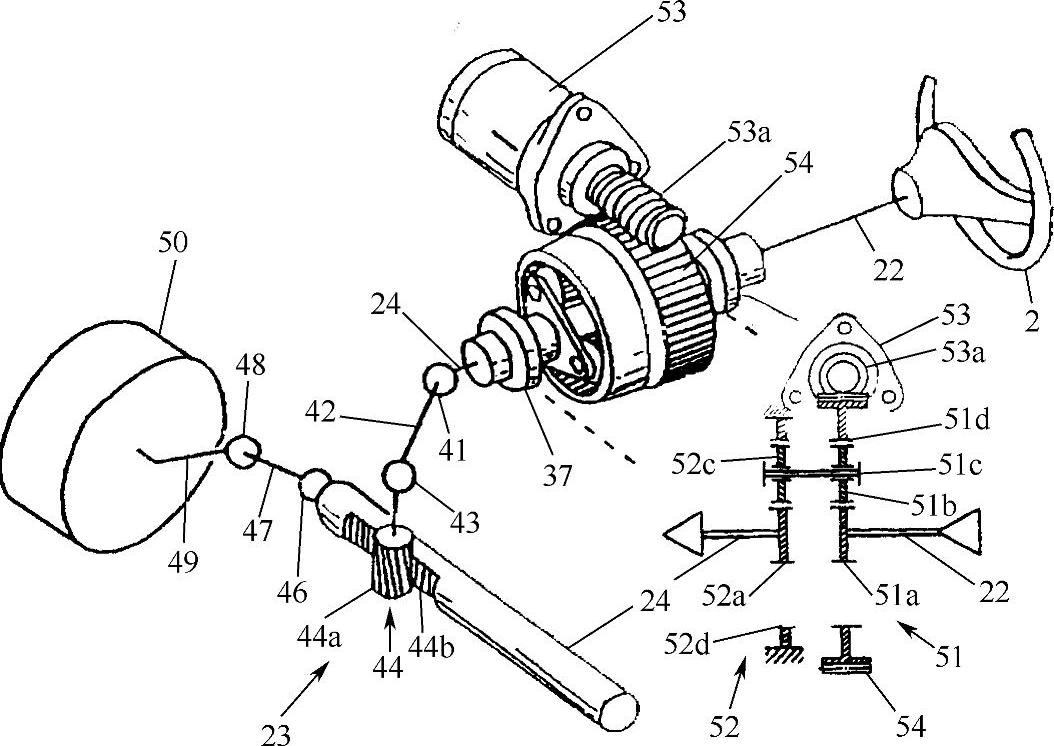
图7.4-58 利用行星齿轮传动按角度叠加原理工作的叠加转向系统,第二个行星齿轮传动补偿传动比变化(本田,德国专利说明书4326355)
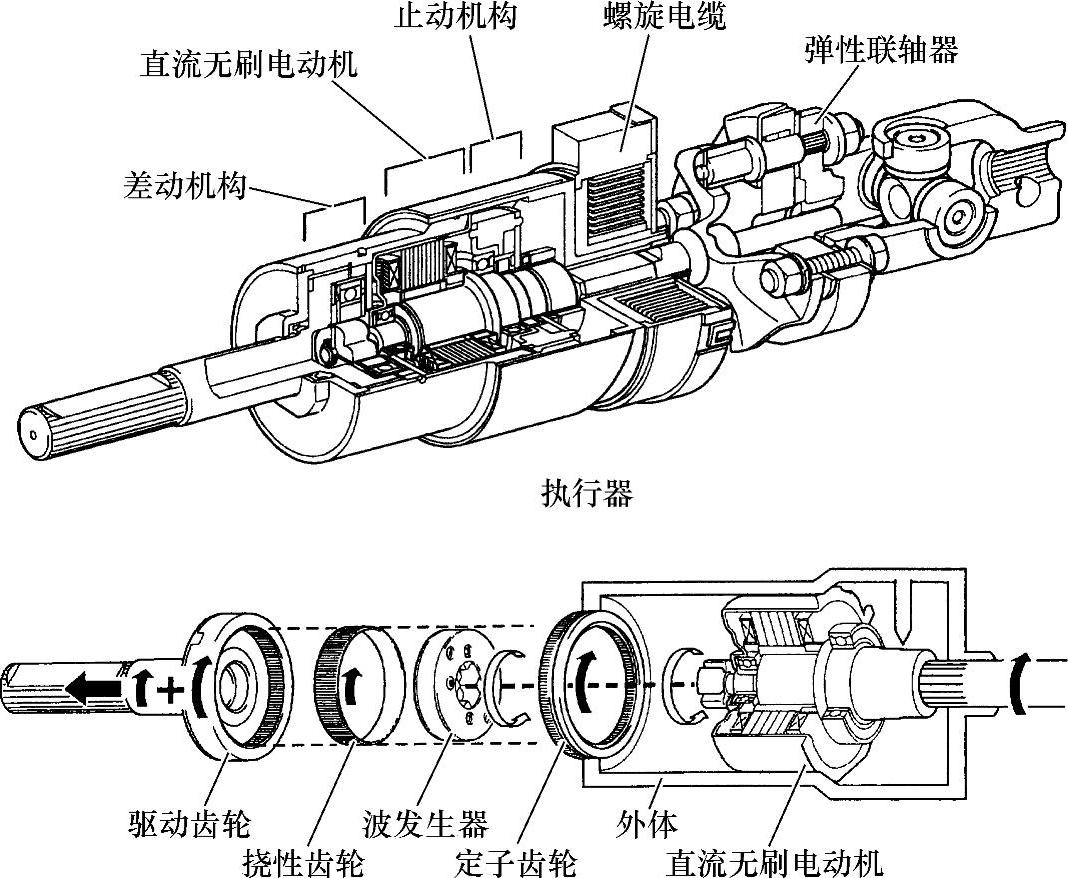
图7.4-59 丰田陆地巡洋舰的叠加执行器,与转向轴一起转动的执行器布置在转向盘与转向传动机构之间,使用“温和驱动”传动机构以闭锁电磁离合器(资料来源:丰田)
(4)叠加转向系统与可控的伺服转向系统组合 叠加转向系统与可控的伺服转向系统组合可借助较大工作范围的控制器自由设计转向系统的两个状态参数,即转向盘与车轮之间的角度配合和转向盘力矩(图7.4-60)。在称为主动前轮转向(AFS—Active Front Steering)的概念下,由宝马与ZF公司(ZF转向系统)一起开发了这种组合的转向系统[5,6],与早先的转向功能样品(图7.4-61)不同之处是叠加控制器部件和可控的伺服转向系统的组合用于系列方案上(图7.4-62)。
在世界范围率先由宝马使用的、具有“线控转向”功能的主动转向系统,除分开控制
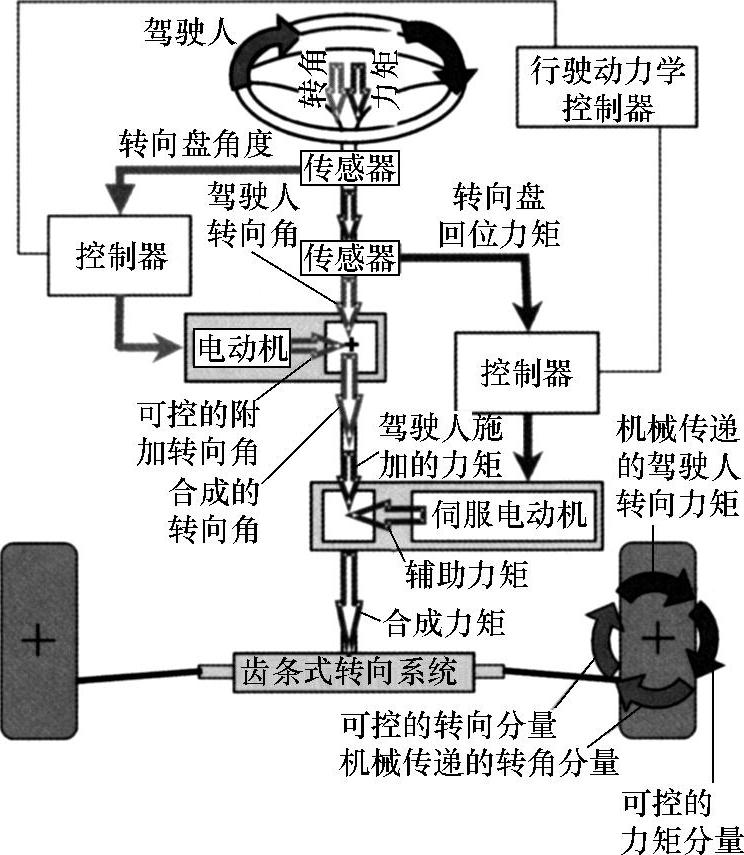
图7.4-60 叠加转向系统与可控的伺服转向系统的组合[Pauly,A.:AFS线控操纵重要部件,VDI工作范围汽车与交通技术,汉堡(Hamburg),2001年6月12日]
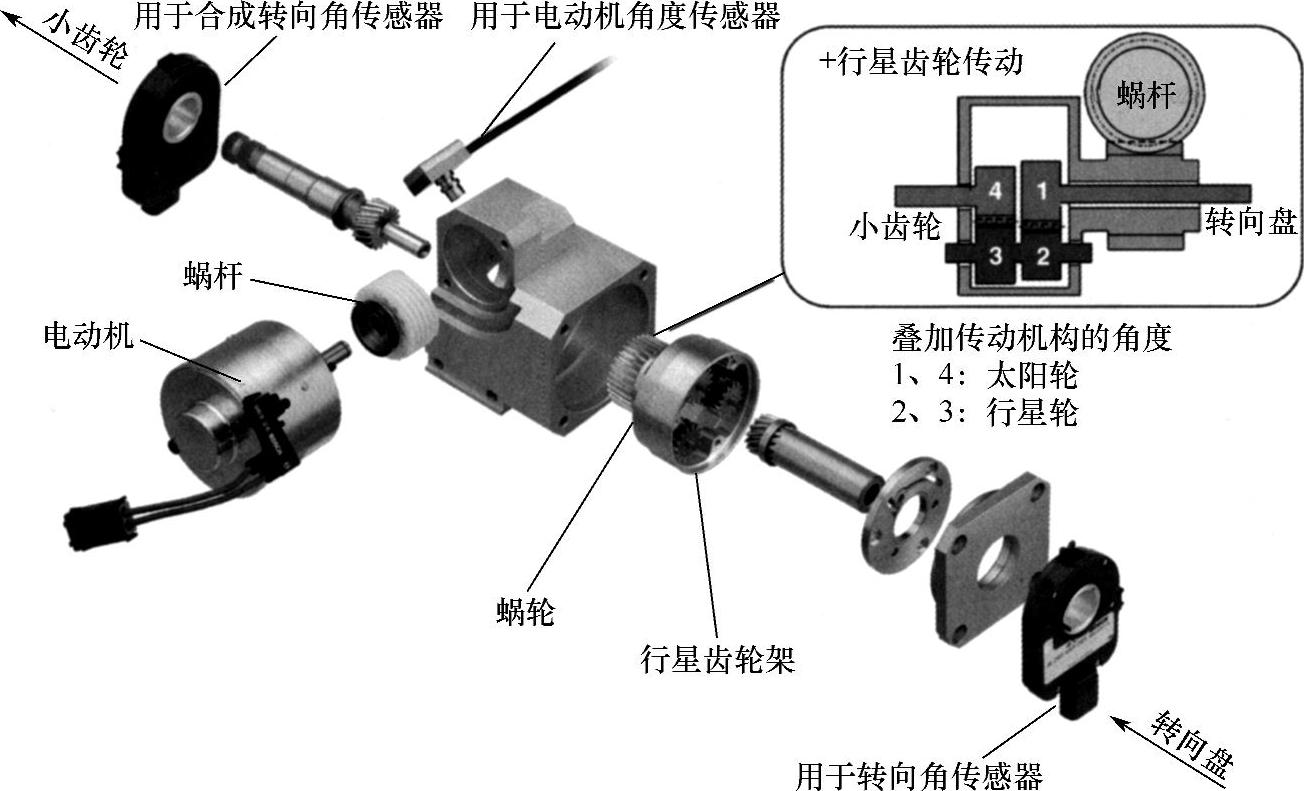
图7.4-61 宝马AFS角度叠加执行器功能样品[Pauly,A.:AFS,线控操纵重要部件,VDI工作范围汽车与交通技术,汉堡(Hamburg)2001年6月12日]
转向力矩和可察觉的转向传动比外,还可控制转向干预,以稳定汽车行驶和补偿各种干扰对转向的影响。此外,还可通过转向系统的软件与汽车转向性能匹配。与下面要研究的“线控转向”系统最大的区别是这种转向系统与前车轮的直接的机械连接,在正常行驶时也是如此。由于转向系统的这个特征,可保证“真实的”转向感觉和将行驶路面状况的细微变化反馈给驾驶人。此外,直接的机械连接可同时连续、主动显示出转向盘回复到原来手动的机械状态。以这种方式可实现相对简单的安全性设计。该设计方案除了很少的系统组合件和高的可用性外,还有成本、重量、组装件的优势。
(5)“线控转向”转向系统 在属于“线控转向”总概念的转向系统中,在转向盘和转向车轮之间,在正常行驶时没有直接的机械连接。通过可控的液压或电动控制器使车轮产生转向角。如同在叠加转向系统中那样,转向盘转角和车轮转向之间取消了固定的运动关系。此外,没有产生直接的车轮回位力矩的传递,并利用转向力矩模拟器产生可察觉的转向盘力矩。如果使用主动的、可控的模拟器,则可以按人机工程学和生理—心理学观点设计最佳的转向盘力矩。
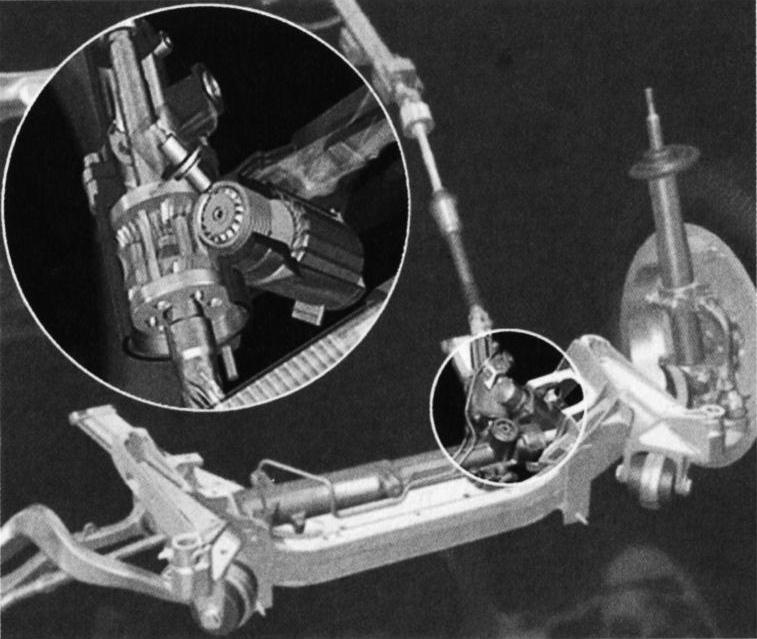
图7.4-62 宝马组合的AFS执行器。断面:角度叠加执行器[Köhn,P.;Wachinger,M.;Fleck,R.:宝马主动转向系统的结构和功能。HdT会议“底盘技术,”,2003年6月]
转向盘不再用作(至少不再是)将驾驶人施加的转向功的一部分供入转向系统中,而可考虑采用另外的操纵机构型式。为此,尝试将从飞机那方面来的、熟悉的操纵机构移植到汽车上[13]。需要注意的是在汽车上出现的汽车轮辐和整个汽车的惯性力,引起汽车横向、纵向、摆动(俯仰)加速度的快速变化以及干扰引起的反作用。基于这一原因,在参考文献[14]中使用了液力阻尼、对干扰力不敏感的手盘大小的转动手柄“侧手柄(Side Stick)”。对该领域的未来发展是有兴趣的,因为作为人机工程设计的转向盘可以替代一直沿用至今的转向杠杆。其原因是通过操纵机构的间接传动比可提高转向精度(虽然会达到大的车轮转向角)。今后还将利用伺服转向系统上的转向性能,以保持在伺服系统失效时还有一个最小的可操纵性。(https://www.xing528.com)
只有转向盘的这个方案才对“线控转向”系统的安全性结构有重大影响。为满足安全性要求,必须要有可靠的“防失效功能(fail function)”,它允许在系统中出现多达两个故障。但这个要求增加成本、重量、结构空间、组合性,并降低了可用性。
在采用安全、有效的转向盘回复到原来的手动、机械状态时,为满足安全性要求,只需简单的冗余。但转向盘回复到原来的手动、机械状态会限制传动比的直接性和可变性的自由度。因为在干扰的情况下,功能下降,传动比突然改变,不应对驾驶人提出过高要求。图7.4-63是解决这一问题的、令人感兴趣的方案平台。只要转向盘回复到原来的手动、机械状态,电动转向力矩模拟器就承担电动伺服转向系统的功能。
各“线控转向”转向系统的差别可按下述特征区分:
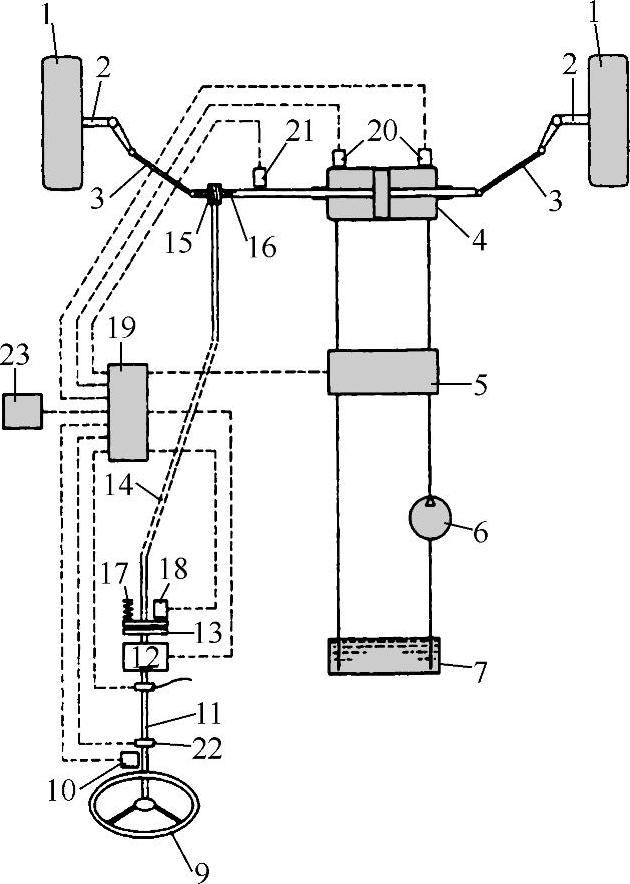
图7.4-63 带电动转向力矩模拟器和转向盘回复到原来的手动、机械状态的电液转向系统原理表示。可用转向力矩模拟器辅助机械手动恢复原来层面功能[戴姆勒奔驰专利说明书DE 19755044 C 1]
1)车桥上两车轮共用一个控制器或车轮独立转向。车轮独立转向由于成本高,只在特殊情况使用。
2)机电执行器(图7.4-64)或机械液压执行器(图7.4-63)。
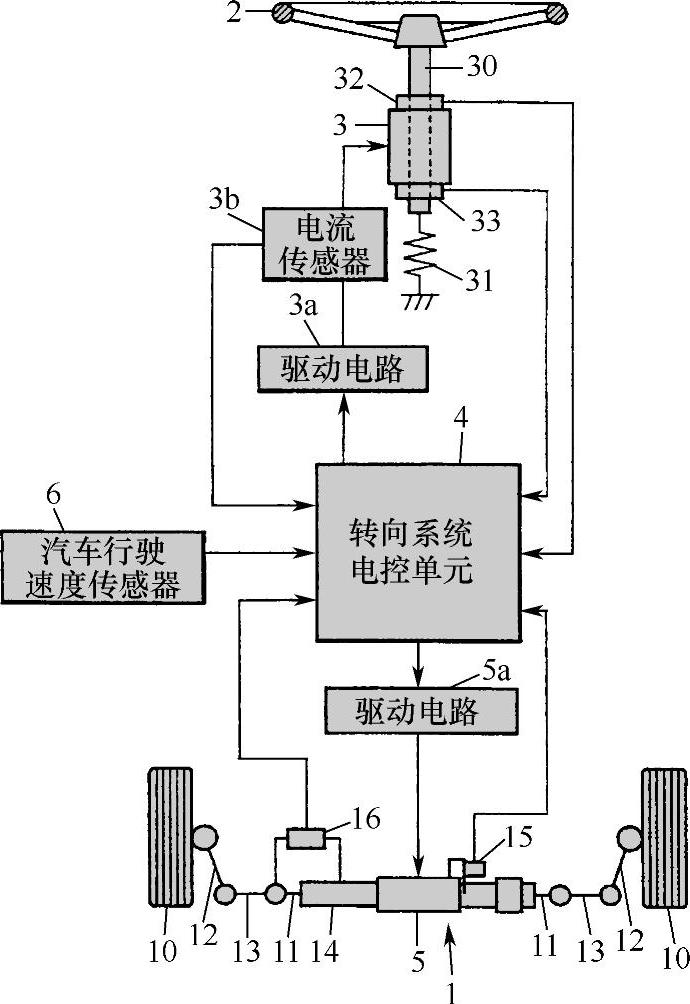
图7.4-64 带电动转向力矩模拟器的机电转向系统原理表示 [Koyo Seiko,DE 19806458 A1]
3)产生转向盘回位力矩方式。不仅优先采用被动的弹簧—阻尼系统,而且采用机械—电子执行器。
4)现有的和设计的转向盘回复到原来的手动、机械状态。文献中是大家熟知的、带离合器(图7.4-63)和静液传动的转向盘回复到原来的手动、机械状态的方案,如专利说明书EP 0818382 A2。
5)用于转向盘和前车轮之间角度传递功能的开环控制算法和闭环控制算法。
6)稳定性控制和干扰参数控制的控制策略。
7)驾驶人—汽车—环境系统最佳协调能力(兼容)的设计策略以及由驾驶人主观的、正面评价的设计策略。
3.后车轮主动转向系统
与前车轮主动转向系统相比,后车轮主动转向系统的优点不仅可直接影响航向角的值,而且可直接影响在后桥车轮上建立的侧向力的瞬时变化过程。在转向功能出现故障时,为改善行驶动力学,一般需要简单的、很小的控制车轮转向角(2°~3°)。因此,较长时间以来一些汽车生产厂家很自然地提供行驶动力学的后车轮转向系统。在较小的转弯圆(半径)和较长轴距的汽车上,如“家庭汽车”和“轻型载货车”,为增加汽车的灵活性和主动性,使用后车轮转向系统具有很大的潜力。在这种汽车上,后桥车轮较大的转向角所需的空间没有像常用的前桥车轮较大的转向角所需的空间影响大。
从安全性方面考虑,对后车轮主动转向系统评价与对叠加转向系统的评价相似。因为在识别后车轮主动转向系统故障时可以认定它处于中间位置(空档位置)或甚至认定它只是简单的断开(脱开)。前提是要确定在中间位置时的后车轮状况。在液压转向系统中,主要的是由于预紧的弹簧可以出现后车轮主动转向系统的故障[15]。在机电执行器中采用了自动闭锁的传动机构。在位置控制或能量供给系统出现故障时不能提供直线行驶位置的反馈信息。但执行器的普遍趋势是向机电执行器方向发展。
(1)没有行驶动力学闭环控制的后轮转向系统 第一个系统(本田,1987年)实现了后轮转向系统与前轮转向系统的机械耦合[16]。严格说来,这个系统只是早为大家熟知的全轮转向系统的特种汽车的专门型式。正当这种汽车最终可达到减小转弯圆(半径)和在多车桥汽车上还可减少轮胎磨损时,在图7.4-65表示的转向系统则可达到行驶动力学目标。在不稳定行驶方式时,通过后轮对前轮的同向转向就可在后桥车轮上加速建立侧向力和减小航向角。这样,在转向角改变时可缩短对横向加速度的反应时间,提高稳定性,因为这可减小横摆速度的过分波动。
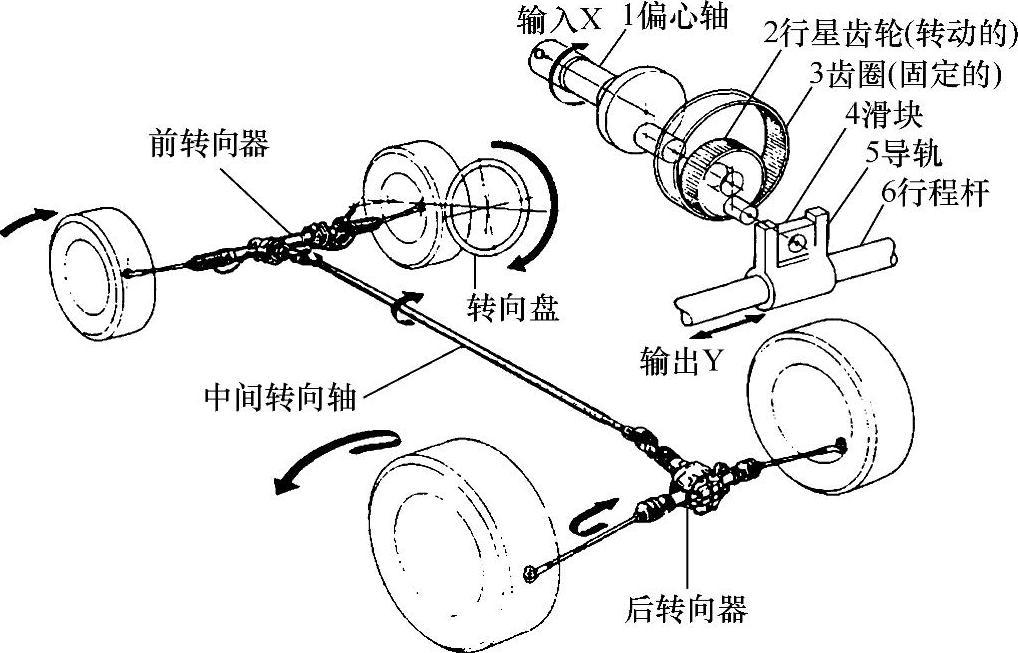
图7.4-65 与前桥机械耦合的后桥车轮转向系统[16]
在选定的实例中,利用专门的传动机构,应这样设计后轮与前轮的转向运动的耦合,即在大转向角时,如在低速出现的大转向角,后轮的转向运动与前轮的转向运动相反。这样可利用后轮的转向减小转弯圆(半径)。
图7.4-66表示的电控机械液压后轮转向是一个重大进步(宝马,1999年)。利用与汽车行驶速度和转向角有关的转向特性场(图7.4-67),可以定义后轮转向角[17]。与汽车行驶速度有关的时间项推迟在后车轮上建立转向角,以在低速行驶范围获得灵活的行驶性能。因为在控制器中没有行驶动力学状态参数反馈,所以宝马转向系统的行驶动力学功能是一个开环控制功能。图7.4-68表示汽车在双车道变换时后轮主动转向系统的状态参数变化。
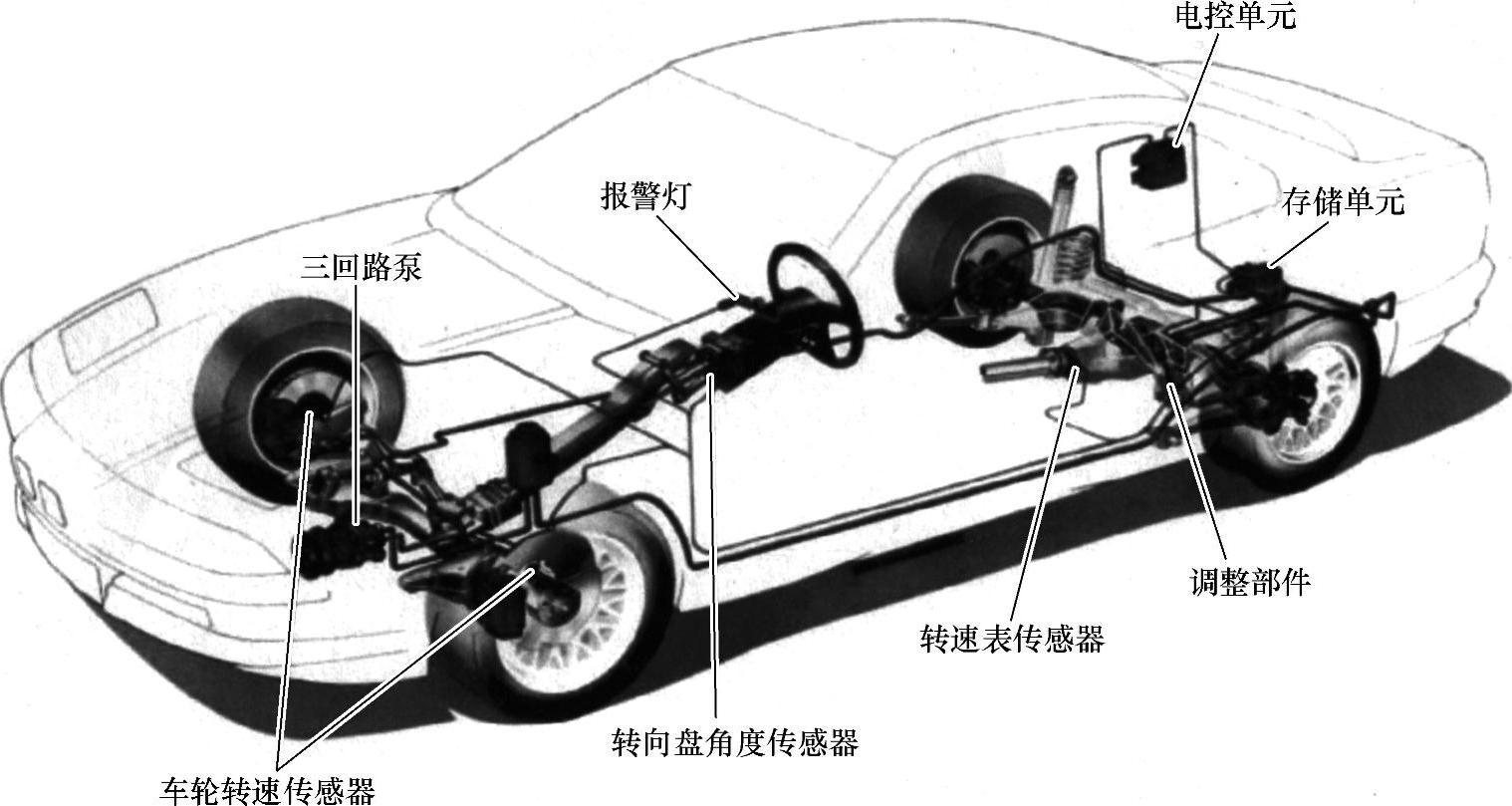
图7.4-66 宝马850 Csi 1990后桥车轮转向系统,总布置及系统[Donges,E.:宝马850 i的主动后桥运动学。汽车评论(杂志)Nr.38,1991]
(2)有行驶动力学闭环控制的后轮转向系统 图7.4-69表示了一个完整的后轮转向系统的特点(三菱,1988)。它包括一个单纯的机械液压开环控制的后轮转向系统,但在控制系统中考虑了行驶动力学状态。利用前轮伺服转向系统中的液压油压力控制后轮转向系统的液压阀。液压阀在不足转向方向确定转向角的大小和方向。在伺服转向系统中的液压油压力差不仅可作为转向速度的尺度,而且可作为前轮上侧向力大小的尺度。通过由后桥上传动机构驱动的液压泵,以与汽车行驶速度有关的液压油体积流量供给后轮转向系统中的液压系统,从而达到所希望的车轮转向角随汽车行驶速度而变的附加关系。
随着传感技术的不断发展(特别是横摆率传感器),日本汽车生产厂家已将后轮转向系统投入市场。它使用行驶动力学电子闭环控制。这样,它不但可以控制外部的各种干扰,而且可以控制在控制器中模拟设定的转向性能的偏差。
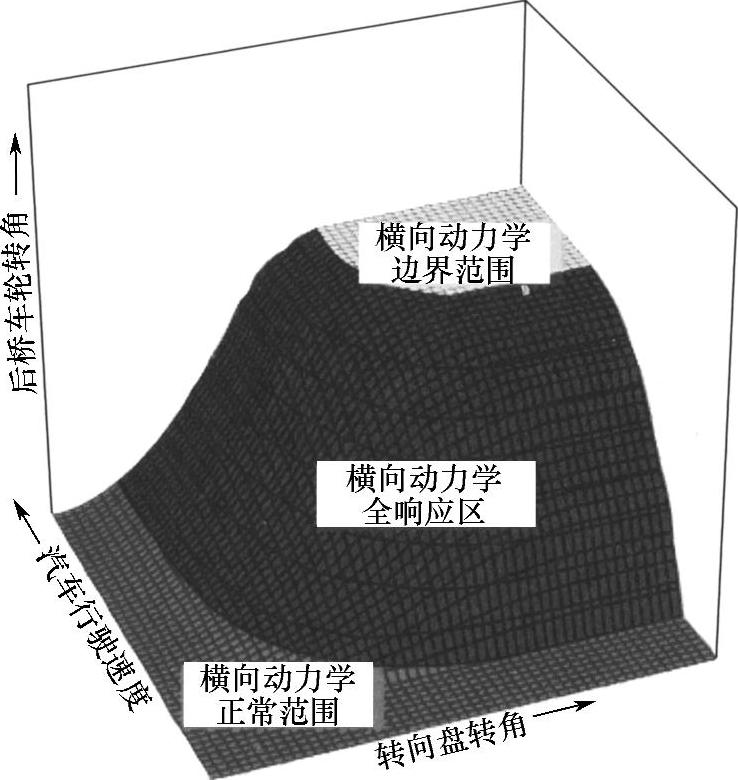
图7.4-67 后桥车轮主动转向系统开环控制中作为转向盘转角和汽车行
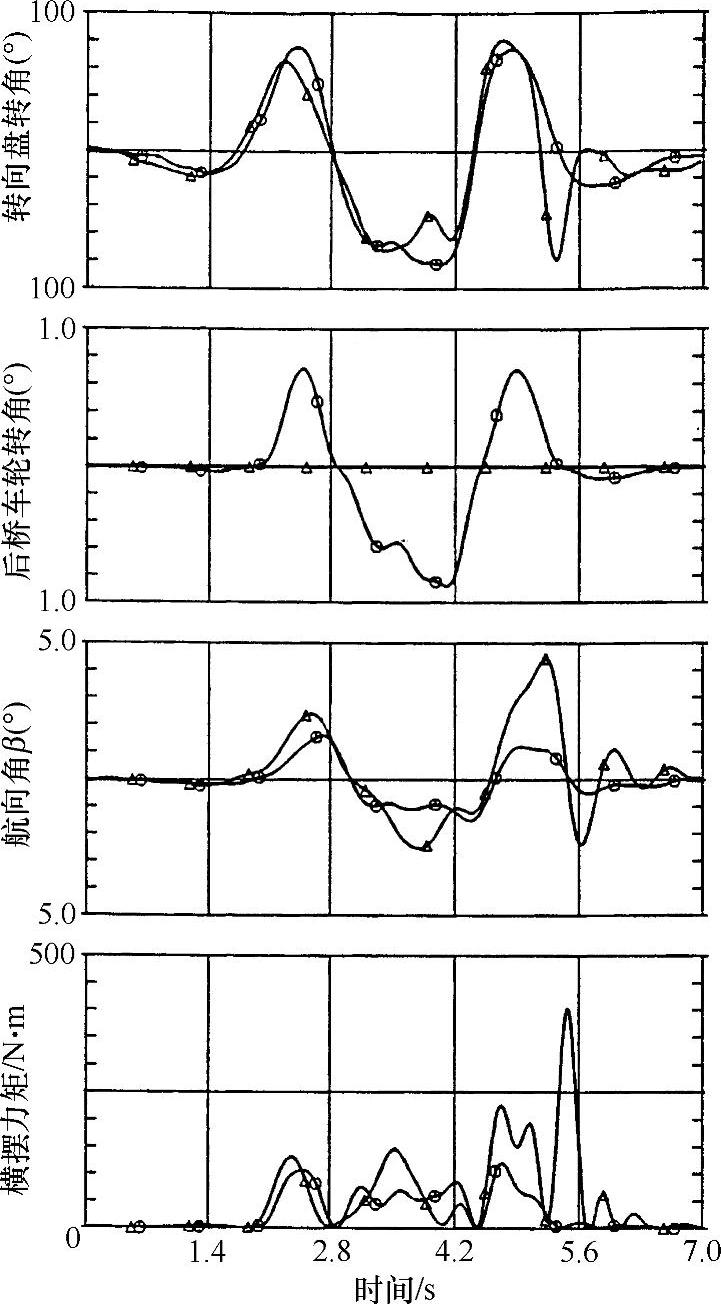
图7.4-68 带或不带后桥车轮转向系统的双车道变换实例在双车道变换时带后桥车轮转向系统的航向角、横摆力矩变化得到明显改善[17]
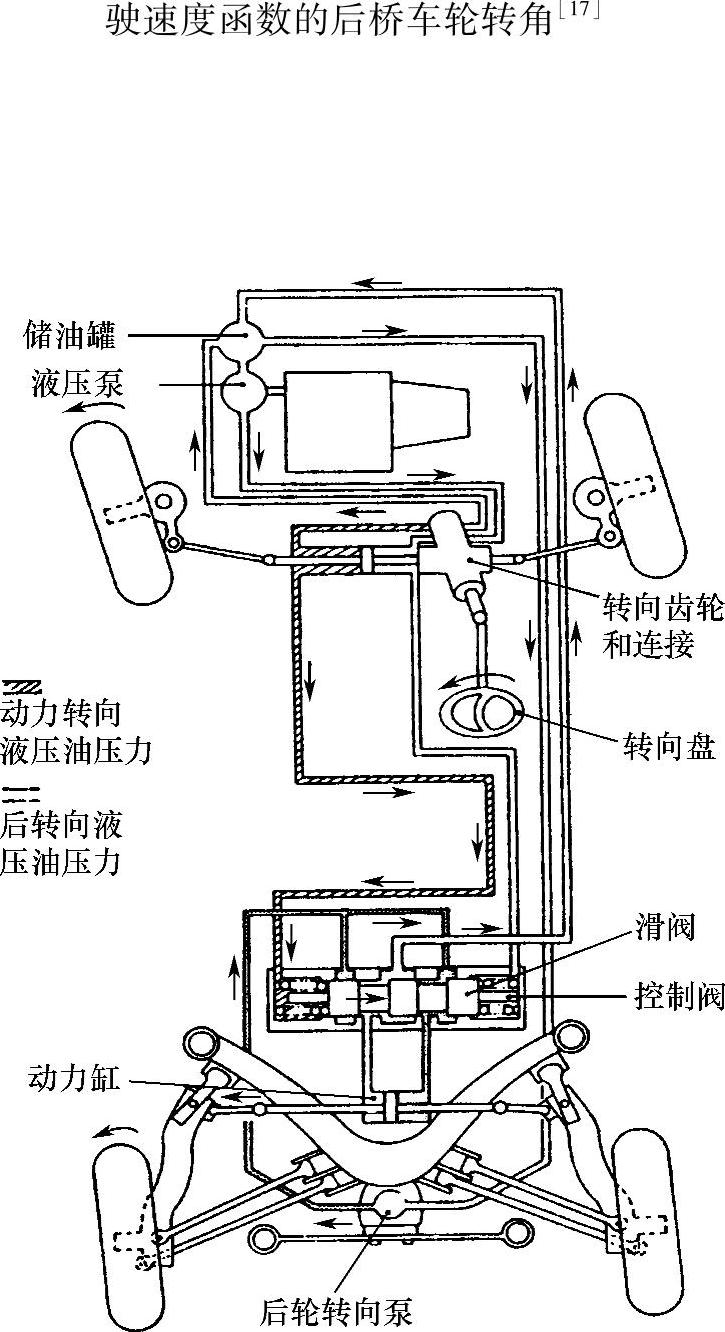
图7.4-69 1988年三菱后桥车轮转向系统原理表示[Yamaguchi,J.:Global视野。汽车工程1998年4月]
在欧洲,一些汽车生产厂家已计划采用新的或进一步开发的电液后轮转向系统。在20世纪90年代初,在对汽车领域的反向市场状况调查和对更舒适、更多的被动安全性的营销定位以及直接对用户利益的洞察推迟了后轮转向系统的发展。
随着在机电转向系统中有关重量和成本方面取得的进展,不断采用后轮转向系统是意料中的事。图7.4-70是有机电后轮主动转向系统的丰田Aristo的后桥布置。带电动机的执行器结构、减速器以及心轴和螺母见图7.4-71。
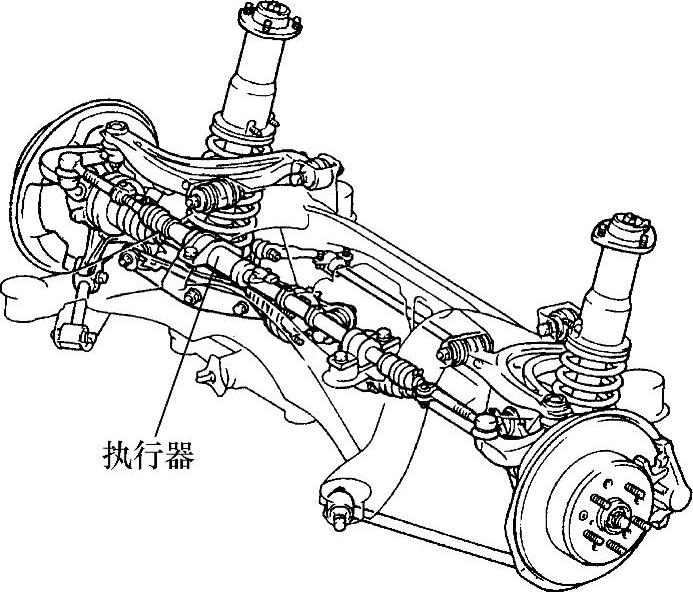
图7.4-70 有后桥车轮主动转向系统的丰田Aristo后桥布置[丰田:技术信息,Aristo车型,1998]
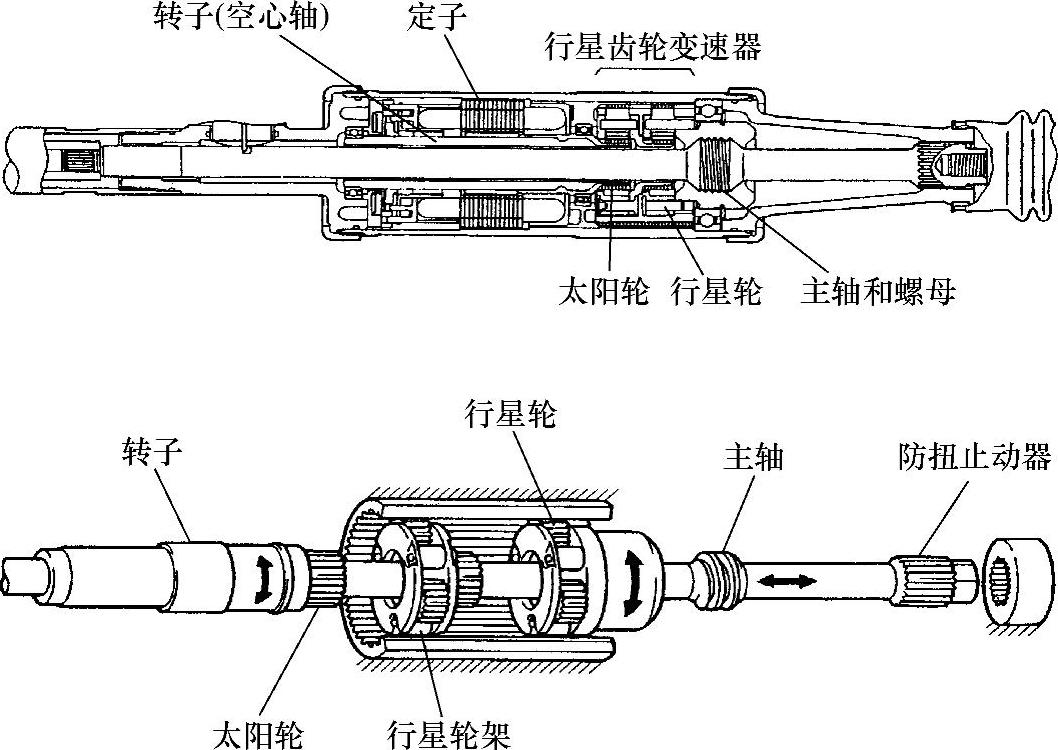
图7.4-71 丰田Aristo后桥车轮主动转向系统的机电执行器[丰田:技术信息,Aristo车型,1998]
叠加转向系统与可控的伺服转向系统的使用(驾驶人可直接察觉到作为后轮转向系统的这些功能)推迟了可控的后轮转向系统的成批使用。此外,由于底盘(首先是轮胎方面)的技术进步减小了航向角,对后轮转向系统的必要性产生怀疑。通过后轮的不足转向增加后轮侧向滑动梯度,使转向盘转角增加,这样会限制后轮主动转向系统的应用潜力。借助前轮主动转向系统就可消除后轮主动转向系统的应用限制。再则,前轮主动转向系统和后轮主动转向系统的组合,可以进一步使横摆角和航向角动力学隔离(见7.1节)。由此可得到:由于前轮主动转向系统和后轮主动转向系统组合的高行驶动力学潜力,可以期待有高行驶动力学响应的汽车后轮主动转向系统的复兴。
利用为传动系开发的专门的差速器和分动器,利用车轮切向力可以产生一个可控的横摆力矩,可以在同样的行驶动力学潜力下对后轮主动转向系统构成竞争[18,19]。在5.5.1小节中已对可变的驱动力矩分配和倒拖力矩分配进行了仔细的讨论。
参考文献
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。