



在悬架运动和转向运动时车轮悬架运动学决定车轮的空间运动。由于车轮的位置及轮胎与路面的位置的重要影响,车轮悬架运动学分析起着重要作用。汽车开发过程开始,一旦车桥方案确定,就可设计车轮悬架和部件的CAD。在接下来的开发阶段,利用整车模型在仿真计算中判断车桥运动学对行驶性能的影响,并在实际的行驶试验中优化。
一些运动学特征参数已标准化(ISO 8855/DIN70000)。完整的说明见参考文献[1,2]。
1.车轮升程运动学
外倾角γ表示在水平路面上车轮对垂直线的斜率(倾斜)。它影响轮胎与路面间侧向力的传递。在常用的负外倾角时,车轮上部指向汽车中心,车轮像倒下的圆锥体在圆轨道上滚动。如果车轮的滚动被悬架阻止,则产生一个朝向汽车的侧向力。另外,由于负外倾角,轮胎内肩部承受较高的载荷,并在侧向力作用下使轮胎压印面变形,从而使轮胎内压印面范围减轻载荷以得到部分补偿。因此,在负外倾角时,轮胎侧向力传递潜力(能力)要高于正外倾角时的侧向力传递潜力(在提供的附着系数以内)。在特别小的横断面(小的高宽比)轮胎上,车轮对路面力图达到0°外倾角,以避免车轮在轮胎边缘工作[3]。在各个车轮悬架中,在弹跳时外倾角变化至少应部分补偿在弯道时的汽车侧倾角,以免在弯道外的车轮出现正的外倾角。刚性车桥在这种情况下具有在弯道行驶时车轮对路面的外倾角保持不变的优点。如果在车轮顶视图上向前、向内表示车轮,则前束角是正的,否则是车轮外倾。在直线行驶时,在角度为“分”范围的小的、固定的前束角在轮胎压印面上产生很小的侧向扭转应力。由此得到左、右相反的侧向力,它们预张紧车轮悬架中的弹力,并消除在前桥上横拉杆转向机构和转向传动中可能存在的间隙。这样,汽车可以快速地反应输入的转向角并稳定的往前行驶。
在悬架运动时,前束角随车轮升程而变化,并影响汽车的自转向(复原)性能。这称为滚动转向或摆动转向。这里对行驶性能有重大影响的是在悬架弹跳时前束角的变化,即在弯道外有较高车轮载荷的车轮时。因为后桥不直接受驾驶人控制,所以通过弹性行程或在外力作用下(见7.4.2小节弹性运动学)调整转向角(尽管转向角很小),对汽车的行驶性能是决定性的。所以,如在后桥悬架弹性跳动时,随着前束角的增大会产生不足转向。在不平路面,在整个弹性行程前束角的很大变化引起低频的转向力矩波动,从而破坏汽车车道保持,所以应避免。
可以将车轮悬架的空间运动(特别是车轮支撑点和车轮中心点的空间运动)投影到车轮中心的纵向平面上(侧视图)和投影到横向平面上(后视图)。
瞬时极点是表示旋转运动瞬时中心在当时平面上的点。纵向极点和横向极点(图7.4-1和图7.4-2)两个极点可等效地看成车轮悬架到车身的连接点。从这两个极点分别做射线,这些射线垂直于车轮悬架观察点的速度。如果将等效的车轮悬架想象为一个与极点射线垂直的车轮支撑点的直线运动,则与直线运动垂直的力不会产生车轮支撑点的运动。通过极点的纵向力和侧向力的这样的力的分量直接由车轮悬架的导杆承受,其他的力使悬架和车身运动。极点射线与水平线的夹角决定支撑在车轮悬架导杆上的力的大小,这个夹角也称支撑角。
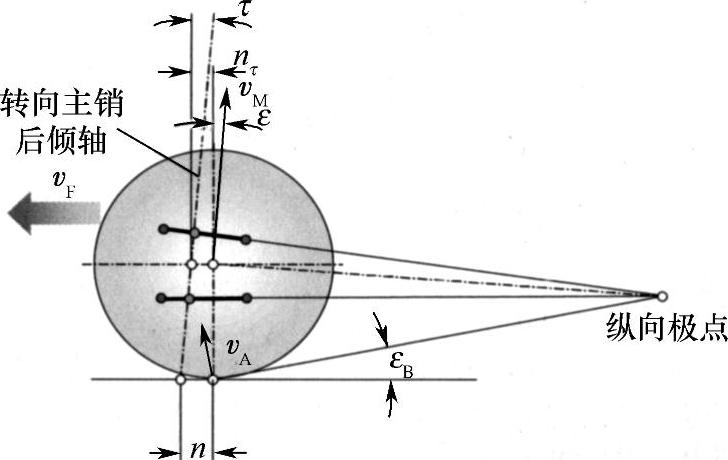
图7.4-1 车轮侧向视图(前桥)
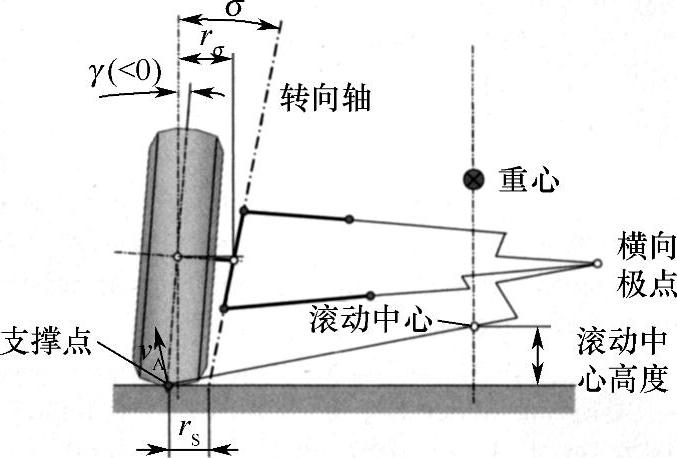
图7.4-2 车轮后视图(前桥)
在制动时,由于制动力产生车轮支撑点偏移和轴载的动态转移。如果这些偏移和转移的结果通过纵向极点反映出来,则可以说是100%的制动前倾(点头)补偿,因为没有出现悬架运动。制动前倾补偿与轴距、重心高度和制动力分配有关。制动支撑角εΒ则与车桥有关,并可用从纵向极点到支撑点的极点射线的斜率表示。因为制动力矩通常支撑在车轮悬架上,所以可以想象车轮和车轮支架几乎为闭锁状态。这样,车轮、车轮支架整个系统和车轮支撑点绕车轮悬架的纵向极点转动。作为制动力的作用点的车轮支撑点的运动主要影响制动支撑角。
从纵向极点到车轮中心点的极点射线确定极点射线的瞬时速度。如果这个瞬时速度有一个向后的速度分量,则称为悬架的倾斜角。与橡胶支撑组成车轮悬架的纵向悬架不同,车轮悬架倾斜角对汽车行驶舒适性不再有大的作用。但悬架倾斜角充当通过万向轴驱动时的驱动支撑角ε。这时车轮悬架在稳定状况,驱动力作用在车轮中心。车轮中心到车轮支撑点的偏移力矩就是驱动力矩,并支撑在减速器上。这样,车轮可相对车轮悬架转动,车轮支撑点不再绕车轮悬架的纵向极点转动,而是与车轮中心点平行地运动。作为驱动力作用点的车轮中心点的运动对驱动支撑角有很大影响。在前桥负的车轮悬架倾斜角和后桥正的车轮悬架倾斜角时可得到起步后倾补偿。在刚性车桥时,驱动力矩支撑在车桥体上。可以想象车轮和车轮悬架几乎为闭锁状态,并且驱动支撑角等于制动支撑角。可反转的车轮支架固定的中间轴减速器可增大驱动支撑角,而同向转动的车轮支架固定的中间轴减速器则减小驱动支撑角。
横向极点表示在车轮横向平面车轮支撑点相对车身的运动。出于对称原因,两个半桥的极点射线在汽车中心面相交,并可确定滚动中心。滚动中心与前、后桥的连接线称为滚动轴,以使滚动轴在汽车弯道行驶时在铰接瞬间开始摆动(侧倾)。滚动轴到汽车重心的距离是惯性力的杠杆力臂,并可确定摆动力矩的大小。该摆动力矩支撑在车轮悬架上。在路面上的滚动中心引起车轮悬架的大的弹跳运动和大的侧倾角。如果滚动中心在汽车重心高度位置,则车轮悬架不再吸收力的分量,也不会有侧倾角。在各个车轮悬架中,高的滚动中心在悬架弹跳时与明显的轮距变化相关,也与车轮支撑点的横向滑转率相关。考虑到牵引力和侧向引导,目前的滚动中心高度很少超过150mm(等轮距的刚性车桥滚动中心的高度可以高一点)。滚动轴的斜率可以影响前、后桥的弹性摆动率的分配。如在后桥上较高位置的滚动中心,相当于后桥的较高的摆动支撑。较高的后桥摆动支撑引起较大的后桥车轮载荷差和后桥车轮侧向引导潜力减小,这是许多汽车过度转向的影响因素。总的车轮载荷差只与重心高度和轮距有关,且对所有的滚动中心高度是不变的。只是滚动轴位置会影响前、后桥载荷的分配。(https://www.xing528.com)
如果滚动中心随悬架弹跳行程而变,则在载荷情况下滚动轴的位置移动。这样在满载时为使汽车行驶性能不受到不期望的损害,必须有目标地相互调整前、后桥的滚动中心高度变化。滚动轴的斜率和前到后的弹性摆动率分配随载荷的增加不要急剧变化。
为得到对称的车轮悬架状态,将滚动中心和滚动轴定义在汽车对称平面中。在单向弹簧时可以确定从横向极点到车轮支撑点的两射线的交点。这个交点不再在中间的纵向平面上,而是侧向偏移。这是物理上的预示,但人们无法直观地看到发生侧向偏移的滚动轴。在有横向加速度时悬架弹性伸缩行程对车身的运动是主要的。
在弯道行驶和侧倾角的作用下,通过反节拍悬架运动得到左右不同的力施加到车轮悬架。合力的多大部分力由导杆承受和合力的多大部分力由悬架承受取决于横向极点高度或取决于在整个弹性行程横向极点高度的变化。如果高度的变化很小或为零(如在纵向导杆轴上),则施加在车轮悬架上的力的分量在弯道外要小于弯道内,即汽车弹跳在弯道外要小于弯道内,由此引起汽车重心升高。重心的升高放大了支撑的摆动力矩。人们称这种不希望的汽车重心升高为“汽车撑起”。可以通过足够的滚动中心高度的变化(取决于滚动中心高度)减少重心升高或完全避免,因为可以通过弯道内、外车轮悬架弹性力变化的不对称减少重心升高。
2.转向运动学
转向不但能引导汽车行驶,而且能向驾驶人反馈行驶状态和路面特性。通过有针对性地设计转向轴可实现这些功能,使在转向时车轮绕主销转动。
图7.4-2是作为主销对垂直线斜率的主销内倾角σ和作为车轮支撑点与转向轴延长线在车轮支撑面的交点之间的水平距离的主销偏距rs。在7.4-1的侧视图中,转向主销后倾角τ同样是主销对垂直线的斜率和转向主销后倾距离n是车轮支撑点与转向轴延长线在车轮支撑面的交点之间的距离。如果使用转向主销后倾偏移值nτ,则转向主销后倾角和转向主销后倾距离可以独立选择。转向主销后倾偏移值在侧视图上是主销与车轮中心间的水平距离。
转向主销后倾角在弯道外偏转的车轮产生负的外倾角。它对轮胎传递侧向力的潜力有好处。转向主销后倾角在弯道内偏转的车轮是正的外倾角。外倾角可减小车轮罩中全偏转车轮的空间。转向主销后倾距离和主销偏距一起可得到绕转向轴的车轮载荷杠杆臂。当由于阿克曼(Ackermann)条件和重量恢复情况(见7.4.5小节),弯道内、外车轮悬架参数不对称变化产生的力矩使转向回位(正)。在弯道快速行驶时,侧向力的影响占优势。该侧向力使在主销上偏移转向主销后倾距离(和使车轮惯性行驶),并同样引起转向回位(正)[4]。
在车轮悬架弹跳时,在侧视图上车轮支架绕它的纵向极点转动,并引起转向主销后倾角与转向主销后倾距离变化。为限制这些变化和不要太影响回位(正)性能,纵向极点要足够远,以限制支撑角的大小。主销偏距反映制动力的杠杆臂。在负的主销偏距时(车轮支撑点在转向轴延长线与车轮支撑面的交点以内),有一个转向角。该转向角阻挡在不对称的制动力时产生的横摆力矩。这样,转向盘的信息反馈受到相反方向的干扰。
作为车轮中心点与主销/车轮轴在后视图上的交点间的距离的主销内倾偏移rσ(图7.4-2)是撞击力的杠杆臂,它影响没有制动的车轮。因此,常将主销内倾偏移称为干扰力杠杆臂。车轮支撑点和车轮中心点间的偏移力矩作为加速度力矩反映到车轮转速中。这时车轮悬架保持不变。
必须考虑在通过万向轴驱动时车轮侧和变速器侧之间的弯曲角引起的驱动力矩的波动部分。在弯曲角为0°时,驱动力的杠杆臂或牵引力的杠杆臂[1]等于干扰力的杠杆臂。对向内、向上弯曲的驱动轴,驱动力的杠杆臂要大于干扰力的杠杆臂;对向内、向下弯曲的驱动轴,驱动力杠杆臂要小于干扰力的杠杆臂。
参考文献
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。