



1.超声波测距
超声波测距的基本原理。超声波作为一种特殊的声波,同样具有声波传输的基本物理特性,即反射、折射、干涉、衍射、散射等。超声波测距就是利用其反射特性,利用超声波发射器不断地发射出40kHz超声波,超声波遇到障碍物后反射回反射波,超声波接收器接收到反射波信号,并将其转换为电信号,测出发射与接收到反射波的时间差为t,即可求出障碍物到汽车的距离s( ,式中c是超声波声速),并将距离用数字显示出来,如图6-2所示。
,式中c是超声波声速),并将距离用数字显示出来,如图6-2所示。
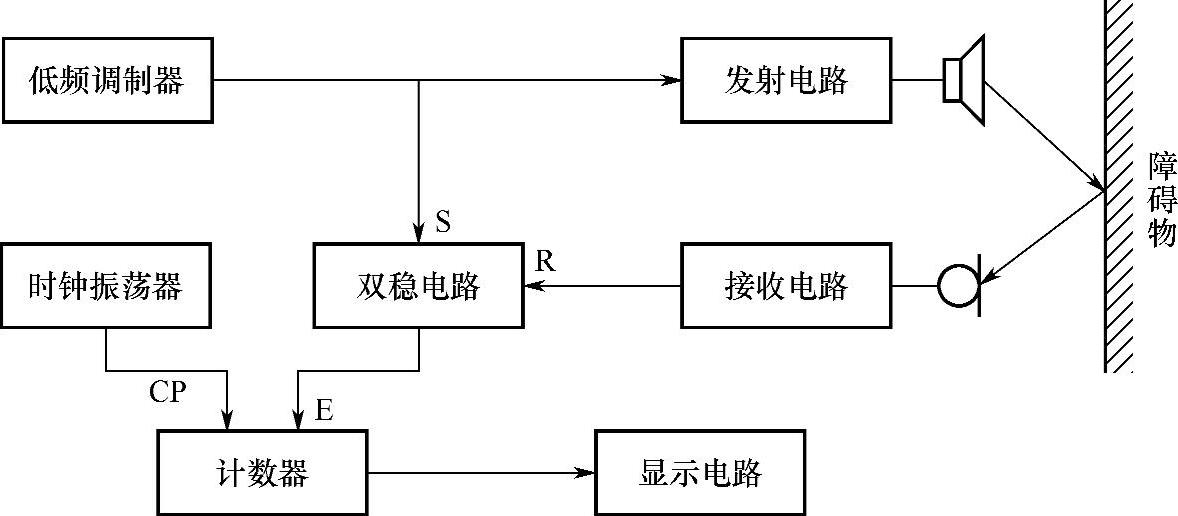
图6-2 超声波测距原理
一般情况下,可以认为声速是基本不变的,如果测距精度要求很高,可以通过温度补偿的方法加以校正,几种温度下的声速见表6-1。
表6-1 声速与温度的关系

图6-2中的发射电路在发射受低频调制的超声波的同时,使双稳电路置位,此时计数器的闸门E被打开,时钟信号开始进入计数器,而当接收电路接收到反射波时,双稳电路复位,计数器闸门E被关闭,时钟信号被切断,数据被锁存,然后经译码驱动在显示器上被锁存的数值。假设声速为343m/s,则时钟振荡器的频率为343kHz时,即可认为显示器上的读数只需要170.15kHz,因为要考虑超声波来回的双倍时间。
因声波速度小于光速,超声波测距多在车速甚慢的倒车测距时使用。倒车时,要求对水平方向更大宽度范围内的障碍进行预测,因而接收传感器一般使用长轴在水平方向的椭圆形扬声器,如图6-3所示。
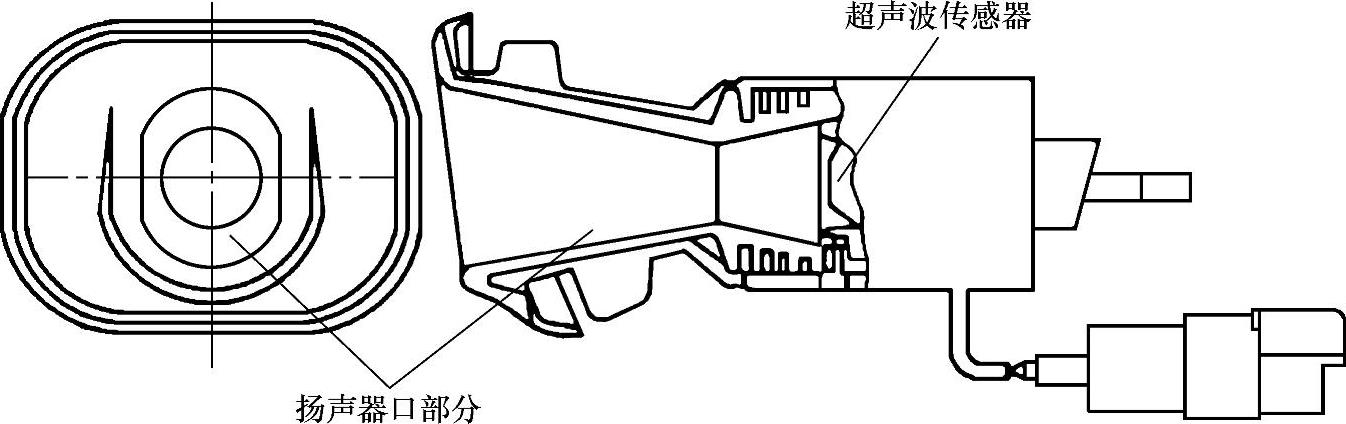
图6-3 超声波传感器及扬声器图
2.激光雷达测距
早期的激光雷达测距利用车辆发出多支激光束,根据被障碍物反射回来的时间差来计算车与障碍物的距离。目前使用的扫描式激光雷达不单能确定前方障碍物的距离,而且能确定其方位。它一般安装在车辆前端的中央位置,将测得的前面车辆的距离及方位信号送入防碰撞预测系统。
激光雷达的扫描角和视域如图6-4所示,激光束的视域窄并呈肩形,即水平面上较薄,垂直面上呈肩形;激光束可在较宽的范围内快速扫描,并通过激光束的能量密度消除因车辆颠簸引起的误差。
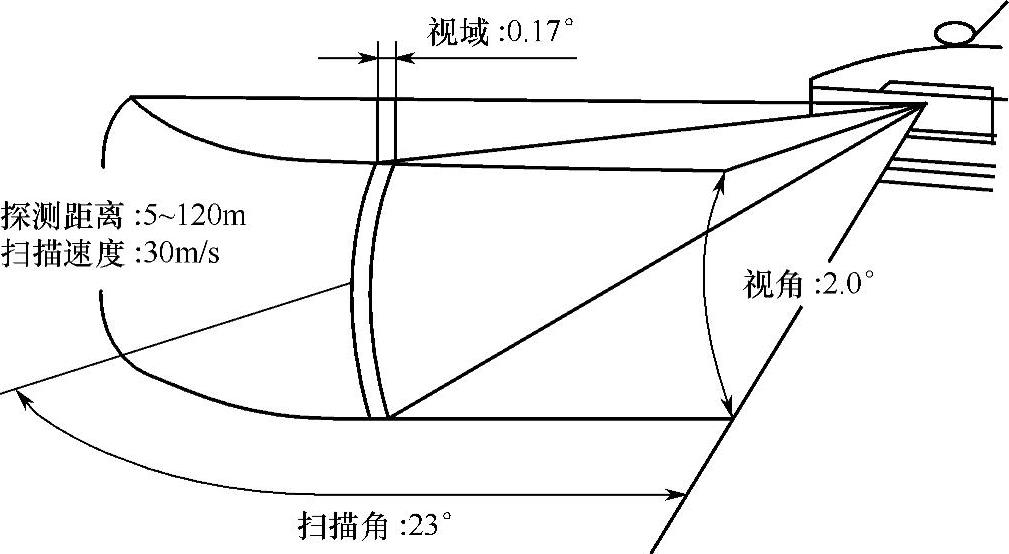
图6-4 扫描式激光雷达的扫描角和视域
通常,激光雷达扫描监测范围在5~120m,以保证在潮湿路面上,后车减速制动后,不至于碰撞到前面暂时停靠的车辆。采用扫描式激光雷达防碰撞系统的工作流程如图6-5所示。其防碰撞的判断是先从激光雷达所获得的车距与方位的数据组中抽取有用的数据,依据后车的动力学特性进行车辆路径的估算。行车路径估算的半径R是根据车速和转角第一次估算的半径R1,以及车速和横向摆动速率第二次估算的半径R2来确定的,通常选用估算半径R1和R2的较小值。(https://www.xing528.com)
在进行追尾危险程度的判定时,系统会根据路面干湿情况,后车车速及相对车速计算出临界车距。计算出的临界车距就可以与实测的车距进行比较,当实测车距接近临界车距时,报警触发信号就会产生;当计算出的临界车距等于或大于实测车距时,便产生紧急制动信号。
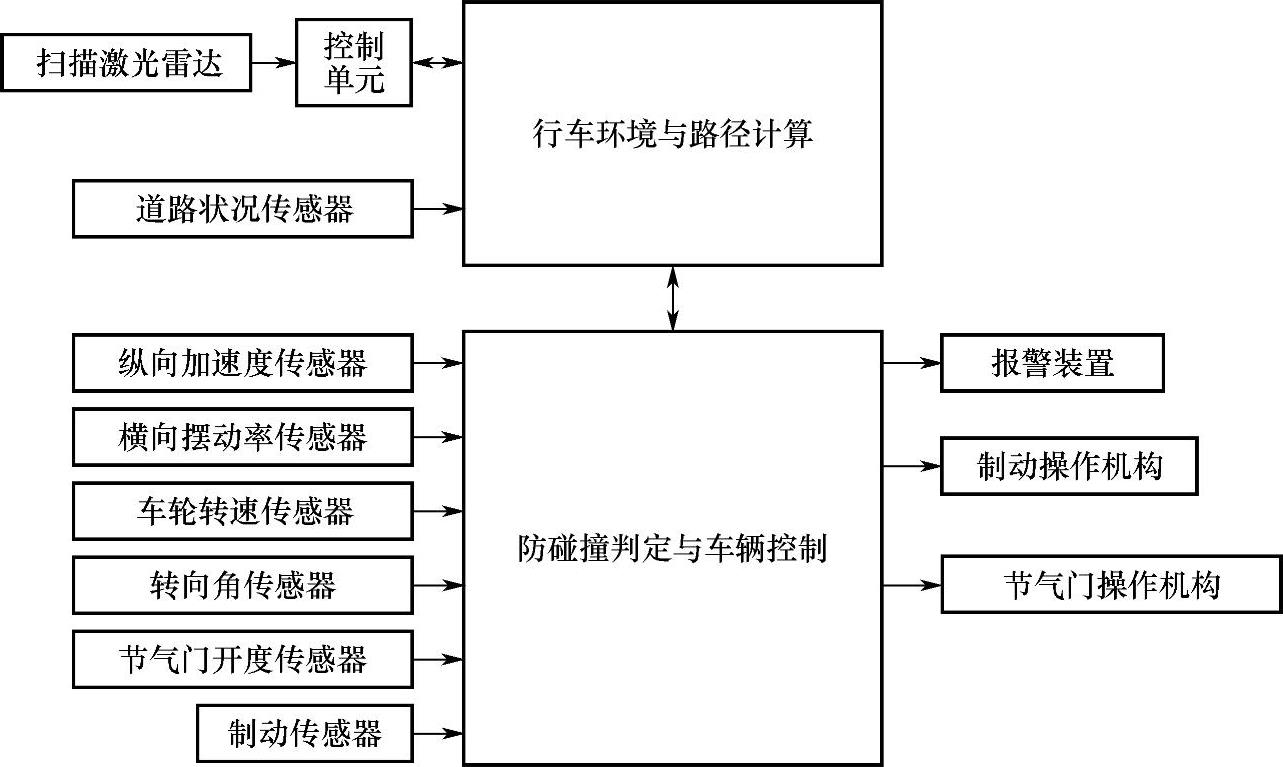
图6-5 激光雷达防碰撞系统的工作流程
3.电磁波测距
汽车电磁波测距防撞系统利用电磁波发射后遇到障碍物反射的回波,对其不断地检测,计算与前方或后方障碍目标的相对速度和距离。经分析判断,对构成危险的目标按程度不同进行报警,控制车辆自动减速,直到自动制动。
(1)电磁波测距防碰撞系统的组成及工作原理 汽车电磁波测距防撞系统主要由发射机、天线、收发开关、接收机、信号处理与微处理器、控制电路等组成,如图6-6所示。
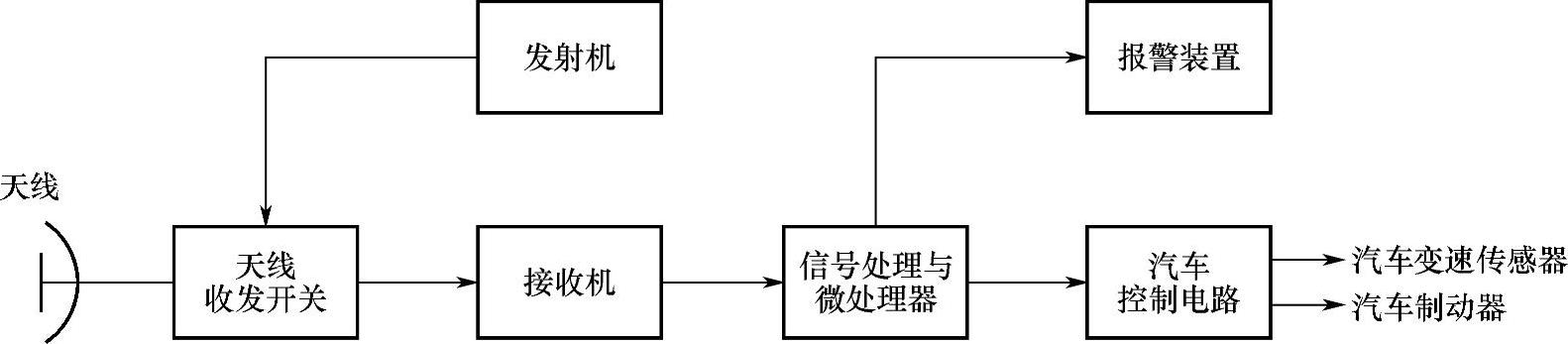
图6-6 汽车电磁波测距防碰撞系统的组成及工作原理
当发射机采用微波调频连续波调制时,在车辆行进中,雷达窄波束向前发射调频连续波信号,经天线向空间辐射电磁波(其传播速度就是光速)。当发射信号遇到目标时,信号被反射回来被同一天线接收,经混频放大处理后,可用其差频信号间的差值来表示雷达与目标的距离,把对应的脉冲信号经微处理器处理计算可得到距离数值,再根据差频信号差值与相对速度关系,计算出目标对雷达的相对速度。微处理器将上述两个物理量代入危险时间函数数学模型后,即可算出危险时间。当危险程度达到各种不同级别时,就会分别输出报警信号或通过车辆控制电路去控制车速或制动。
(2)汽车电磁波测距系统的功能
1)测速测距。
2)对前方100m内危险目标提供声光报警。
3)兼备汽车黑匣子功能。
4)自动巡航系统(行驶过程中自动保持与前面行驶车辆之间的距离)。
5)紧急情况下启动制动系统。
装有防碰撞雷达的汽车上了高速公路以后,驾驶人就可以启动车上的防碰撞雷达系统。雷达选定好跟随的汽车以后,被跟随的汽车就成了后面汽车的“目标车”。无论它是加速、减速,还是停车、起动,后面的汽车都能在瞬间之内予以模仿。如果前面的汽车在行驶一段时间之后,不再适合于作为自己的“目标车”,驾驶人可以重新选择另一辆“目标车”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。