



1.座椅位置传感器
要实现座椅位置的记忆与恢复,必须有座椅位置传感器。它主要有两种形式,一种是滑动电位器式,如图5-24所示;另一种是霍尔式,如图5-25所示。滑动电位器式位置传感器主要由座椅电动机驱动的齿轮、电阻丝以及在其上滑动的滑块组成。它的工作原理是,当电动机驱动座椅的同时,也驱动齿轮2带动螺杆,驱动滑块1在电阻丝3上滑动,从而将座椅位置信号转变成电压信号输入给ECU。
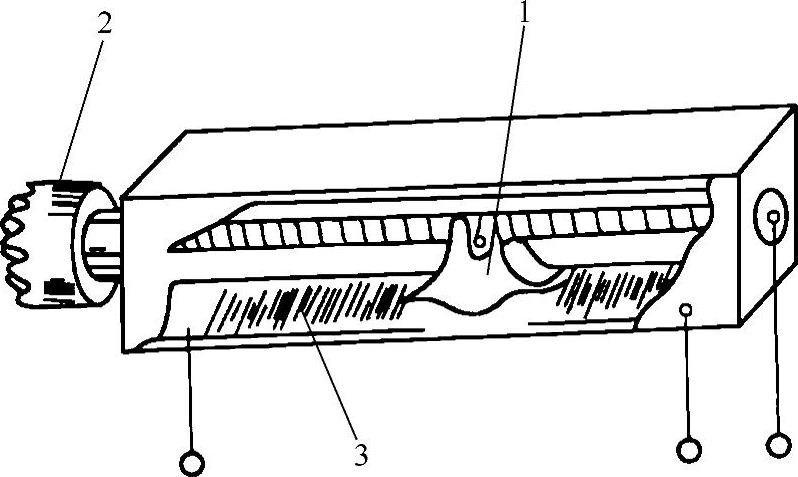
图5-24 滑动电位器式自动座椅位置传感器的结构图
1—滑块 2—齿轮(电动机驱动) 3—电阻丝
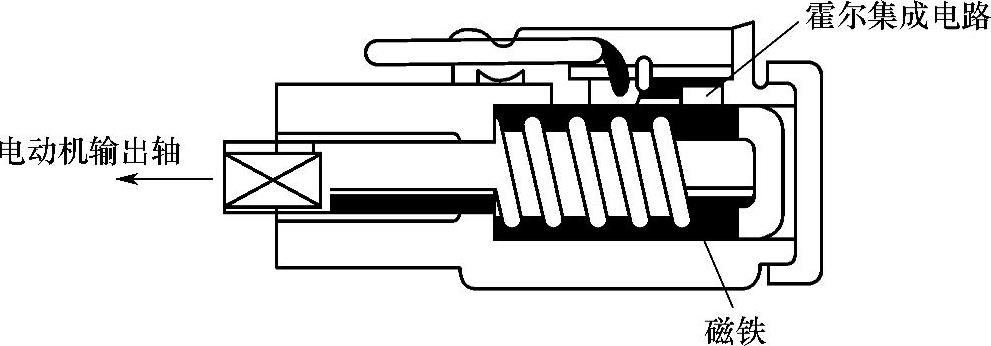
图5-25 霍尔式自动座椅位置传感器的结构图(https://www.xing528.com)
霍尔式位置传感器主要由永久磁铁、霍尔集成电路等组成。永久磁铁安装在由电动机驱动的转轴上,由于转轴的旋转而引起通过霍尔元件磁通量的变化,从而霍尔元件产生霍尔电压,再经霍尔集成电路进行放大并处理,然后取出旋转的脉冲信号输入ECU。
2.自动座椅位置记忆与复位的简单工作原理
图5-26所示为自动座椅位置的记忆与复位控制流程图。如果座椅滑板的滑动量约为240mm,位置传感器的霍尔集成电路对应于约0.6mm滑动量时,输出1个脉冲。利用存储与复位开关进行存储操作,若座椅位置调整好后,按下此开关,ECU内存的脉冲计数器便调置为零,以此存储座椅状态,并作为座椅和传感器位置信号计数的基准,即座椅位置在此前,脉冲数大于0,在此后,脉冲数小于0。随后若未采用复位功能自动调节,而是从手动开关输入,电动机正转或反转,座椅在此基准位置上向前或向后移动,ECU对位置传感器输出的脉冲进行计数。对于输出脉冲,当给电动机提供正转信号时脉冲加法计数,座椅前移,而反转时脉冲做减法计数,座椅后移。这样,就可以获知当前传感器滑动的位置和调置时座椅的相对位置,但只要不按下存储与复位开关,ECU便将此位置脉冲数进行存储(若按下,调置为零。若下次仍是手动开关输入,ECU便将内存的脉冲数进行加减计数运算,随后存储一个新的脉冲数作为当前内存)。
利用存储器与复位开关进行重复操作时,若ECU内存的脉冲数大于0,则当前位置位于存储位置的前侧,所以电动机反转,座椅向后方移动,这一动作一直持续到ECU计数脉冲数为零时,即一直到达存储位置为止;若ECU内存的脉冲数小于0,则座椅向前侧移动,直到ECU计数脉冲数为零,到达存储位置为止。
位置传感器采用电位计方式时,输出模拟电压,利用模/数转换器,进行数据变换处理。利用电位计可以检测实际移动的位置,所以,该计数器的比较电路与前述不同,但其控制流程相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。