



1.系统工作情况
当脱离25~220km/h的车速范围或在车速低于30km/h时按下“SET”按键,在识别目标时会出现问题,即目标“太弱”。比如前方车辆是摩托车,或者是在比较广阔的平原且目标区内静止的物体又较少,其工作分为两种情况。
1)在开阔的公路上行驶时(前边无车),如果外界气温在-5~+5℃或刮水器已经接通时出现目标识别故障,该系统立即关闭。
2)在正常行驶时(前边有车),第一个预警报不会导致系统马上切断,10s后主动巡航控制系统关闭,随后会出现带有惊叹号的故障显示。并不是只要出现目标识别不充分,就会显示故障和关闭系统。只要导致系统关闭的原因不再存在,就可以通过RESUME或SET来重新激活主动巡航控制系统。但如果出现严重故障的话,就无法激活系统。
2.系统工作原理
主动巡航控制系统的工作原理见表2-8。主动巡航控制系统的工作状态如图2-51所示,主动巡航控制系统的通信过程如图2-52所示,CAN总线信息的交换内容如图2-53所示。
表2-8 主动巡航控制系统的工作原理

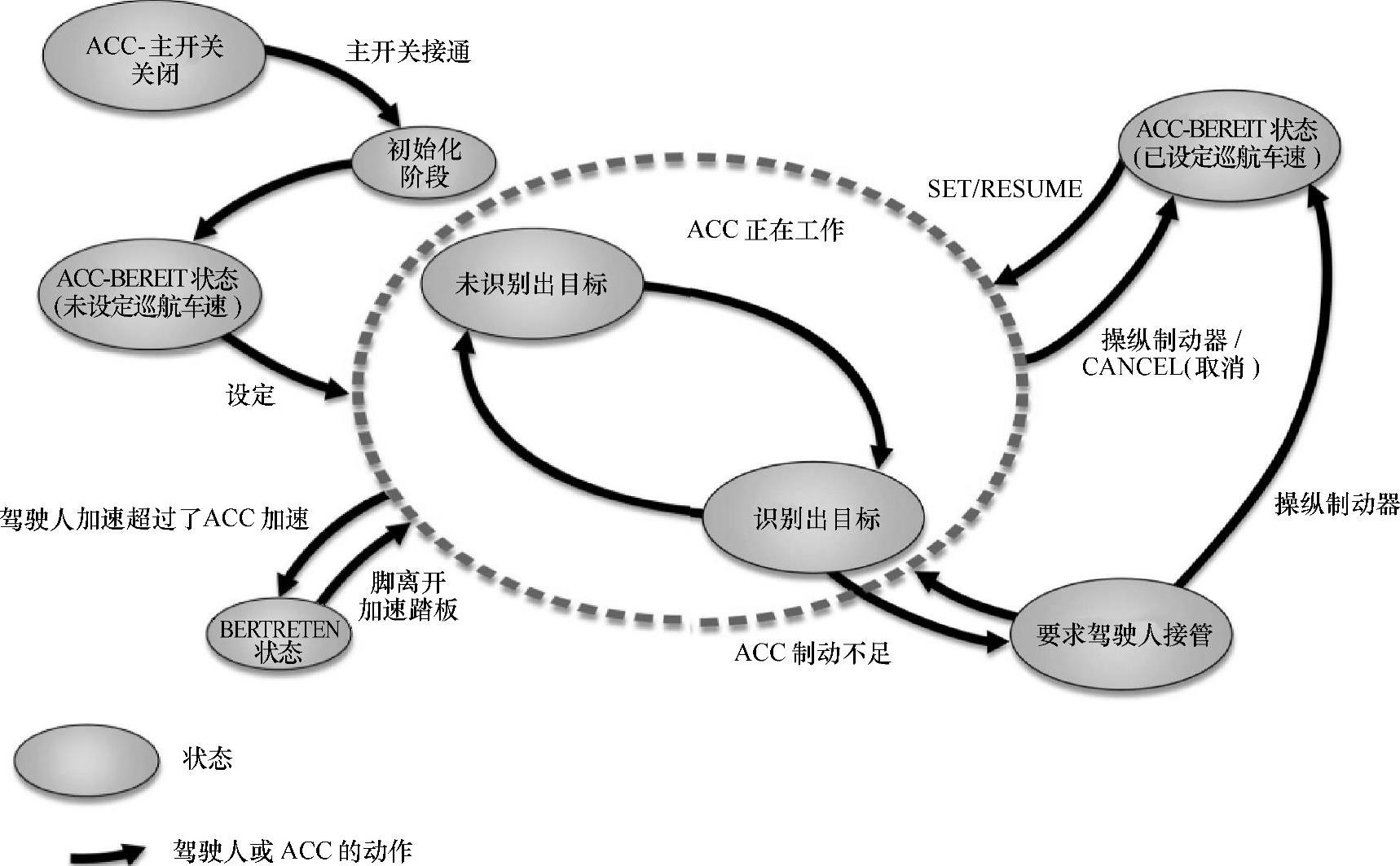
图2-51 主动巡航控制系统的工作状态
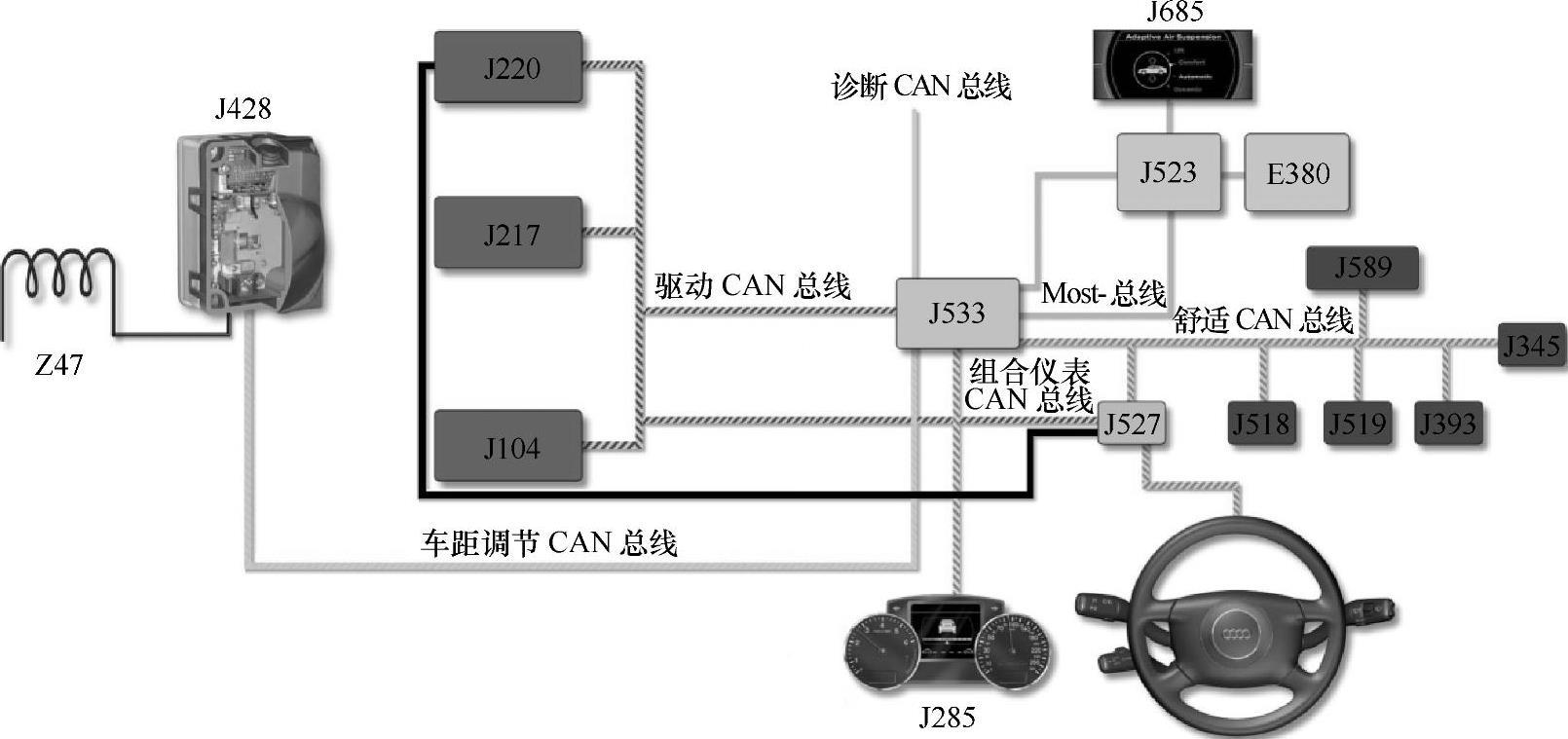
图2-52 主动巡航控制系统的通信过程图
J428—车距调节控制单元 J220—多点喷射控制单元 J217—自动变速器控制单元 J104—ESP控制单元 J533—数据总线诊断接口(网关) J285—组合仪表内带显示屏的控制单元 J527—转向柱电气控制单元/转向角传感器G85 J523—信息显示和操纵控制单元 Z47—车距调节传感器加热元件 E380—多媒体操纵单元 J685—前部信息显示单元 J589—驾驶人识别控制单元 J518—使用和起动授权控制单元 J519—供电控制单元 J393—舒适系统中央控制单元 J345—挂车识别控制单元(https://www.xing528.com)
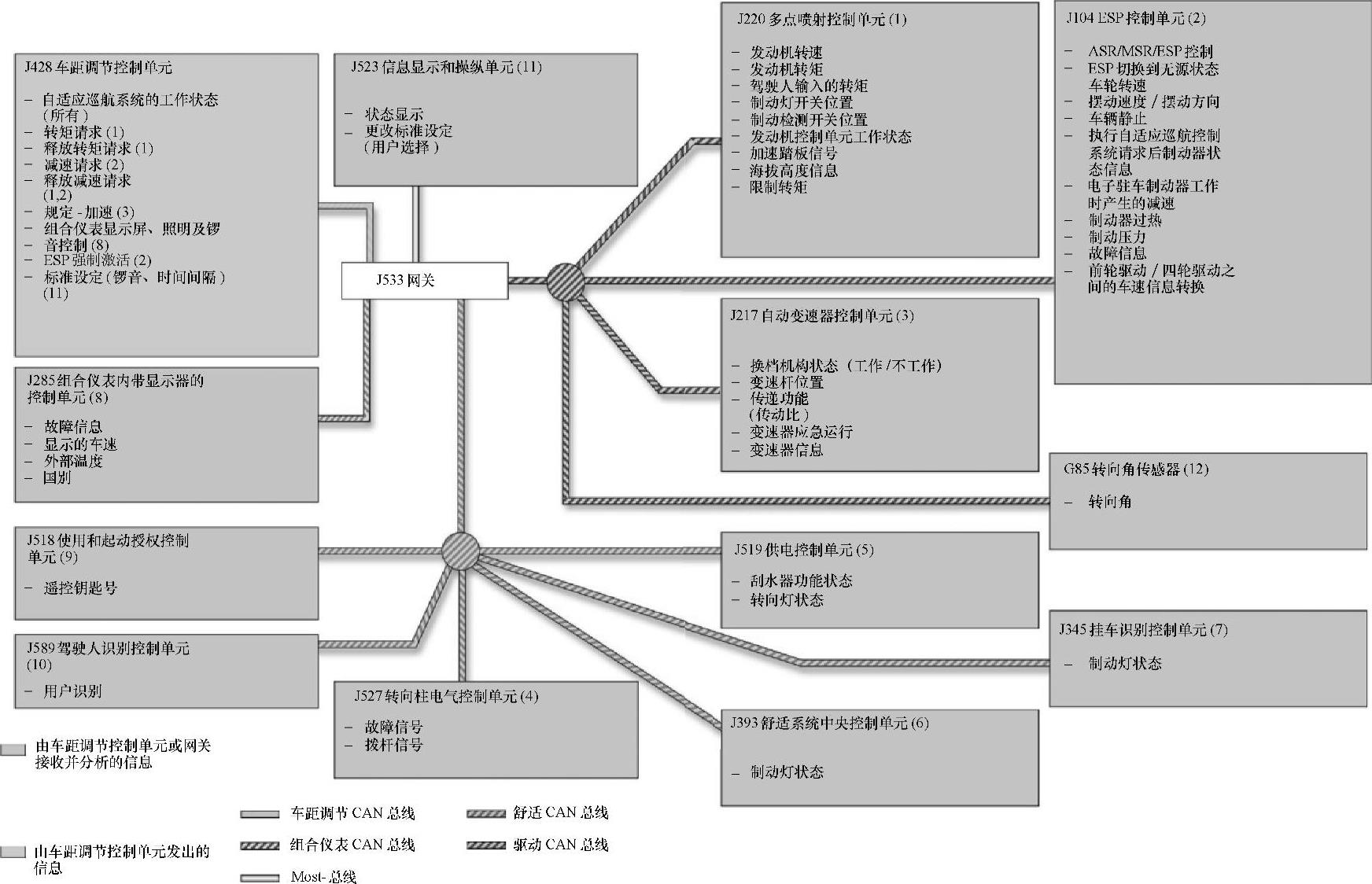
图2-53 主动巡航系统CAN总线信息交换通信内容
车距调节控制单元信息后括号内的数字表示由哪个控制单元处理相应的信息。例如,“转矩请求”信息就是由控制单元No.1-J220来处理的。车距调节控制单元与传感器之间的电路连接如图2-54所示。
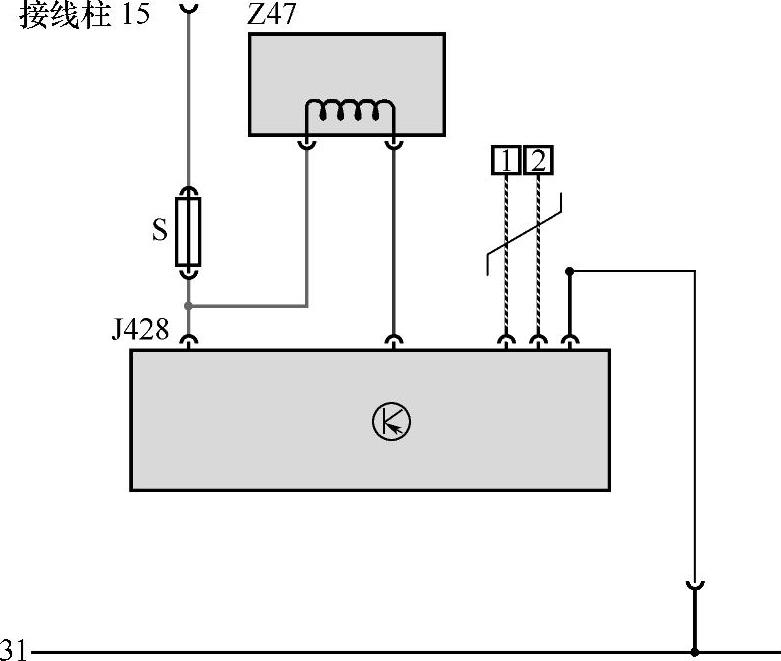
图2-54 车距调节控制单元与传感器之间的电路连接图
J428—车距调节控制单元 Z47—车距调节传感器加热器 S—熔丝 ①—驱动CAN总线Low ②—驱动CAN总线High
 —正极
—正极  —搭铁
—搭铁  —输出信号(加热控制)
—输出信号(加热控制)  —驱动CAN总线
—驱动CAN总线
3.系统的调整与诊断
如图2-55所示,雷达信号测出与前车的车距为130m,如果传感器在水平方向上偏离正确位置1°,在130m处就会产生2.1m的偏差。因而在极端情况下,该车就可能按照相邻车道上的一辆车来调节车距。
当传感器或传感器支架损坏需要更换时,必须对传感器进行机械调节。这个调节需要在车轮定位仪器上来完成。主动巡航控制系统的所有元件始终都处在被监控中,出现的故障会被存入故障存储器内。用VAS 5051可读出存储的故障码并进行故障导航查询。
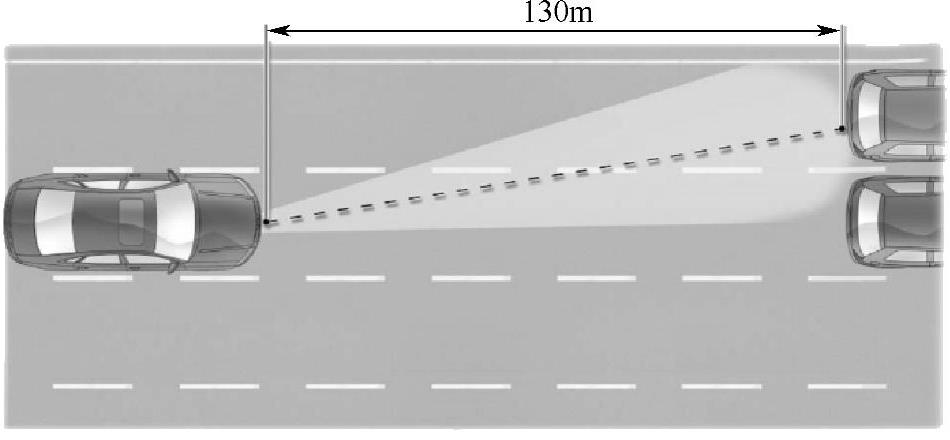
图2-55 行车示例图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。