



1.系统简介
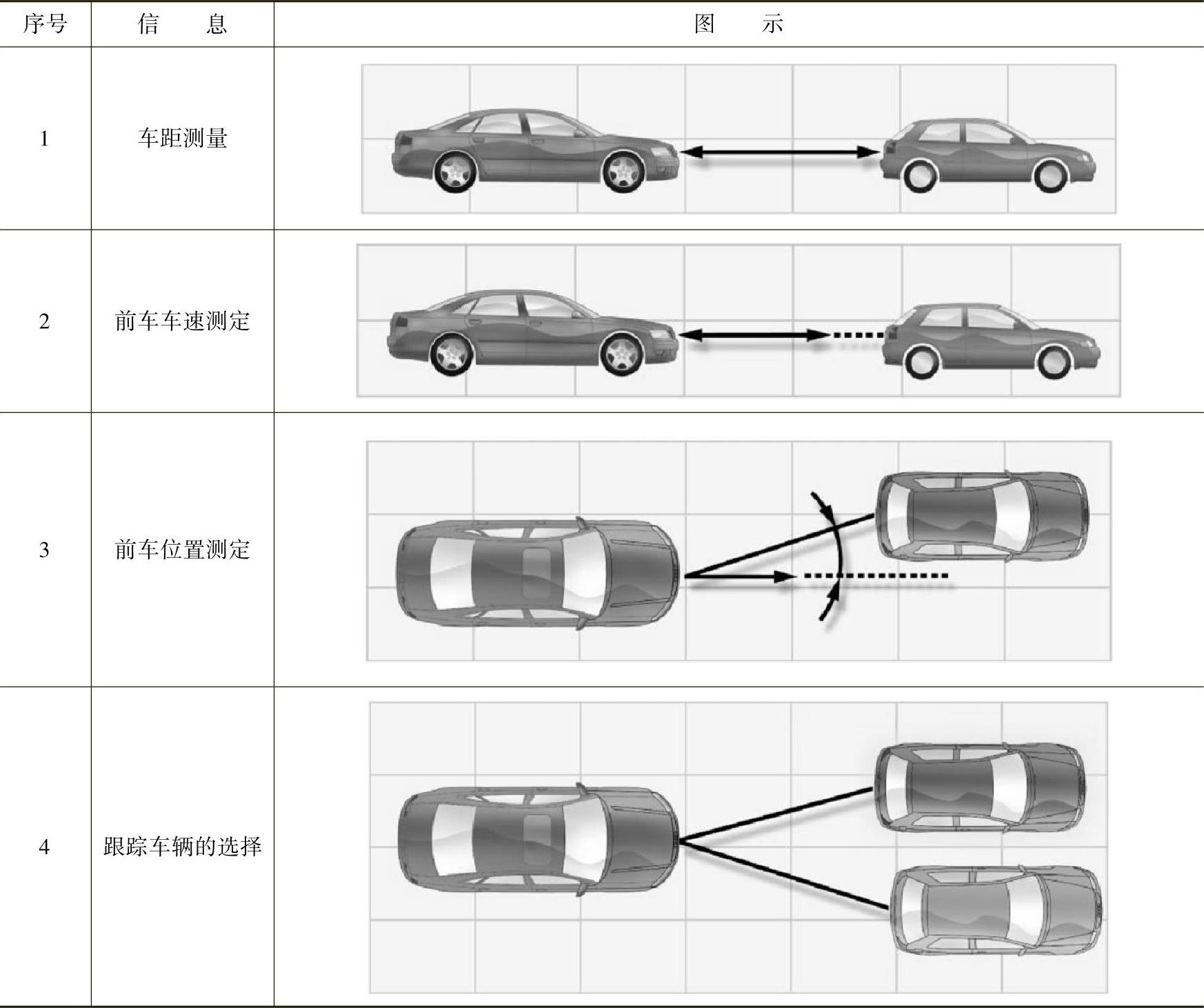
主动巡航系统的主要功能在于它不但跟传统定速巡航系统一样保证了驾驶人可选定某一车速匀速行驶,更重要的是它能保持与前方车辆的车距,也就是说,它是车速与车距的结合控制。系统硬件上最大的改动是通过安装在前保险杠下方的雷达探测器来探知本车与前车的车速及车距。
如果两车距离大于设定的距离,车辆就会加速到驾驶人事先设定的车速;当两车距离小于设定的车距时,车辆就会通过发动机降低功率,传动系统切换档位,甚至在必要时启用制动系统来减缓车速以保证设定的车距。此系统进一步提高了驾驶的舒适性,消除了驾驶疲劳,且益于提高行车安全性。ACC系统主要适用于高速公路、低交通密度和宽路面道路远程驾驶的情况,在交通拥堵和城市中使用ACC系统暂时还无法做到,这需要进一步开发昂贵的传感器功能器件。
2.主动巡航控制(ACC)系统的局限性
主动巡航控制系统是一个驾驶人辅助系统,绝不可以将其看成安全系统,它也不是全自动驾驶系统。该系统的局限性表现在:
1)主动巡航控制系统在车速为30~200km/h时才工作。
2)主动巡航控制系统对固定不动的目标无法做出反应。
3)雨水、浮沫以及雪泥水会影响雷达探测器的工作效果。在转弯半径很小时,由于雷达视野受到限制,所以会影响系统的功能。
4)主动巡航控制系统工作时应满足的前提条件见表2-7。
表2-7 主动巡航控制系统工作时应满足的前提条件
3.系统部件结构(https://www.xing528.com)
(1)系统部件 系统部件的组成与位置如图2-30所示。
(2)车距调节传感器G259和车距调节控制单元J428
1)安装位置。传感器和控制单元安装在同一个壳体内,如果传感器/控制单元有故障,必须整体更换这个总成。通过支架上的转接板来进行安装和调整,该支架用螺栓拧在保险杠支架的中央位置,其位置与结构如图2-31所示。
2)结构。传感器和控制单元安装在同一个壳体内,如果传感器/控制单元有故障,必须整体更换总成。当前车的位置和车速以及当前的车距确定后,可以得出应如何来进行调节,调节数据被发送到多点喷射控制单元、自动变速器控制单元以及ESP控制单元上。这些数据是经过车距调节CAN总线和数据总线诊断接口(网关)传送到驱动CAN总线上的。
车距调节传感器G259发射出调频信号,然后接收反射回来的信号。车距调节控制单元J428处理这些雷达信号以及其他输入信号。从这些信号中就可确定,雷达探测器视野中出现的物体哪一个是相关的前车(既本车按其调节车距的那台车)。
(3)车距调节传感器护盖 保险杠装饰格栅内的车距调节传感器护盖是采用雷达信号可穿透的材料制成的。对车距调节传感器护盖表面所做的任何改动(如后喷的油漆、贴的不干胶标签及其他东西)都可能影响传感器的功能。这个护盖是可加热式的,这是为了防止雪、冰等妨碍正常的功能。
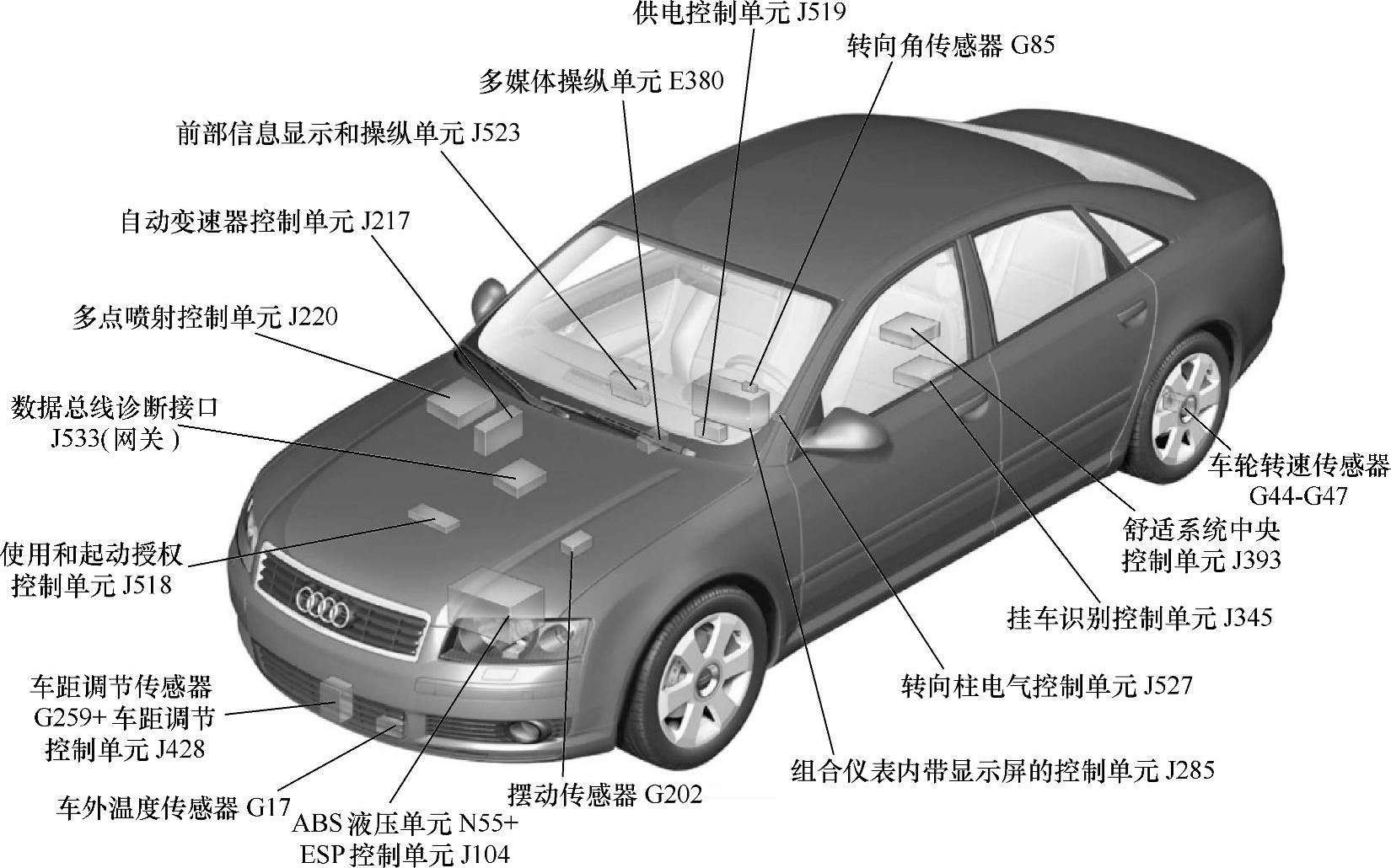
图2-30 系统部件的组成与位置图
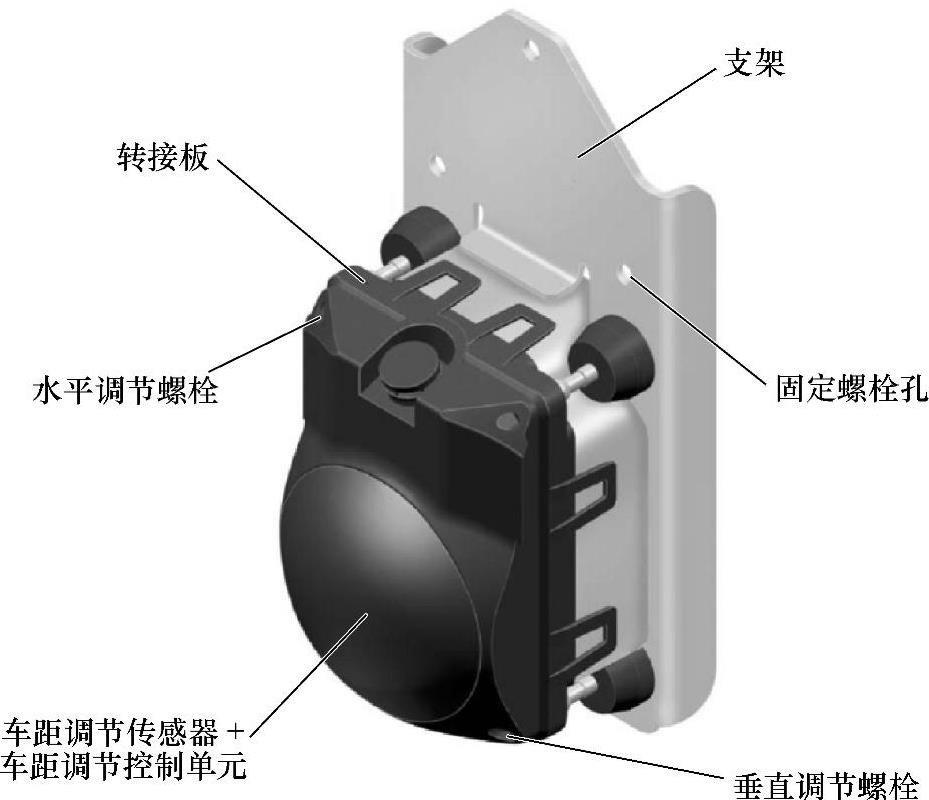
图2-31 车距调节传感器和车距调节控制单元的组成位置与结构图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。