



【摘要】:图2-2 汽车巡航控制系统的电路原理框图驾驶人操纵巡航控制开关,将车速设定、减速、恢复、加速、取消等命令输入计算机。图2-3 巡航控制系统的框图汽车巡航控制系统是一个闭环控制系统,而控制器件的主体是单片机及配属的模块;控制的基本方法是经典的比例积分调节控制方式。巡航控制系统的框图如图2-3所示。
汽车巡航控制系统的发展始于20世纪60年代,经历了机械控制系统、晶体管控制系统、模拟计算机控制系统和数字微型计算机控制系统4个阶段。自20世纪80年代初开始,数字微型计算机巡航控制系统得到广泛应用。数字微型计算机巡航控制系统的电路框图如图2-2所示。
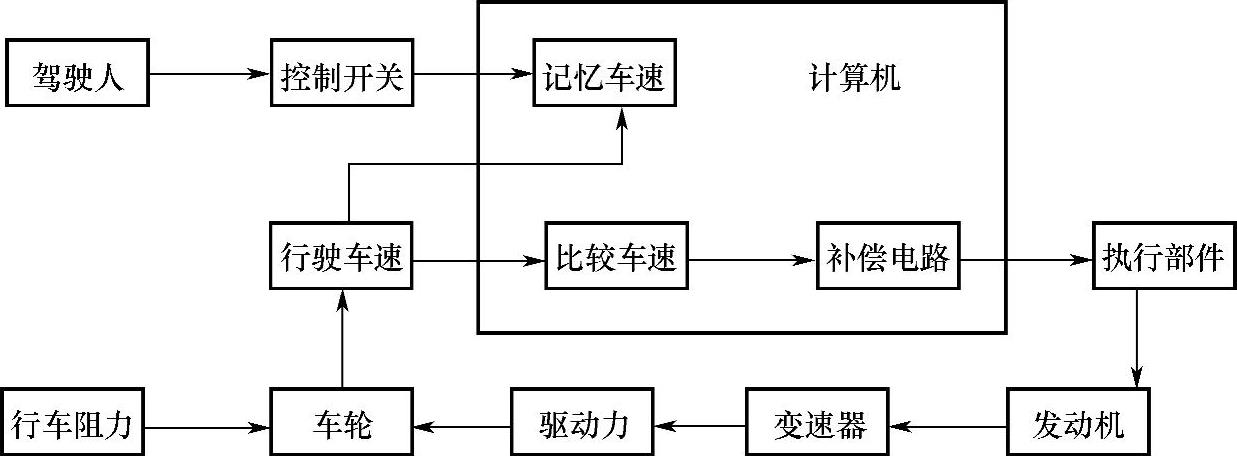
图2-2 汽车巡航控制系统的电路原理框图
驾驶人操纵巡航控制开关,将车速设定、减速、恢复、加速、取消等命令输入计算机。当驾驶人通过巡航控制开关输入设定命令时,计算机便记忆此时车速传感器输入计算机的车速,并按该车速对汽车进行等速行驶控制。汽车在巡航行驶过程中,不断通过比较电路将实际车速与设定车速进行比较,计算出实际车速与设定车速的差值,然后通过补偿电路输出对执行部件的命令,执行部件控制发动机节气门开度加大或减小,使实际车速接近设定车速。(https://www.xing528.com)
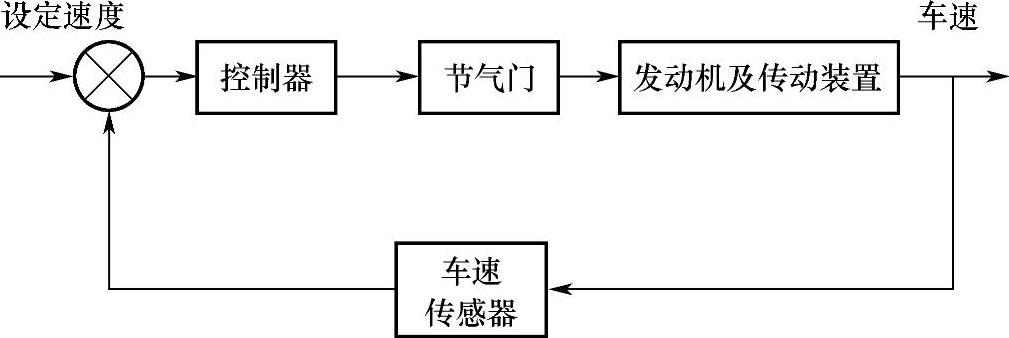
图2-3 巡航控制系统的框图
汽车巡航控制系统是一个闭环控制系统,而控制器件的主体是单片机及配属的模块;控制的基本方法是经典的比例积分(Proportion and Integral calculus)调节控制(又称PI调节控制)方式。巡航控制系统的框图如图2-3所示。这个闭环控制系统,在理论及实践上均可实现调节控制误差为零,即实际车速与设定车速之间的误差为零。但具体运行上并不需要误差为零,因为误差为零时,行驶阻力的微小变化都将引起节气门开度的变化,容易产生游车(瞬时车速不断地变化,而平均车速不变),即调节控制的振荡,这是我们不需要的。因而控制系统的误差应是一个大于零的实数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。