



(1)别克荣御轿车的ABS-TCS/ESP系统
1)别克荣御轿车的ABS-TCS/ESP系统的组成。别克荣御轿车的ABS-TCS/ESP系统主要部件位置分布如图2-77所示。
为了能独立控制各车轮的制动回路,本系统采用了前/后分离的4通道回路结构。每个车轮制动回路的液压都是隔离的,这样当某个制动回路出现泄漏时仍能继续制动。液压调节器的液压回路如图2-78所示。液压调节器总成包括以下部件:
两个回程泵2:在ABS-TCS/ESP减压阶段,两个泵从储能器3和制动轮缸4抽取过量的制动液,然后通过液压调节器将制动液返回到制动总泵5,以减小制动液压力C。另外,回程泵还在自动制动差速器(ABD)制动干预阶段向制动轮缸施加制动液压力。
一个电动机M:电动机驱动回程泵。
两个储能器3:储能器在ABS-TCS/ESP减压阶段储存过量的制动液,从而使液压调节器能够即时减小制动液压力。
四个进口阀6:当进口阀处于常态位置时,各进口阀使制动液压力施加到制动轮缸上。当阀动作时,各进口阀将制动轮缸与制动总泵隔离开来。
四个出口阀7:在常态位置时,各出口阀将制动轮缸与储能器及回程泵隔离开来。当阀动作时,各出口阀将过量的制动液直接引至储能器和回程泵,从而使压力减小。
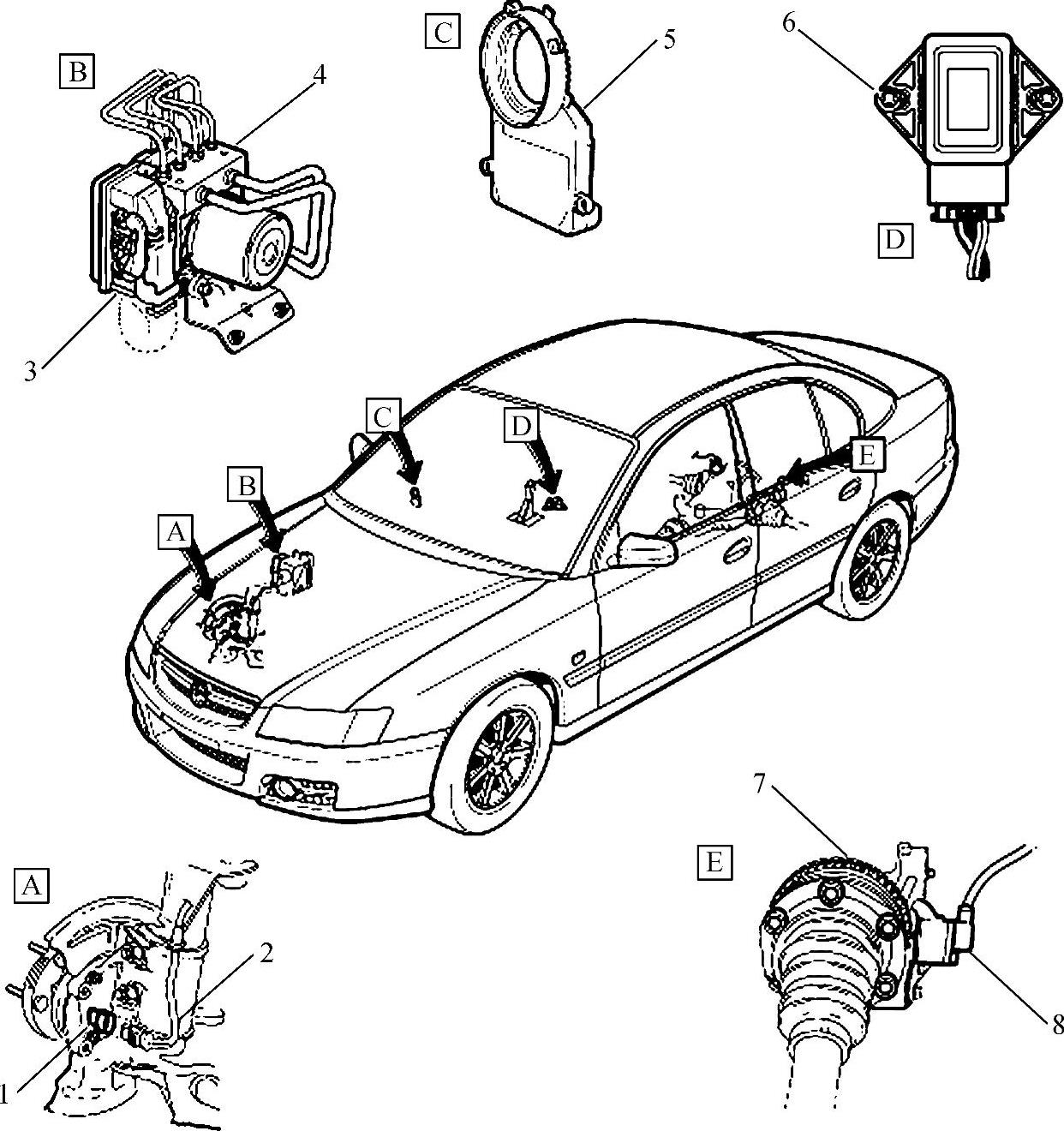
图2-77 别克荣御轿车的ABS-TCS/ESP系统主要部件位置分布
1-前轮转速传感器 2-前轮转速传感器引线 3-电子控制单元(ECU) 4-液压调节器总成5-转向盘转角传感器 6-横向偏摆率传感器 7-后轮转速传感器脉冲环 8-后轮转速传感器
两个隔离电磁阀8:隔离电磁阀将后制动回路与制动总泵隔离开来,从而防止了制动液在牵引力控制系统工作期间回流至制动总泵。
两个起动电磁阀9:用于在牵引力控制系统工作期间使制动液从制动总泵流至液压泵中。
2)别克荣御轿车的ABS-TCS/ESP系统的工作原理
①常规制动(非ABS制动)。在常规制动时,液压调节器中的所有电磁阀都处于常态位置,这使得制动液畅通无阻地从制动总泵流至制动轮缸。液压调节器使制动液能从总泵流至制动轮缸或从制动轮缸流至总泵,从而实现了非ABS常规制动,如图2-79所示。
②防抱死制动(ABS制动)。假设左后车轮开始抱死。如图2-80所示,电子控制单元监测并比较每个车轮速度传感器的信号以确定车轮是否滑移。如果在制动过程中检测到车轮滑移,电子控制单元将切换到保压阶段,并向液压调节器1发送一个控制信号,以关闭左后进口阀2。
当左后进口阀和出口阀3都关闭时,无论制动踏板D所施加的制动液压力A为多大,左后制动回路都将被隔离,从而使左后轮制动液压力保持恒定压力B。
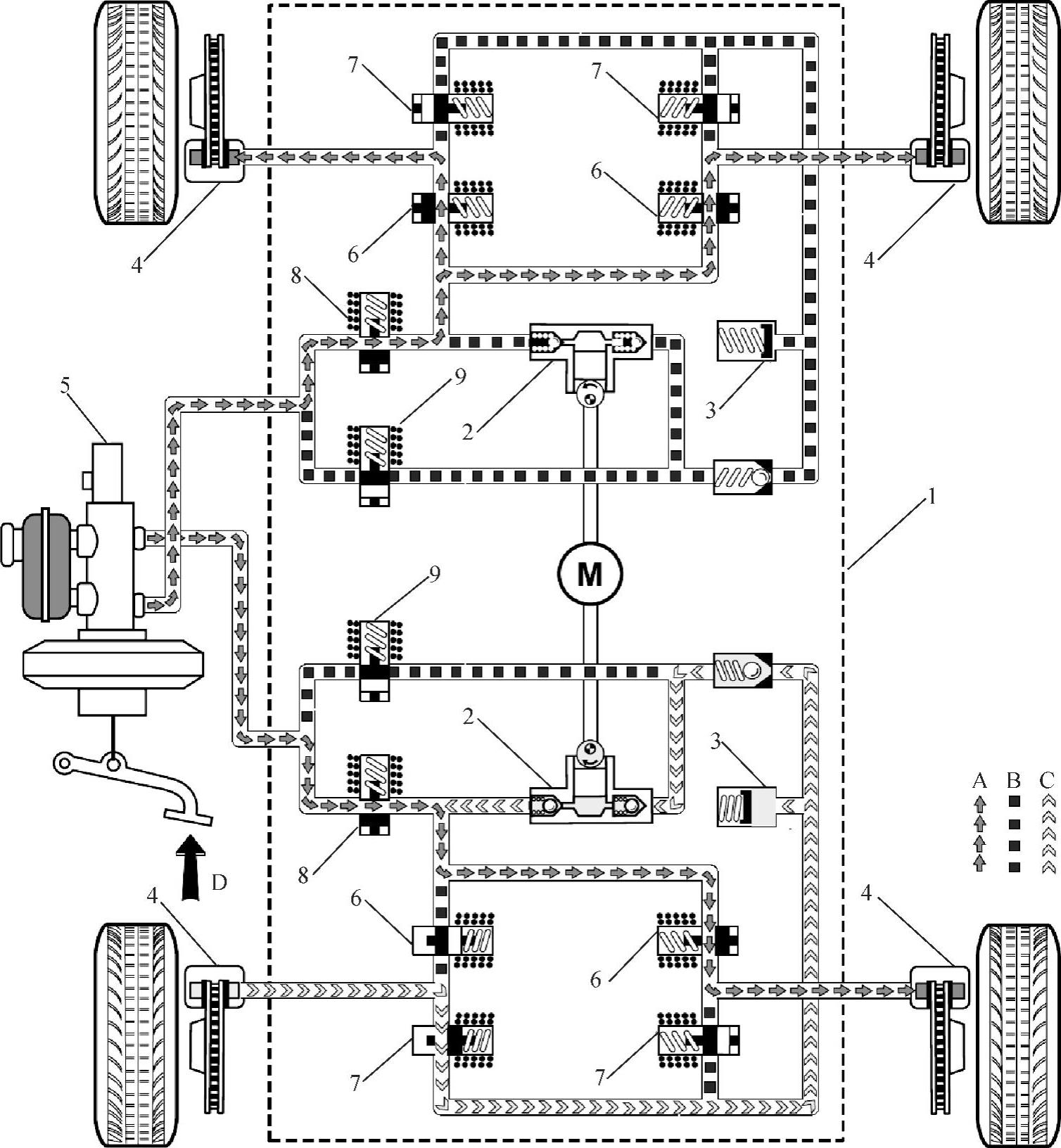
图2-78 液压调节器的液压回路
1—液压调节器总成 2—回程泵 3—储能器 4—制动轮缸 5—制动总泵 6—进口阀 7—出口阀 8—隔离电磁阀 9—起动电磁阀 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合) C—泵产生的制动液压力流 D—制动踏板踩下 M—电动机
假设在防抱死制动系统处于保压阶段时左后车轮仍处于抱死状态。如图2-81所示,电子控制单元监测并比较每个车轮速度传感器的信号以确定车轮是否滑移。如果当防抱死制动系统处于保压阶段时仍然检测到左后车轮处于滑移状态,则电子控制单元将切换到ABS减压阶段。电子控制单元向液压调节器1发送控制信号以:
关闭左后进口阀2并打开左后出口阀3。运行液压调节器泵4。在ABS阶段,液压调节器泵将一直保持可工作状态。
在减压阶段,这将产生下列操作:
a.当左后出口阀打开时,左后轮制动液先被导入储能器5,以保证制动液压力立即下降。
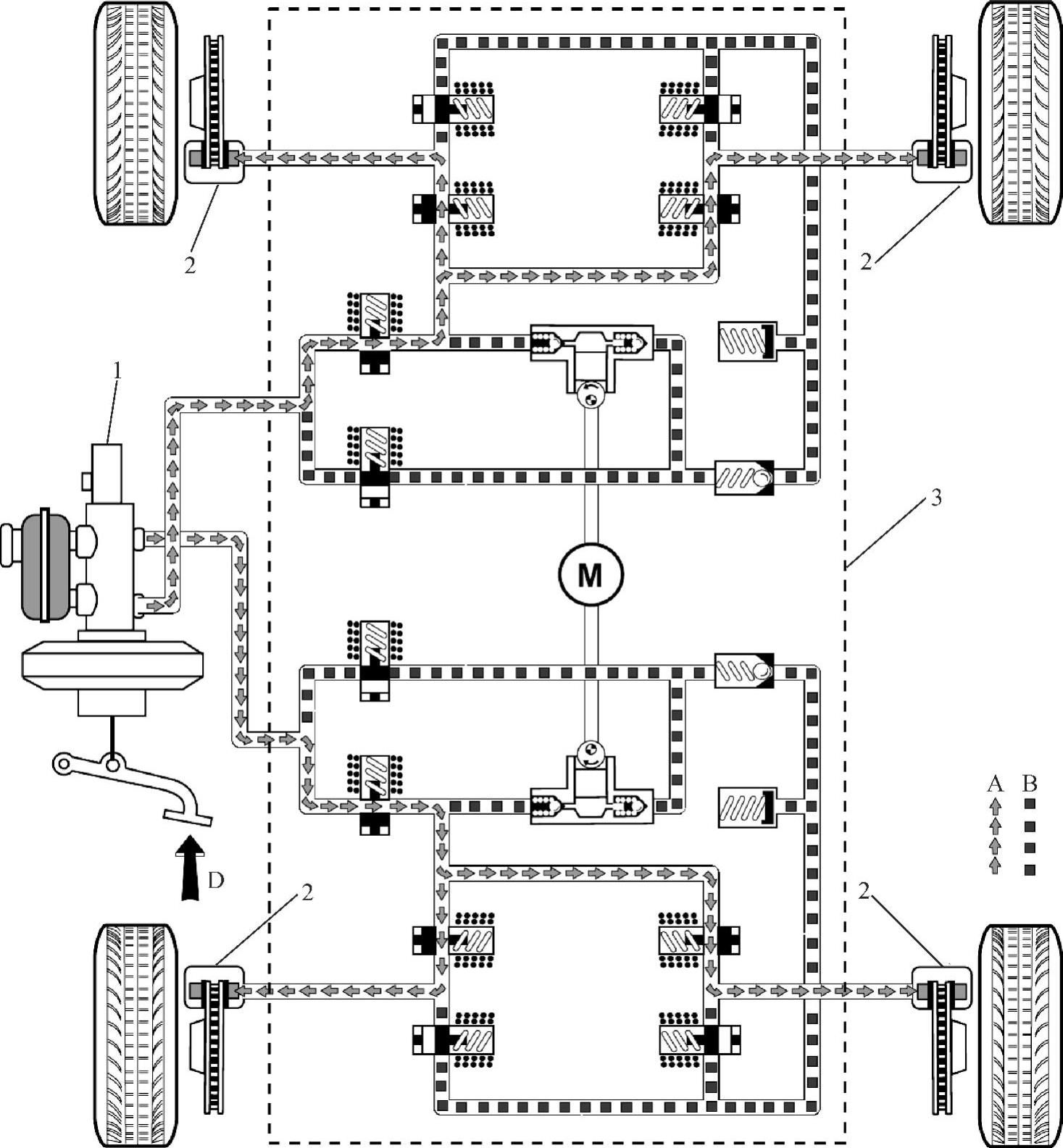
图2-79 常规制动液压力回路
1—制动总泵 2—制动轮缸 3—液压调节器总成 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合 )D—制动踏板踩下
b.储能器储存过量的左后轮制动液。
c.液压调节器泵积累左后轮制动液回流压力,从而使左后轮制动轮缸6释放出来的制动液能够返回到制动总泵7,抵消制动踏板压力D。在这个阶段中,由于制动踏板仍处于踩下状态,所以从制动轮缸释放出来的压力必须大于制动总泵施加的压力。
假设在ABS减压阶段施加的制动力减小,从而导致左后轮制动不足。如图2-82所示,电子控制单元监测并比较每个车轮转速传感器的信号以确定车轮是否滑移。如果电子控制单元检测到由于ABS减压阶段所施加的制动力减小而导致左后轮速度大于其他三个车轮的速度,则电子控制单元将切换到增压阶段。电子控制单元向液压调节器1发送控制信号以:
关闭左后出口阀2并打开左后进口阀3。
在ABS阶段继续运行液压调节器泵4。
总泵5的制动液A像常规制动操作那样被再次引入左后轮制动轮缸6。先前减小的制动液压力现在增加了,从而减小了左后轮的速度。
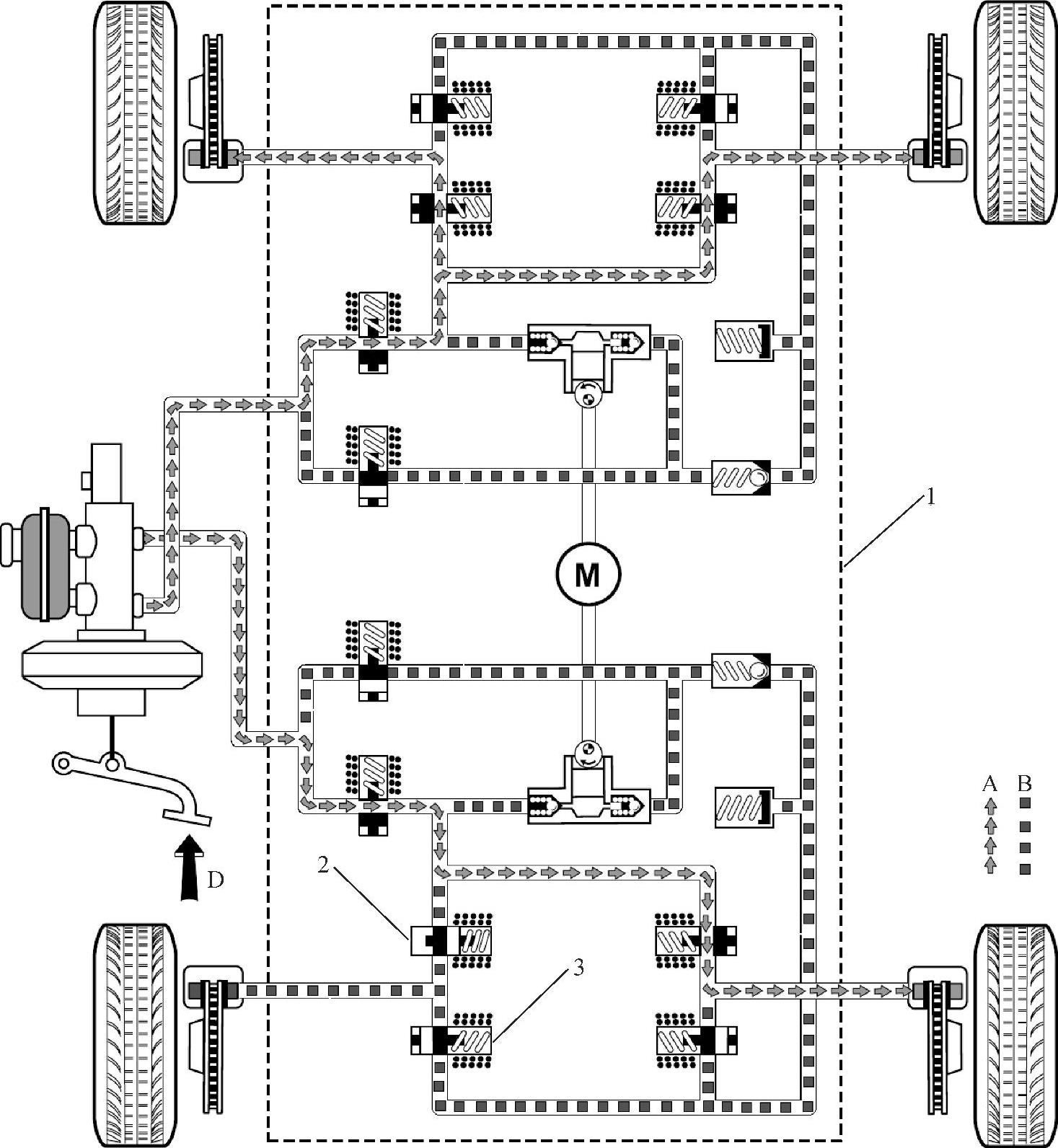
图2-80 ABS保压阶段液压回路
1—液压调节器 2—进口阀 3—出口阀 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合) D—制动踏板踩下
这些ABS阶段不断重复,直到电子控制单元检测到车轮速度达到平衡或者制动踏板压力消除为止。根据路面情况,每秒钟大约有4到6个控制循环。
③电子制动力分配系统(EBD)。电子制动力分配系统是ABS软件的组成部分,它被编程设置在电子控制单元(ECU)中。该系统用于在适度制动时替代后制动力比例阀,以减小后轮的滑移。电子制动力分配系统利用已有的防抱死制动系统主动控制功能来调节车辆后轮的制动液压力。这使得电子制动力分配系统能对各种车辆载荷、驾驶操作或路面状况提供动态的前后轮制动力比例。
在某些情况下,如果电子制动力分配系统启用,则当驾驶员来回踩动制动踏板,改变制动踏板压力时,制动踏板会下降约10mm。这是由于液压调节器对后轮制动液压力进行调整而造成的,属于正常现象。
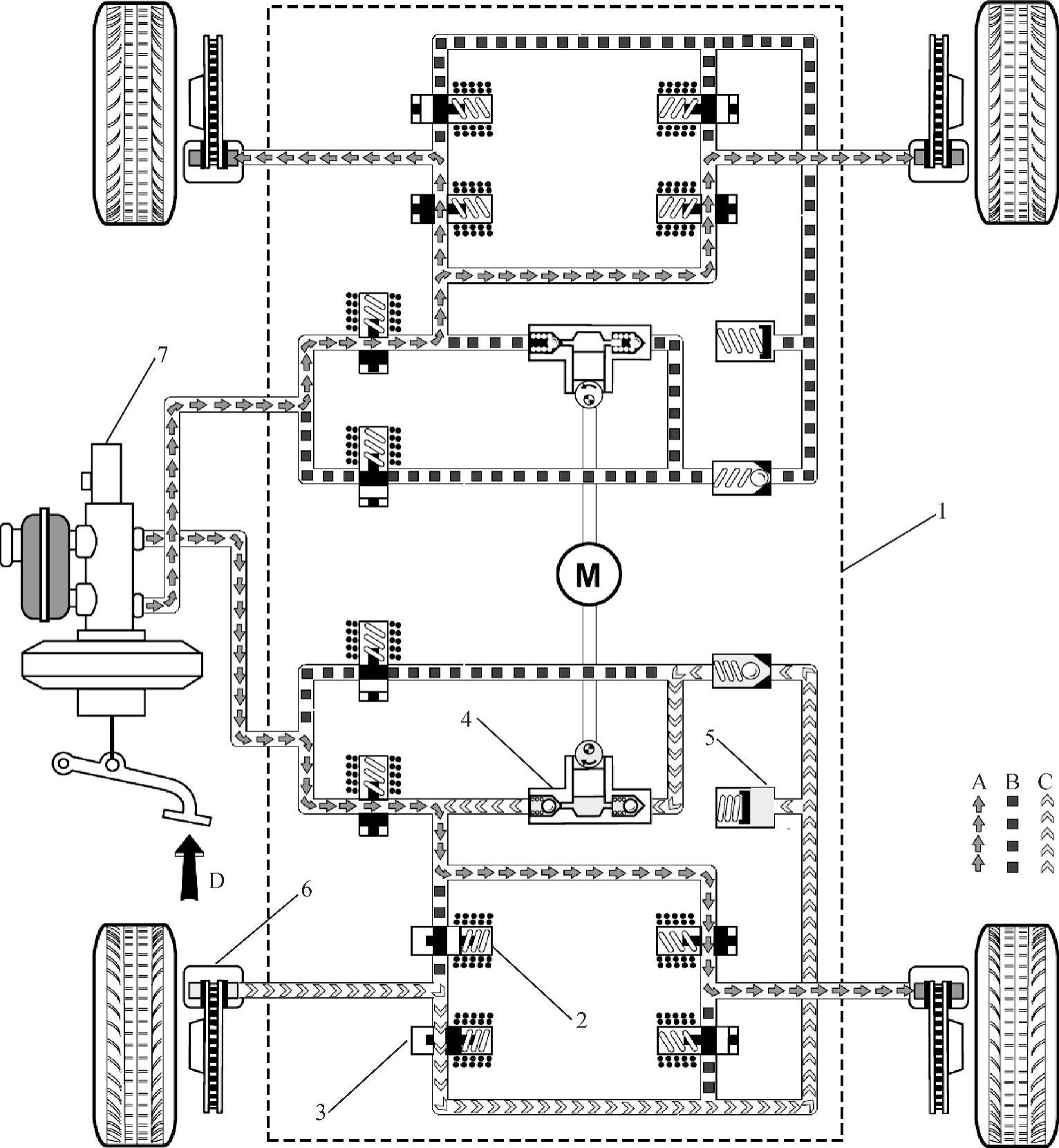
图2-81 ABS减压阶段液压回路
l-液压调节器总成 2-进口阀 3-出口阀 4-液压泵 5-储能器 6-制动轮缸 7-制动总泵 A-常规的制动液压力 B-停止的制动液压力流(电磁阀闭合) C-液压调节器泵产生的制动液压力流 D常规制动液压力与释放的制动液压力相组合
电子制动力分配系统保持活性功能:
在制动过程中,电子制动力分配系统对保持车辆稳定性具有很重要的作用。因此,电子制动力分配系统在其软件中加入了一个保持活性(Keep Alive)功能。当电子控制单元检测到防抱死制动系统有故障时,根据故障类型,系统的某些部分仍然能起作用。这样,即使防抱死制动系统存在某些故障,电子制动力分配系统仍能对后轮实行一定程度的制动力比例分配。
当制动器接合A并且电子控制单元(ECU)检测到后轮达到比前轮减速更快的点时,液压调节器就会调节后轮制动液压力B以保持后轮制动力并防止车轮抱死。电子制动力分配系统在滑移率增加到需要实行ABS制动干预之前开始工作。
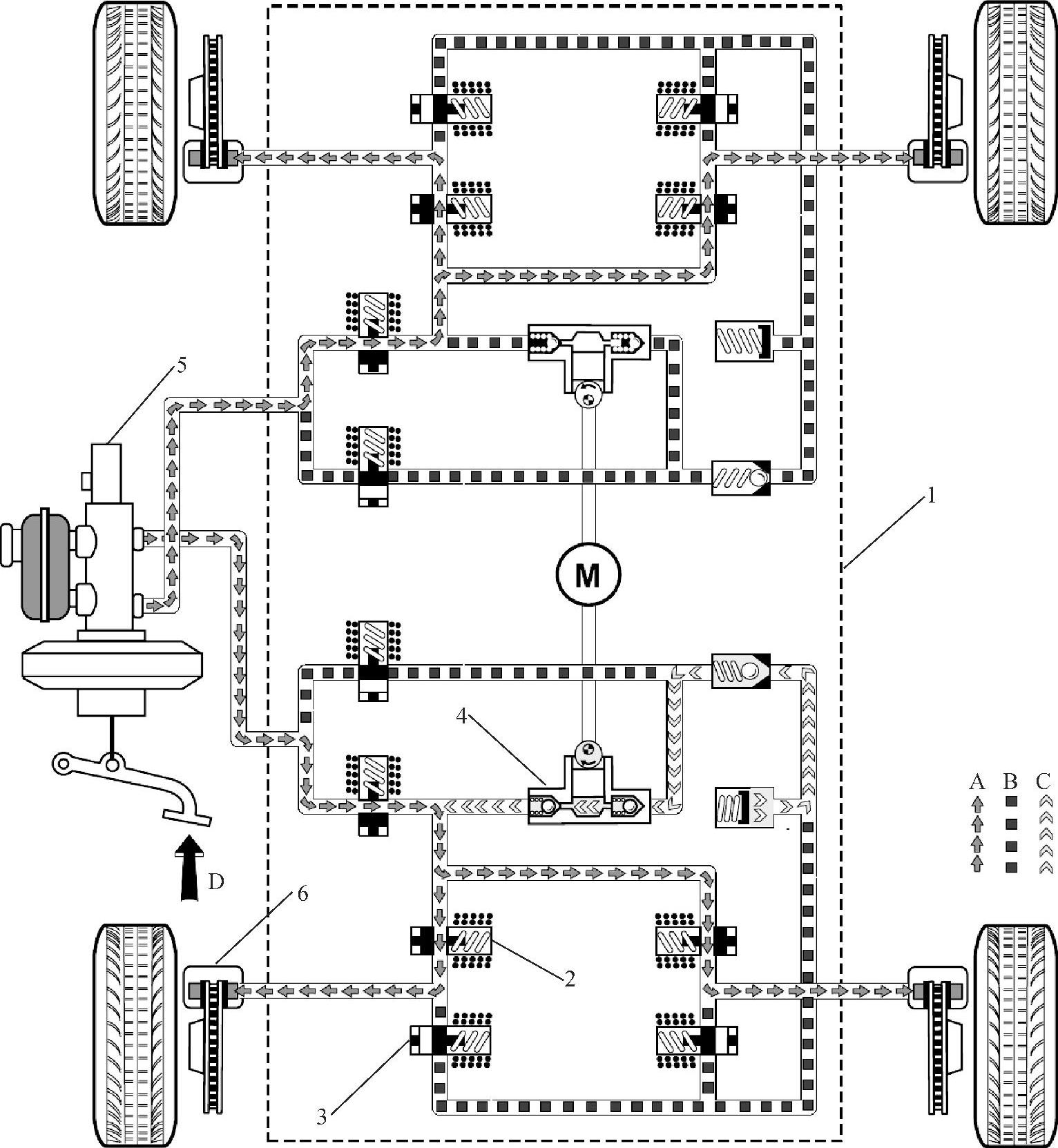
图2-82 ABS增压阶段液压回路
1—液压调节器总成 2—进口阀 3—出口阀 4—液压泵总成 5—制动总泵 6—制动轮缸 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合) C—液压调节器泵产生的制动液压力流 D—制动踏板踩下
假设后轮开始滑移。如图2-83所示,电子控制单元监测并判断每个车轮转速传感器的信号以确定车轮是否滑移。当电子控制单元确定后轮减速比前轮快,但减速度还没有达到需要ABS干预的临界点时,电子控制单元将切换到EBD保压阶段。
作为电子制动力分配系统保压阶段的第一步,电子控制单元将向液压调节器1发送一个控制信号,以关闭后进口阀2并将后轮制动回路与制动总泵隔离开来。这样,无论通过制动踏板D所施加的制动液压力A为多大,都保持了后轮制动液压力。
假设在系统已处于保压阶段时后轮减速仍然比前轮快。如图2-84所示,如果电子控制单元检测到在电子制动力分配系统已处于保压阶段时后轮减速仍然比前轮快,则电子控制单元将切换到减压阶段。电子控制单元向液压调节器1发送控制信号以:
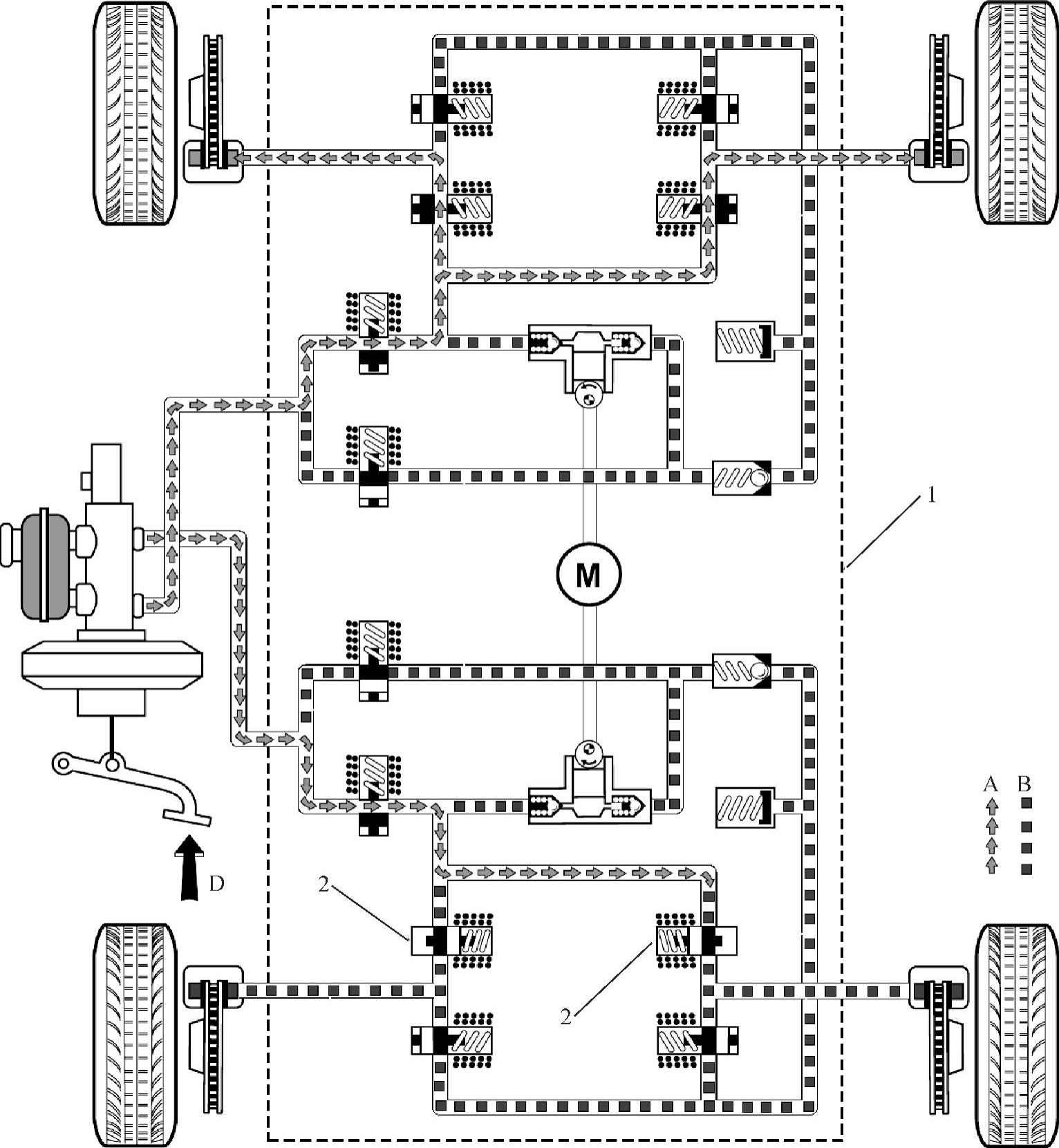
图2-83 EBD保压阶段液压回路
1—液压调节器总成 2—后进口阀 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合) D—制动踏板踩下
关闭后进口阀2并打开后出口阀3。
在减压阶段,这将产生下列操作:
a.后轮制动液直接进入储能器4以减小后轮制动液压力。
b.储能器储存过量的后轮制动液。储能器能够储存电子制动力分配系统工作过程中所有的过量制动液。但是,如果储能器容量已经达到极限,并且电子控制单元仍判定后轮减速比前轮快,则电子控制单元将运行液压调节器泵5,将过多的制动液返回到制动总泵6。
假设因EBD减压阶段减小了制动力,前后轮以相同或几乎相同的速度旋转。
电子控制单元监测并比较每个车轮转速传感器的信号以确定车轮是否滑移。如果电子控制单元检测到由于EBD减压阶段减小了制动力,前后轮此时以相同或几乎相同的速度旋转,则电子制动力分配系统将从减压阶段切换到增压阶段。
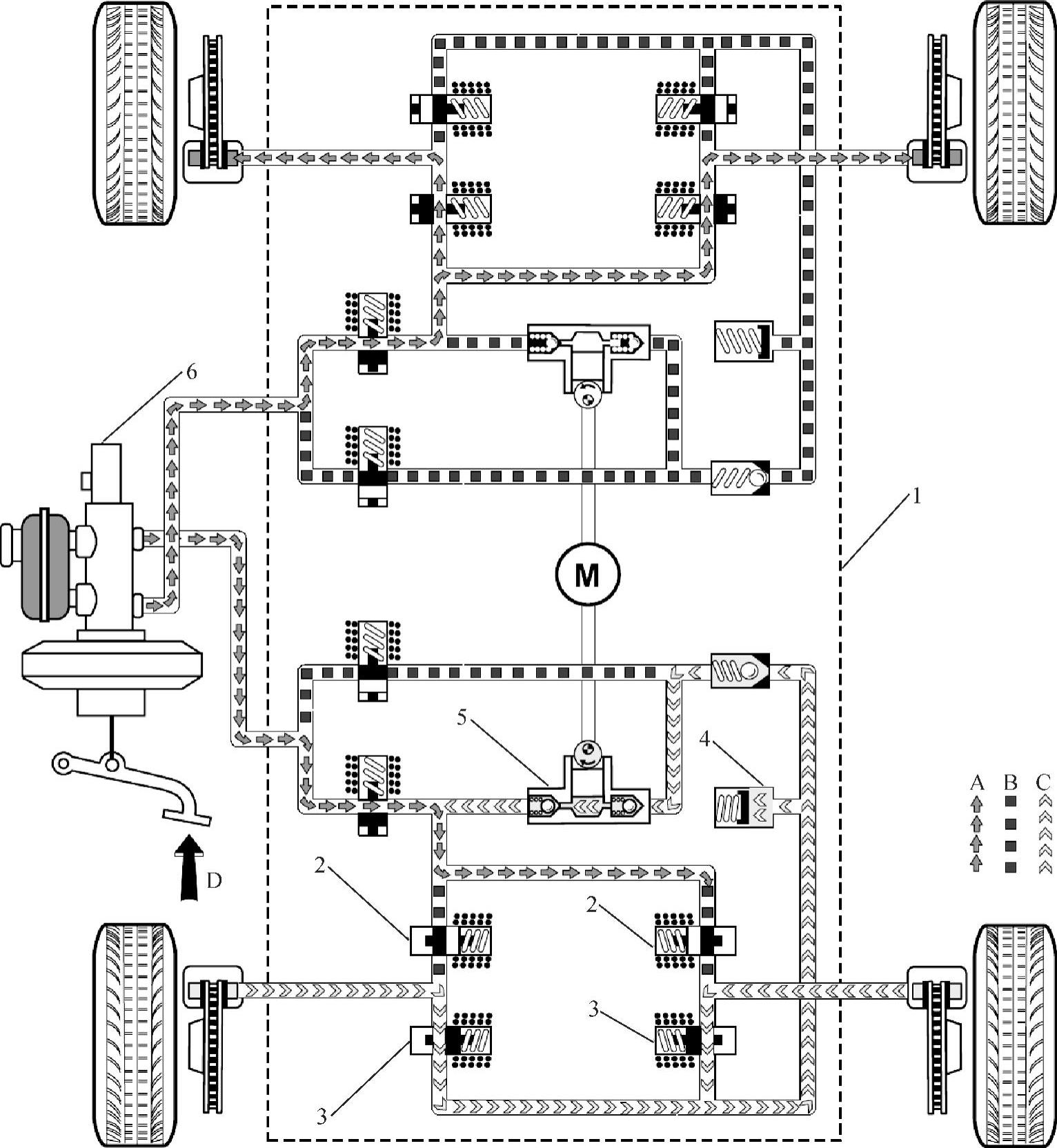
图2-84 EBD减压阶段液压回路
1—液压调节器总成 2—后进口阀 3—后出口阀 4—储能器 5—液压调节器泵 6—制动总泵 A—常规的制动液压力 B—停止的制动液压力流(电磁阀闭合) D—制动踏板踩下
电子控制单元向液压调节器发送一个控制信号,使后出口阀和后进口阀恢复其常态静止位置。
总泵制动液A像常规制动操作那样被直接引入后制动轮缸。先前减小的后轮制动液压力现在已增加到正常的总泵制动液压力,前后轮制动液压力再次相等。参见“非ABS制动”,了解常规制动操作的详情。
这些EBD阶段不断重复,直到电子控制单元检测到车轮速度达到平衡或者制动踏板压力消除为止。根据路面情况,每秒钟大约有4到6个控制循环。
④牵引力控制(TCS模式)。假设左后轮开始滑移。如图2-85所示,电子控制单元监测并比较每个车轮速度传感器的信号以确定车轮是否滑移。如果电子控制单元检测到由于路面湿滑或发动机转矩过大而导致车轮纵向空转,且没有施加制动,则电子控制单元将切换到TCS(牵引力控制系统)模式。
在TCS模式中,电子控制单元首先向发动机控制模块(ECM)发送一个串行数据通信信号,请求减小发动机转矩。
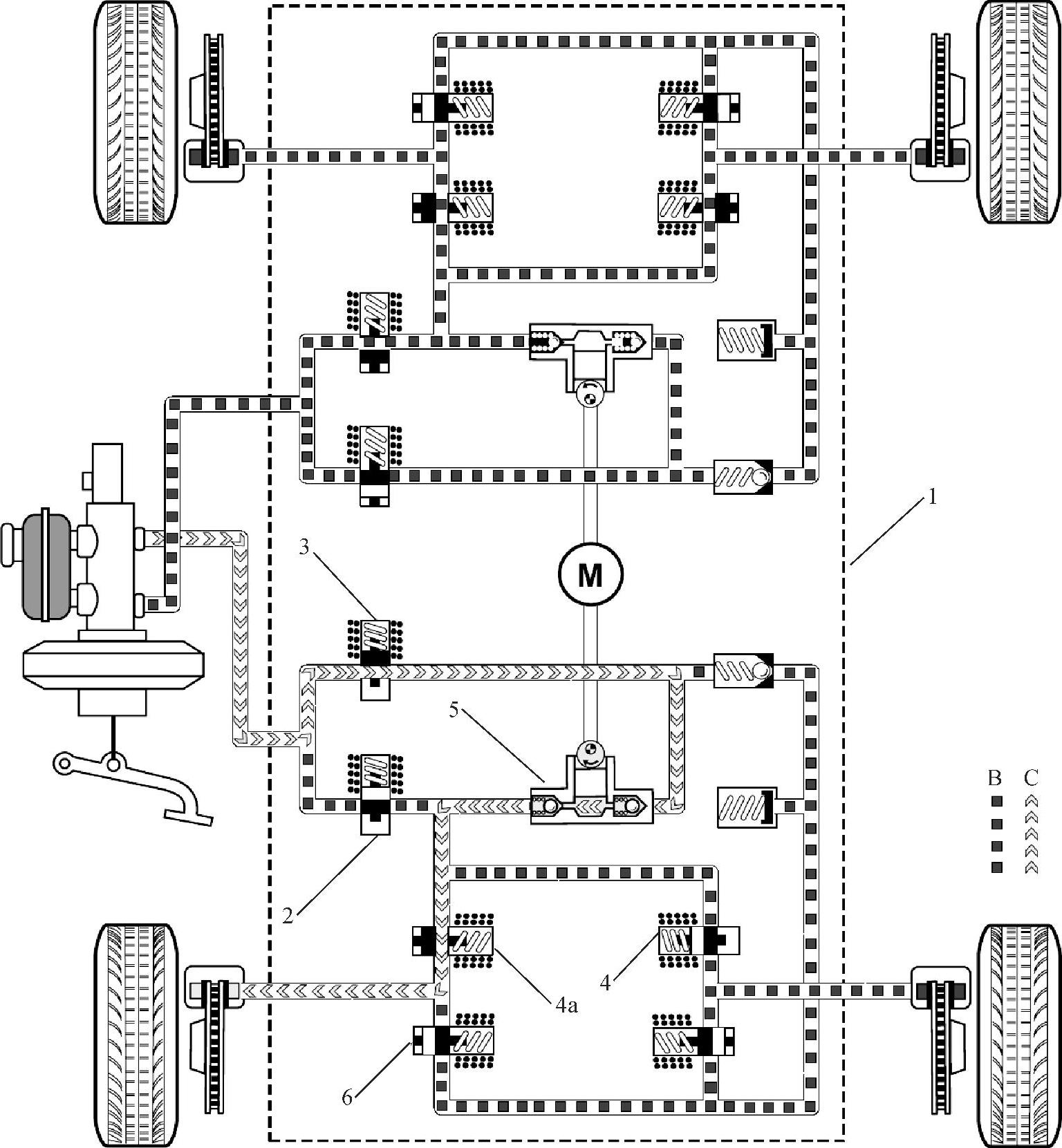
图2-85 TCS模式-制动干预液压回路
1—液压调节器总成 2—隔离阀 3—起动阀 4—右后进口阀 4a—左后进口阀 5—液压泵 6—左后出口阀 B—停止的制动液压力流(电磁阀闭合) C—液压调节器泵产生的制动液压力流M—泵电动机
当牵引力控制系统激活时,发动机功率可能会有轻微损失。功率减小是由发动机管理系统的发动机转矩减小功能造成的。
如果在发动机控制模块已执行发动机转矩减小功能后仍能检测到左后轮空转,则电子控制单元将实行TCS制动干预。
TCS制动干预:
电子控制单元监测并比较每个车轮速度传感器的信号以确定车轮是否滑移。当发动机控制模块在路面湿滑或发动机转矩过大情况下执行了发动机转矩减小功能并且没有实行制动时,如果电子控制单元仍然检测到左后轮滑转,则电子控制单元将切换到TCS制动干预阶段。在这个阶段,电子控制单元将向液压调节器1发送一个信号以:
关闭后隔离阀2,打开后起动阀3,关闭右后进口阀4,运行液压调节器泵5。
在TCS模式下,这将产生下列操作,这些操作每秒会执行约4~6次,并对一个或两个后轮产生作用:当液压泵积累了制动液压力时,后隔离阀将关闭,以使后轮制动回路与总泵隔离开来,防止制动液返回总泵。
右后进口阀将关闭,以隔离右后轮液压回路,使液压调节器只向左后轮提供制动液压力。
后起动阀被打开,使制动液从制动总泵进入液压泵中。(https://www.xing528.com)
液压泵将制动液压力C施加到左后轮制动轮缸上,以阻止左后轮空转。
液压调节器像在ABS模式那样调节左后进口阀4a和左后出口阀6,以便获得最大的路面牵引力。ABS和TCS模式之间的差别在于,在TCS模式下是增加制动液压力以阻止车轮空转。而在ABS模式下是减小制动液压力以避免车轮抱死。
如果在TCS模式下人工实行制动,则制动开关将向电子控制单元发送一个信号,以退出TCS制动干预模式,而允许人工制动。
⑤电子稳定程序(ESP)。电子稳定程序(ESP)用于在高速转弯或在湿滑路面上行驶时提供最佳的车辆稳定性和方向控制。
电子稳定程序包括以下部件:
用于确定驾驶员转向输入的转向盘转角传感器,电子控制单元利用它来计算驾驶员想要的行驶方向;用于测量车辆绕其纵轴旋转角度的横向偏摆率传感器,电子控制单元利用它来计算车辆的目标行驶方向,以及牵引力控制系统的主动制动和发动机转矩减小功能,用于防止车轮空转。
当电子稳定程序检测到车轮侧向滑移或计算得到的车辆方向偏离实际的车辆方向时,电子稳定程序将利用ABS-TCS系统中的发动机转矩减小功能和主动制动控制功能来稳定车辆并使车辆正确转向。
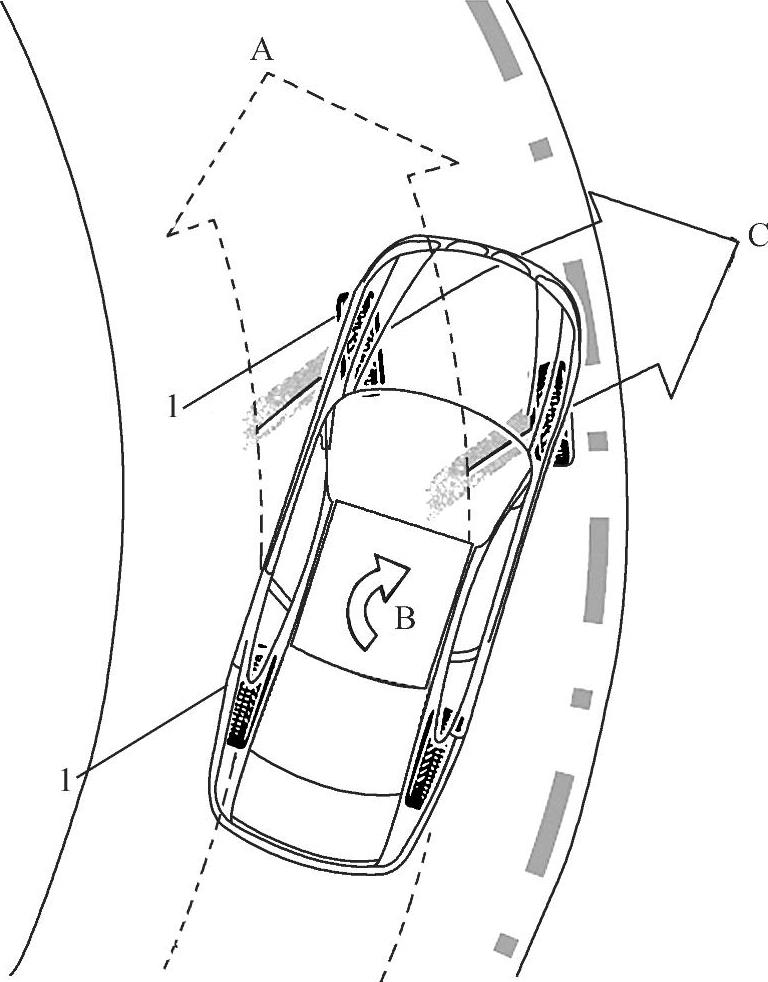
图2-86 转向不足
1—内侧车轮
ESP发动机转矩减小:
电子稳定程序(ESP)监测车轮速度传感器、横向偏摆率传感器和转向盘转角传感器以确定车轮是否侧向滑移。当检测到车轮侧向滑移时,电子稳定程序将首先利用牵引力控制系统中的发动机转矩减小功能并向发动机控制模块(ECM)发送一个串行数据通信信号,请求减小发动机转矩。另外,如果电子稳定程序仍然检测到车轮侧向滑移,则电子稳定程序将实行主动制动干预。
ESP制动干预:
a.转向不足。当电子控制单元接收到输入信号并确定车辆开始转向不足时,电子稳定程序将实行主动制动干预。
转向盘转角传感器向电子控制单元发送一个驾驶员期望的转向方向A的信号,横向偏摆率传感器检测到车辆开始打转B,同时车辆前端开始向方向C滑移,如图2-86所示。
电子稳定程序利用ABS-TCS系统中已有的主动制动控制功能向车辆的一个或两个内侧车轮1施加计算得到的制动力,以稳定车辆并朝驾驶员想要的方向转向。向内侧车轮1施加制动力将减慢车辆的内侧,这将促使车辆绕其纵轴A旋转,如图2-87所示。
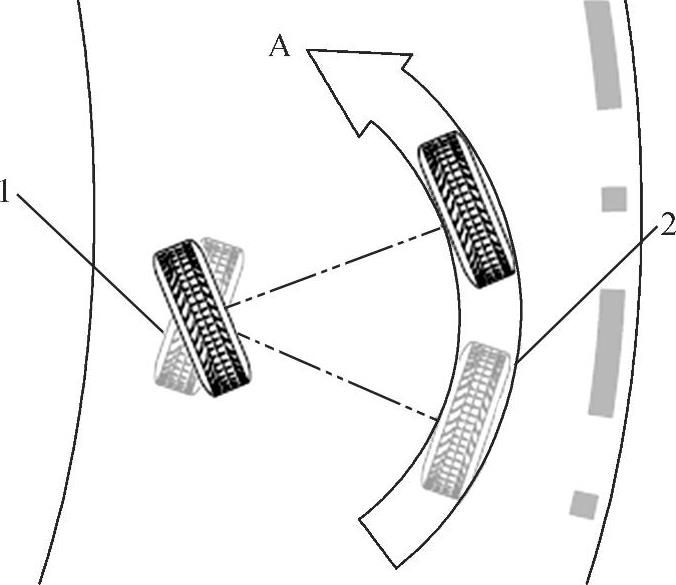
图2-87 制动内侧车轮使车辆绕纵轴向内旋转
1—内侧车轮 2—外侧车轮
假设电子控制单元检测到车辆开始出现转向不足情况。如图2-88所示,电子控制单元监测并比较来自横向偏摆率传感器、转向盘转角传感器和每个车轮速度传感器的信号,以确定车轮是否滑移。当电子控制单元检测到车辆转向不足时,电子控制单元将向液压调节器1发送一个信号以:
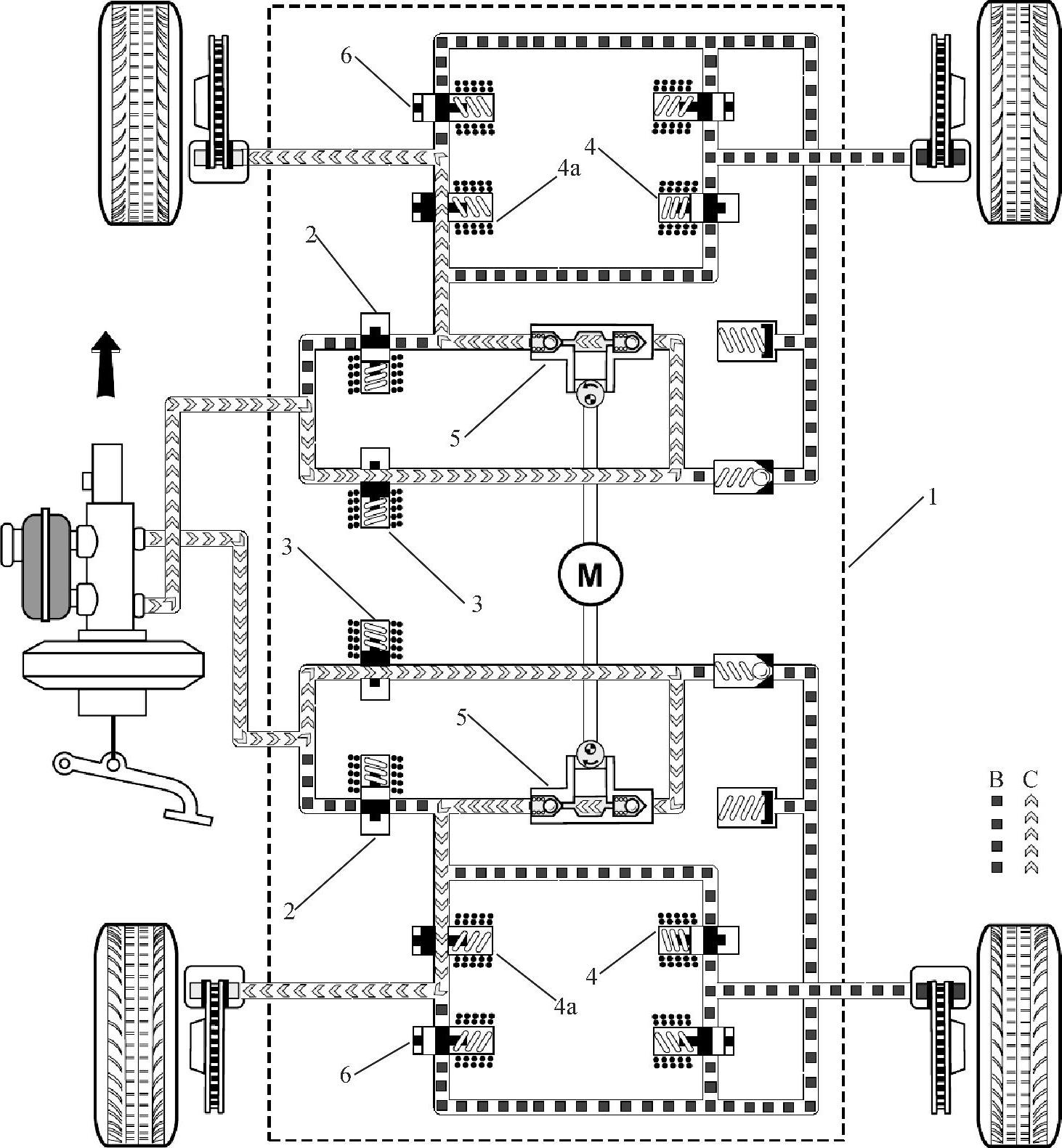
图2-88 ESP转向不足制动干预液压回路
1—液压调节器总成 2—隔离阀 3—起动阀 4—右前和右后进口阀 4a—左前和左后进口阀 5—液压泵 6—左前和左后出口阀 B—停止的制动液压力流(电磁阀闭合) C—液压调节器泵产生的制动液压力流 M—泵电动机
关闭前和后隔离阀2,打开前和后起动阀3,关闭右前和右后进口阀4,运行液压调节器泵5。
这将导致以下操作:
当液压泵积累了制动液压力时,后隔离阀将关闭,以使后轮制动回路与总泵隔离开来,防止制动液返回总泵。
右前和右后进口阀被关闭以隔离右轮液压回路,从而使液压调节器只向左轮提供制动液压力。
后起动阀被打开,使制动液从制动总泵进入液压泵中。
液压泵将合适的制动液压力C施加到左轮制动轮缸上,以使车辆朝驾驶员想要的方向转向。
液压调节器像在TCS模式下那样调节左前和左后进口阀4a及出口阀6,以便获得最大的路面牵引力。
如果在ESP模式下进行人工制动,则制动开关将向电子控制单元发送一个信号,退出ESP制动干预模式并允许常规制动。
b.转向过度。当电子控制单元接收到输入信号并确定车辆开始转向过度时,电子稳定程序将实行主动制动干预。
转向盘转角传感器向电子控制单元发送一个驾驶员期望的转向方向A的信号,并且横向偏摆率传感器检测到车辆开始打转(B),同时车辆后端开始向方向C滑移。如图2-89所示。
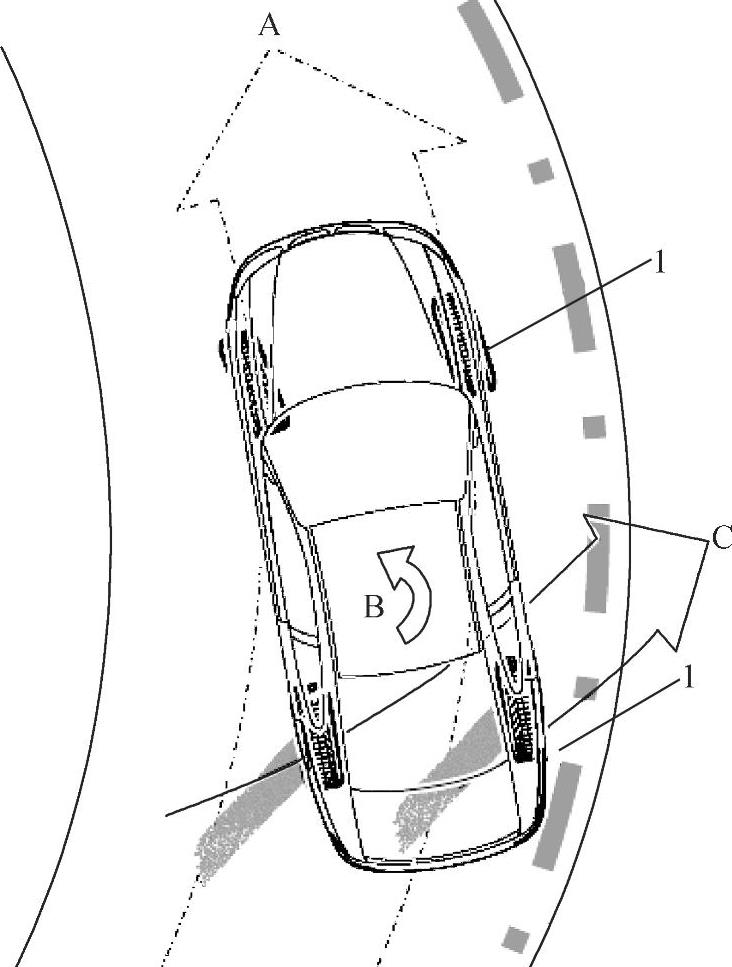
图2-89 转向过度
1—外侧车轮
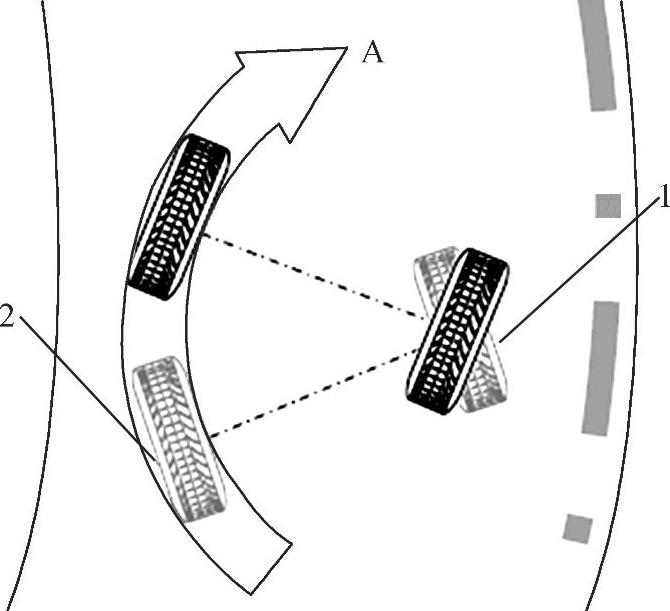
图2-90 制动外侧车轮使车辆绕纵轴向外旋转
1—外侧车轮 2—内侧车轮
电子稳定程序利用ABS-TCS系统中已有的主动制动控制功能向车辆的一个或两个外侧车轮1施加计算得到的制动力,以稳定车辆并向驾驶员想要的方向转向。
向外侧车轮1施加制动力将减慢车辆的外侧,这将促使内侧车轮绕车辆纵轴A旋转,如图2-90所示。
假设电子控制单元检测到车辆开始出现转向过度情况。如图2-91所示,电子控制单元监测并比较来自横向偏摆率传感器、转向盘转角传感器和每个车轮速度传感器的信号,以确定车轮是否滑移。当电子控制单元检测到车辆转向过度时,电子控制单元向液压调节器1发送一个信号以:
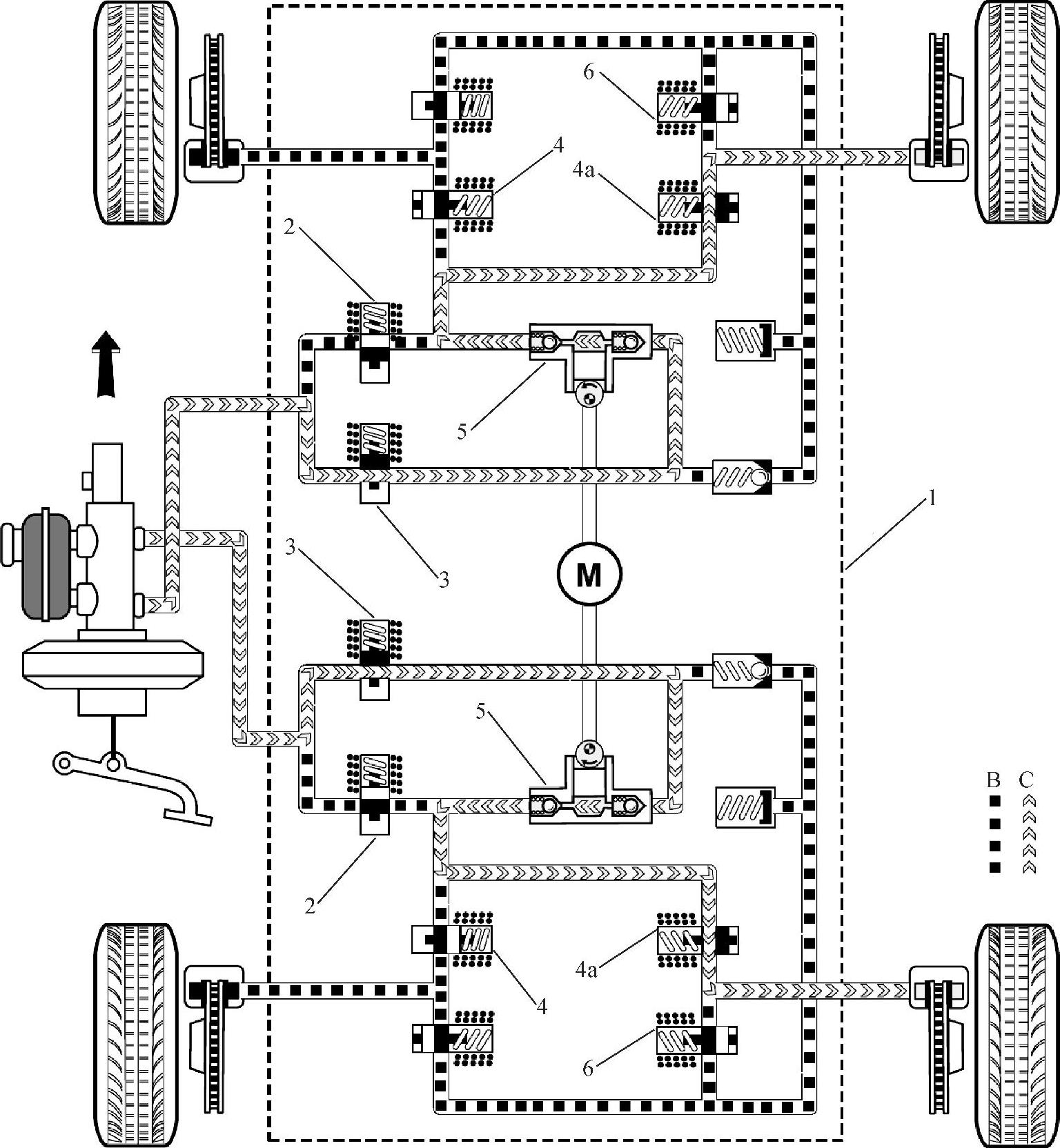
图2-91 ESP转向过度制动干预液压回路
1—液压调节器总成 2—隔离阀 3—起动阀 4—左前和左后进口阀 4a—右前和右后进口阀 5—液压泵 6—右前和右后出口阀 B—停止的制动液压力流(电磁阀闭合) C—液压调节器泵产生的制动液压力流 M—泵电动机
关闭前和后隔离阀2,打开前和后起动阀3,关闭左前和左后进口阀4,运行液压调节器泵5。
这将导致以下操作:
当液压泵积累了制动液压力时,后隔离阀将关闭,以将制动液回路与总泵隔离开来,防止制动液返回总泵。
左前和左后进口阀被关闭以隔离左轮液压回路,从而使液压调节器只向右轮提供制动液压力。
起动阀被打开,使制动液从制动总泵进入液压泵中。
液压泵将合适的制动液压力C施加到右轮制动轮缸上,以使车辆朝驾驶员想要的方向转向。
液压调节器像在TCS模式下那样调节右前和右后进口阀(4a)及出口阀(6),以便获得最大的路面牵引力。
如果在ESP模式下进行人工制动,则制动开关将向电子控制单元发送一个信号,退出ESP制动干预模式并允许常规制动。
(2)奥迪Q7新型电控行车稳定系统(ESP)简介 奥迪Q7使用了Continental-Teves公司生产的名称为MK25E1的新型ESP系统。
新型的MK25E1 ESP系统采用2个线性控制式转换阀、4个线性控制式进气阀和1个集成式压力传感器。与之前的ESP系统相比,它具备更多的功能、更大的液压泵、功率更高的电动机、空间更大的内部气室,且带有前进/后退识别和安装位置识别的主动式转速传感器。
Teves公司新型的MK25E1 ESP系统在原有的功能(制动防抱死系统、电子制动力分配、牵引力控制系统、电子差速锁、发动机牵引转矩调节系统、液压制动辅助系统)上还增加了如下新功能:
制动监控系统(仅用于带有自适应巡航控制系统的汽车)、列车稳定功能、防侧翻稳定功能、制动力衰减辅助系统(FBS)、制动盘清洗器、紧急制动信号和越野模式。
①制动监控系统(braking guard)。当本车迫近前方车辆并有碰撞风险时,该功能自动向驾驶员发出警告。此功能要求车辆必须装备有自适应定速巡航系统(ACC)。ACC雷达传感器能够测量出前方行驶车辆的距离及其车速。ACC控制单元处理这些测量值并评估是否存在碰撞危险。必要时将分两级发出警告:
a.同时发出视觉和听觉信号进行第一级警告。
b.短时间内建立制动压力。ACC控制单元为此发出一条CAN信息,并向ESP控制单元提出制动要求。ESP控制单元控制回流泵并对前轴进行短时制动。
即使ACC没有被激活,制动监控系统仍会处于启用状态。
②列车稳定功能。该功能用于安装有拖车挂钩的汽车。在某些行驶状态下,拖车的小幅摆动可能会自行加剧,并导致危险的行驶状态。这类情况通常出现在75~120km/h的车速下。如果在高于此临界车速下出现摆动,则摆动的幅度将持续增加。拖车的这种往复式摆动还会导致牵引车围绕其垂直轴线做周期性摆动。
偏转率传感器G202可以对这种偏转情况进行识别,并由ESP控制单元J104进行分析。最初,ESP控制单元会对前轴进行间歇式短时调整,进行校正。如果调整效果不足,ESP控制单元将会指示发动机控制单元J220降低转矩输出,进而降低车速。同时,ESP还会同时对四个车轮进行制动。另外,挂接拖车并建立电气连接后,ESP控制单元可以进行自动识别。
③侧翻稳定功能。在有侧翻危险情况下,将通过降低横向加速度使汽车保持稳定。这项调整是通过在前轴上施加强力制动而实现的,另外,发动机转矩也会有所降低。此时,驾驶员会感觉到系统的干涉作用,尽管可能并未意识到当前的危险行驶状态(从约0.6g的横向加速度起)。在调整过程中,ESP指示灯将会闪烁。
④紧急制动信号。在减速度非常大的紧急制动中,或者在ABS介入的制动中,报警闪光灯都会开启。
制动压力的建立通过激活主动式制动助力器并且利用ESP主动建立压力而实现。主动式制动助力器在ESP回流泵吸气侧迅速建立压力。这使得ESP得以迅速建立制动压力。
⑤制动力衰减辅助系统(FBS)。当因摩擦片与制动盘之间的摩擦系数较低使制动效果下降时,ESP泵会额外产生压力以弥补制动力的衰减。在检测到制动压力较高但车轮未达到预期控制效果时,此功能将会介入。当驾驶员明显减轻制动压力后,该功能自动关闭。对此没有显示提示。
⑥制动盘清洗器。当车速信号>50km/h且在CAN总线上出现前风窗刮水器启用命令(包括间歇式刮水)时,前轮制动摩擦片将会每隔约3km接合一次制动,以去除制动盘上的水膜。为此,ESP泵会间歇式启用并产生约0.08~0.12MPa的压力约8s。
此功能没有显示提示。一旦驾驶员主动进行制动操纵,该系统的里程计算自动归零。
⑦越野模式。该模式的基本原理在于,为了改善车辆在松软地面上(越野)行驶时的牵引力及制动性能,对ESP/ASR/EDS和ABS的干预进行了优化。启用ESP/ASR和ABS干预功能的临界值根据车速的不同而变化。
允许更大一些的车轮打滑量,控制系统不会因此被激活。电子差速锁功能(EDS)在转速差较小时就已启动。
启动:短时按压(<3s)ESP按钮,启动该模式。
显示:驾驶员信息系统显示屏中显示信息“off road”(越野),黄色ESP指示灯亮起。
在越野模式时,列车稳定功能将被关闭,否则越野路况可能造成关于拖车摆动的误报警。
“倒车ABS”激活:当车辆在上坡路面中向后溜车时,EBV功能会使车辆后轴上的制动力小于前轴。而在车辆倒车行驶时,对于制动而言,后轴实际上已经成为了前轴,因此后轴上的制动力也会更大。
启动“下坡行驶辅助功能”:在最大坡度约为10%~15%且车速未超过20km/h时,下坡行驶辅助功能通过对制动进行干预为驾驶员提供支持。下坡行驶中,由于路面光滑度不同,或由于某车轮因路面不平而离开地面,都可能造成车轮转速不同,此时该功能将自动启动。此功能的目的在于,在较陡的下坡路段行驶时,无需驾驶员干涉而使汽车保持恒定车速。
提示:在越野模式下无法利用ESP按钮关闭ESP系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。