



一台W220奔驰车右前轮的悬架过低,车主怕继续行驶会损坏车辆,故拖车进厂维修。
首先,从外观上看,该车右前轮悬架明显低于其他车轮的高度,但未完全“趴下”。着车,反复转动转向盘至两端极限(此举是为了激活转向角传感器),高度未见恢复。熄火后重新起动发动机,故障灯熄灭,但车辆一起步,故障灯又重新亮起。
由于该车的主动车身控制系统较为先进,结构原理也较为复杂,原厂提供的是英文资料,判断故障时首先应对ABC系统的结构原理做系统的了解与分析。故在为车辆进行维修之前,结合英文资料对该车的ABC系统的结构和原理做了一番分析。
该车是带有ADS(自适应阻尼系统)的ABC(主动车身控制系统),主要可分为液压控制回路与电子控制系统。其液压控制系统主要由径向活塞式液压泵、前/后储压器、液压油冷却器、前/后悬架支柱、油压供应阀单元、前阀门单元、后阀门单元等组成。液压控制回路的主要部件在车上的位置如图1-157所示。
其电子控制系统的主要部件在车上的分布如图1-158所示。
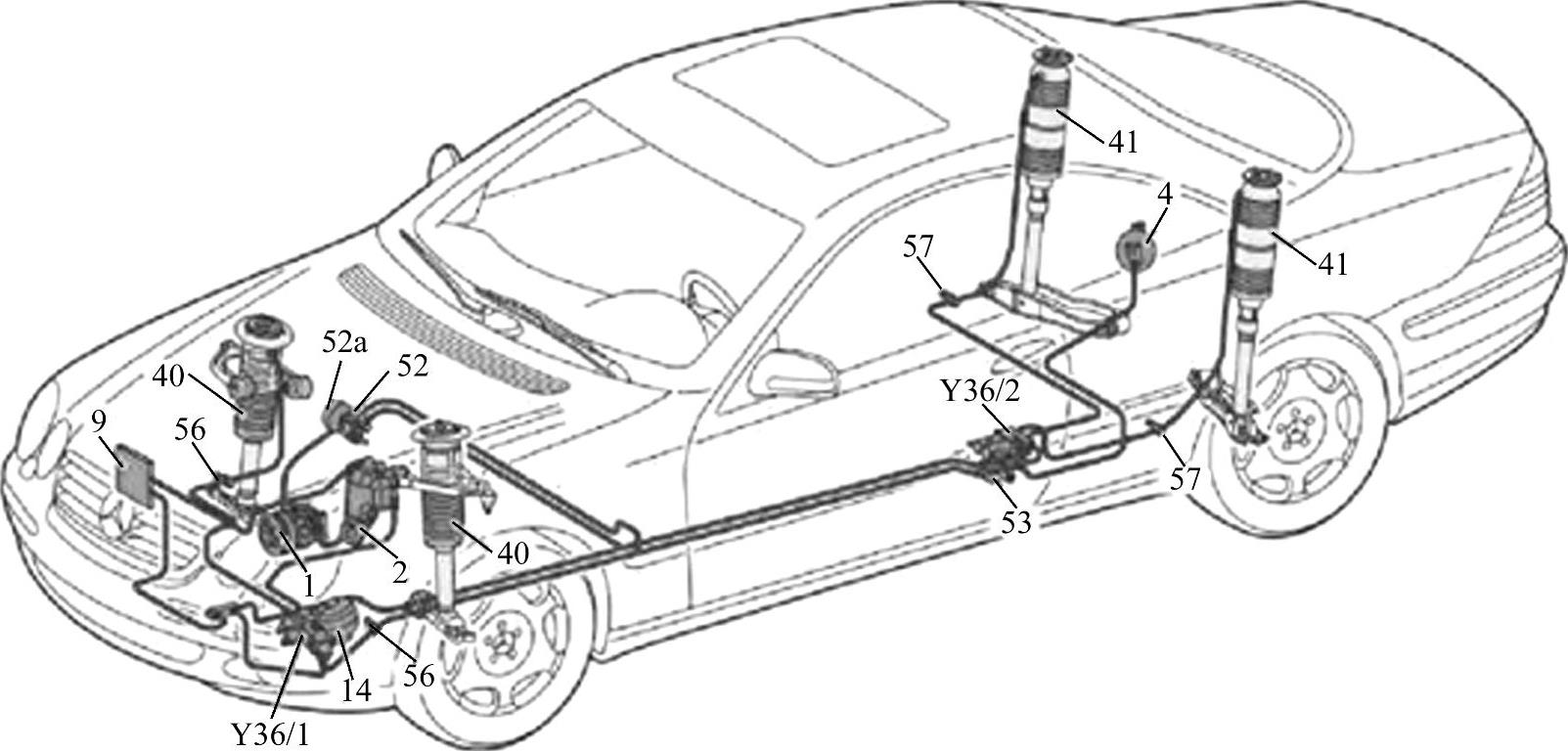
图1-157 ABC液压控制回路主要部件的分布
1—径向活塞式液压泵 2—储液罐 4—后储压器 9—液压油冷却器 14—前储压器 40—前悬架支柱 41—后悬架支柱 52—油压供应阀单元 52a—油压脉动衰减器 53—回流储压室 56—前排气螺钉 57—后排气螺钉 Y36/1—前阀门单元 Y36/2—后阀门单元
主动悬架控制(ABC)控制模块与其他系统一样,通过控制器区域网络CAN连接,并根据系统所需,从各个相关系统中接收输入信号。主动悬架控制主要从自动变速器控制(ETC)模块、电控车辆稳定行驶系统(ESP)控制模块、发动机控制模块(ECM)、分电式分火系统(DI)控制模块、舒适型和运动型开关、水平控制开关、左前信号采集及促动控制模组(SAM)控制模块等系统中接收输入信号,再结合ABC系统中的各个传感器,通过系统控制模块的计算、处理,来决定必须控制何种控制功能,并将处理后的信号传送给相对应的执行器,进行系统的操作,达到其控制的目的。
该系统液压回路的工作图参见图1-119。
ABC主动车身控制系统的主要部件及其功能如下所述。
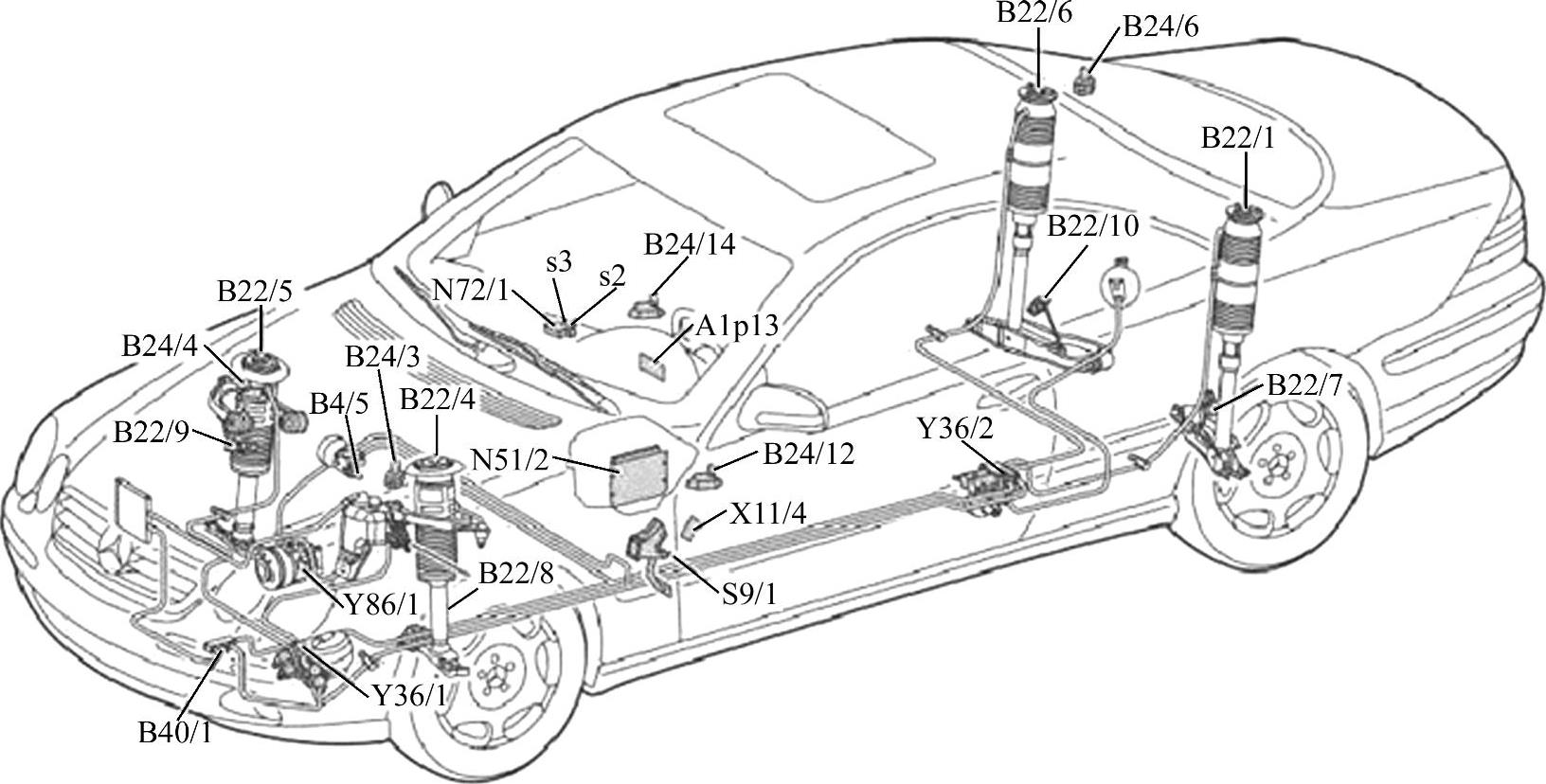
图1-158 ABC电子控制系统主要部件的分布
A1p13—多功能显示屏 B4/5—ABC系统油压传感器 B22/1—左后支柱柱塞行程传感器 B22/4—左前支柱柱塞行程传感器 B22/5—右前支柱柱塞行程传感器 B22/6—右后支柱柱塞行程传感器 B22/7—左后水平传感器 B22/8—左前水平传感器 B22/9—右前水平传感器 B22/10—右后水平传感器 B24/3—左前车身加速度传感器 B24/4—右前车身加速度传感器 B24/6—右后车身加速度传感器 B24/12—ABC横向加速度传感器 B24/14—ABC纵向加速度传感器 B40/1—ABC油温传感器 Y36/1—前阀门单元 Y36/2—后阀门单元 Y86/1—ABC吸入限制阀 N51/2—ABC控制模块 N72/1s2—水平调整开关 N72/1s3—“舒适”与“运动”模式开关 S9/1—制动灯开关(4-pin) X11/4—数据传输连接器(https://www.xing528.com)
1)ABC主动悬架控制模块。执行主动悬架控制模块的所有功能,收集各传感器信息,综合处理并向各执行器发出电信号,实现电子控制功能。由信号调节、功能逻辑部件、安全电路等组成。
2)加速度传感器。感应车身加速度,提供给控制模块一个车身垂直加速度的计算值。
3)水平传感器。该传感器为霍尔式传感器,通过检测横向控制臂的位置来确定各个车轮处的车身水平高度,将数值以电压形式传送给控制单元。
4)ABC压力感应器。检测系统压力(系统压力由径向活塞泵吸入的量决定,通过吸入限制器阀来控制)。
5)ABC油温度感应器。用来感应系统油温,监测油冷却器的工作情况。
6)ABC纵向/横向加速度传感器。用来计算俯仰移动及侧倾移动。
7)ABC吸入节流阀。控制系统中径向活塞泵吸入的量。
8)前/后轴阀装置。根据水平高度信号及弹簧支柱总成的移动信号,由控制单元输出的阀控制数据,完成控制弹簧的调节功能。由两个控制阀(三位四通电磁阀)和断流阀(二位二通电磁阀)组成,控制阀控制流入和流出弹簧支柱的油,断流阀防止车辆停止时车身高度降低。
9)悬架。控制模块依据高度位置、车身垂直加速度、纵向和横向加速度及车辆速度来确定特别优化的悬架和减振特性。通过对每个车轮的控制阀的控制,使每个车轮的流量符合特定的要求。
系统控制模块收集来自各个传感器的信号,计算处理后,输送给四个控制阀、四个断流阀和一个节流阀。
根据系统的结构及各部件的工作原理,不难分析故障范围应为右前轮的水平传感器及右前轮阀装置。接上专用检测电脑,对该车的底盘系统进行了检测。测出故障码:C1132(即右前轮水平高度),右前轮悬架高度及悬架故障停止工作。检测电脑要求检查是否系统泄露,经检查无泄露。由于右前轮水平高度已经是不达标的,因此,检测电脑的“水平高度”故障不一定就是水平高度传感器。连接上检测电脑,进入底盘系统,先将原来的故障码清除。重新起动发动机,检测电脑进入悬架系统读取数据流。按下升高悬架开关,观看四轮车轮的悬架升起过程中水平传感器的变化,这时发现右前轮水平传感器变化较快,并且比其他三个传感器早一步停止了变化,而此时右前轮的高度比其他三个车轮的高度要低得多。检查水平传感器,发现水平传感器的横向控制臂有松动现象。看来正是由于右前轮水平传感器控制臂松动,向ABC控制单元传送了错误的高度信号,ABC控制单元从有误的水平高度信号中处理、计算后,停止了右前轮弹簧支柱控制阀的工作信号,使得该轮的悬架高度达不到要求。
更换水平传感器,清除故障码后进行路试,故障排除。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。