



(1)定律1:提高理想化水平 该定律是指技术系统向提高理想化水平的方向进化。公式为

增加技术系统的效益,如实现更多的功能、更好地实现功能,减少成本或副作用,均可增加技术系统的理想化水平。该定律是技术进化的根本性定律,描述了技术系统进化总的方向,也是判断一个技术创新是否有效的重要判据。
【例8-1】功能不断增加的手机。
最初的手机仅有通话功能,目前的手机不仅可以通话,还可以拍照,利用互联网获取各种信息,查英文单词等。功能的增加并没有使价格增加,相反,价格还不断降低。
路线1-1:孔洞程度增加。
图8-2所示为孔洞程度增加路线。为了提高理想化水平,最初采用实体的系统增加一个孔洞,然后增加几个孔洞,之后再采用多孔洞实体和毛细孔实体,最后采用活性物质填充实体。空心砖、空心楼板、保温杯等均是按该路线进化的实例。

图8-2 孔洞程度增加路线
(2)定律2:子系统的非均衡发展 组成系统的子系统的发展是非均衡的,系统越复杂,非均衡的程度越高。非均衡的出现是由于系统中的某些子系统满足了新的需求,从而其发展快于其他子系统。非均衡将导致系统内部子系统间或子系统与系统间出现冲突,不断消除该类冲突可使系统得到进化。消除冲突的手段是新发明的应用。
【例8-2】自行车的进化过程。
自行车是1817年发明的。被称为“hobby horse”的第一辆自行车由机架及木制的轮子组成,骑车人的脚提供驱动力。从工程的观点看,该车存在不舒适、驱动费力等缺点。该车存在的问题是增加速度的需求与骑车人自然能力之间的冲突。
1839年诞生了靠连杆机构驱动后轮的自行车,但由于该车发明者地处偏僻,所以没有得到推广。1860出现了驱动前轮的脚踏自行车,为了提高速度,前轮变大,但同时可操控性和危险增加。
1878年,脚踏驱动前轮、链轮及链传动的自行车设计成功,为了控制速度,出现了车闸。
1879年,脚蹬驱动后轮、链轮及链传动的自行车设计成功,速度可以达到很高,但前轮直径依然较大,不舒适。到1885年,前、后轮直径相同的现代自行车设计成功,但零部件材料不过关,影响了自行车速度的进一步提高。
20世纪,各种新材料用于自行车零件。
在自行车进化的过程中,全世界申请了相关专利10000件。
【例8-3】冰箱的进化过程。
1803年,Moor发明了第一台冰箱。他当时的工作是为华盛顿的用户配送奶酪,夏天需要某种装置产生低温以便保存奶酪。Moor制作了一个具有双层壁的大箱子,在中空的双壁之间填充冰,以达到降低温度保存奶酪的目的。其冲突为有用功能得到了实现,但冰是在冬季采集的,而使用是在夏季。
1850年,Gorrie在美国佛罗里达发明了用于制冷的压缩机。Gorrie的工作是用冰护理疟疾病人,而冰是以很高的价格从马萨诸塞州运来的。他发明了一种压缩机可以制冰,但由于不信任其发明,找不到投资人。1890年由于食品存储及巧克力工业需要大量的冰,所以制冰机投入生产,以弥补对冰的需求缺口。该设计的冲突为体积大,不适合家庭使用。
到19世纪末,家用制冰机诞生了。其冲突为该机器要消耗大量的燃料,如木材、煤、煤油,因此对于普通家庭,其运行成本太高。
1918年,通用电器开始为厨房生产现代自动冰箱,并称为“Kelvinators”。其冲突为带驱动的压缩机噪声大,且泄漏氨及硫化物等气体。1926年,压缩机加上了密封罩,既隔声又防止气体泄漏。1922年,不带压缩机(吸收型)的厨房用电冰箱诞生了。这两种冰箱处于竞争状态。后一种产品的冲突为噪声小,但制冷能力差。
后来虽然还发明了基于不同原理的冰箱,但带有压缩机的冰箱一直是家用市场的领导者,其原因是生产企业不断增加新的功能,如自动除霜等。玻璃纤维热绝缘材料、半导体制冷技术、相变能量储存材料等的开发与应用,不断提高了冰箱的性能与质量。
【例8-4】直升机的发展。
人类的航空发展史始于16世纪。鸟类飞行的现象引导着早期航空的发展。鸟类的飞行大体上可划分为三个阶段:起飞、飞行及降落。起飞可分为两种,跑步起飞和跳跃起飞;飞行也可分为两种,前进飞行和空中停留。
一开始,人们想利用可上下移动的翅膀而如鸟类般飞行,但是此构想除了应用于制造玩具外,并没有真正地让人类飞上天空。19世纪发明了固定翼飞机,但这只能仿真鸟类的跑步起飞以及前进飞行,对于跳跃起飞及空中停留的现象却一直无法用该技术实现。必须解决在无前进速度下的空中停留以及在限制的环境中垂直起飞和降落的问题。而此方向的探讨一直持续到直升机的开发。
直升机面临的最大问题有三个:
1)减小机身结构及发动机的质量,以便飞行器有足够剩余的升力可供使用。
2)抵消因主旋翼转动所产生的扭力。
3)飞行时如何操控。
首先减小质量主要朝着利用较轻材料和提高发动机的效率发展,即从提高发动机所能提供的有效功率和发动机的重量比着手。前者促进了铝合金的使用和复合材料的使用,而后者因限于早期只有往复式发动机而无法实现突破性进展,一直到后来发明了涡轮发动机才有进一步的发展。其次为克服旋翼所产生的扭力,出现了目前所能看到的各种外形的直升机,如主尾旋翼、横向双主旋翼、前后主旋翼、同轴上下旋翼等。最后,对于飞行的操控则出现了目前主旋翼的通用形态,包括翼插销及翼切面集合倾角(Collective Pitch)和循环倾角(Cyclic Pitch)的控制。所谓集合倾角,即同时改变所有翼片的倾角来达到不同升力的效果,此时升力垂直于旋翼旋转平面。另外,旋翼循环倾角即翼片倾角随着旋转翼的转动做周期性改变,而其功用在于旋翼的升力随着翼片旋转时的位置不同而改变,使得旋翼的旋转平面由水平往侧边倾斜,造成旋翼的升力向旁边倾斜,因此有水平的分量拉升直升机水平飞行。如果其往前倾斜,则直升机也往前飞行。
上述三方面问题不断解决的过程是不断发现冲突并解决冲突的过程。从公元前400年中国人发明竹蜻蜓,到15世纪达·芬奇的直升机构思,一直到今天各种用途直升机的运用,经历了漫长的过程。
应用“子系统非均衡发展”定律的建议步骤如下:
1)确定系统中的不同子系统及其功能。
2)选择感兴趣的子系统及其主要功能。
3)确定由该子系统对其他子系统所产生的副作用或危害,明确冲突。
4)解决冲突。
5)重复1)~4)。
发明问题解决理论中有40条发明原理并可以用于解决冲突。
(3)定律3:动态化增长 该定律是指组成技术系统的结构更加柔性化,以适应性能需求、环境条件的变化及功能的多样性需求。
研发新的技术系统主要是解决一个特定的问题,即至少实现一个特定的功能,并在一个特定的环境下运行。这种系统各组成零部件之间具有刚性连接的特征,因此不能很好地适应环境变化。很多该类系统进化的过程表明,动态化或柔性化是一种进化趋势。在进化的过程中,系统的结构逐步适应变化的环境,而且具有多种功能。
【例8-5】床垫进化过程。
人类的祖先最初是在地面上睡觉的,下面垫上动物的毛皮及树叶。后来睡垫诞生了,它是将毛皮或织物用针线缝制,并填充稻草、动物毛发或羽毛。在人类历史上,这种睡垫或床垫应用了很长时间,但由于该类产品适应性差,所以钢制弹簧被引入床垫的设计中,这类床垫能够较好地分布人体重量,使人感觉更舒服。最近又开发了水床及气垫床,这两种床更能适应人体的形状。现代的高级床垫可以控制任何位置的支撑力,对身体的不同部位,包括头部与腿部进行升、降及按摩等。
路线3-1:向连续变化系统进化,如图8-3所示。

图8-3 向连续变化系统进化路线
【例8-6】汽车的速度控制系统。
早期的汽车速度控制系统是刚性的,发动机与驱动轮刚性连接,汽车运动速度通过发动机转速进行调节。这种调节系统是单态系统。齿轮变速器的引入改变了这种状况,驾驶人通过手柄可以调节汽车运行速度,而发动机转速始终处于最佳转速或其附近。后来还开发了多达12~20种速度的手动齿轮箱。应用手动有级变速的系统是多态系统。汽车速度调节的另一个方向是开发自动调速器,汽车运行速度可以无级调节,该系统为连续变化系统。
路线3-2:向自适应系统进化,如图8-4所示。

图8-4 向主动系统传递的路线
图8-4表明系统进化有三种状态:被动适应、人工分级控制(人工适应)及主动适应。被动适应系统是在没有设置动力驱动或伺服控制机构的条件下,系统能够适应环境的变化。分级控制系统是指操作人员或通过传感器感知的信号下达指令改变系统的构型,从而改变系统的运行状态,但这种系统改变是分级的,而不是连续的。主动适应系统是装有传感器的系统,传感器自动检测环境的变化,并将这种变化传递给控制机构,从而实施控制,改变系统的运行状态。
【例8-7】汽车悬架的进化。
汽车悬架是连接车身与车轮之间全部零件和部件的总称,主要由弹簧、减振器和导向机构组成。当汽车行驶在不同的路面上而使车轮受到随机激励时,由于悬架实现了车体与车轮之间的弹性支撑,有效抑制并降低了车体与车轮的动载荷与振动,从而保证汽车行驶的平稳性与操纵稳定性。图8-5所示为被动悬架工作原理,该类悬架主要由螺旋弹簧和液压减振器组成,当其结构确定后,弹簧刚度和减振器阻尼在汽车行驶过程中不能人为地加以控制。

图8-5 被动悬架工作原理
可切换阻尼式半主动悬架由弹性元件及一个阻尼系数能在较大范围内调节的阻尼器组成,其阻尼系数能在几个离散的阻尼值之间进行切换。虽然它不能随外界输入进行最优控制与调节,但可按存储在计算机内各种条件下最优弹簧和减振器的优化参数指令来调节弹簧的刚度和减振器的阻尼状态。
全主动悬架系统(见图8-6)所采用的执行元件具有较宽的响应频带,以便对

图8-6 全主动悬架系统
A—执行元件 E—比较器 F—力传感器 P—电位器 V—控制阀 1—悬挂质量 2—加速度传感器 3—信号处理器 4—控制单元 5—进油 6—出油 7—非悬挂质量 8—路面输入
车轮的高频共振也加以控制。执行元件多采用电液或液气伺服系统,控制带宽一般至少应覆盖0~15Hz,有的执行元件响应带宽甚至高达100Hz。
路线3-3:向流体或场进化。
增加柔性化的过程通常包含固定或刚性部件被活动或柔性部件代替的过程,因此存在该路线,如图8-7所示。

图8-7 向流体或场传递路线
【例8-8】汽车转向系统的进化。
如图8-8所示,最初是转向盘通过刚性轴转动车轮使其转向,驾驶人使用该类转向系统很困难,并且在出现交通事故时转向盘很容易伤害驾驶人。为了改进已有系统,刚性轴中间增加了一处铰接,转向盘的位置可以适当调整,车轮的方向控制较容易。后来,将一处铰接变成两处铰接。继续改进系统,将铰接换成柔性轴,之后又改成液力转向系统,最后改进为电动转向系统。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-8 汽车转向系统进化过程
(4)定律4:向复杂系统进化 技术系统由单系统向双系统及多系统进化。单系统具有一个功能,双系统含有两个单系统,这两个单系统可以相同,也可以不同。多系统含有三个或多个相同或不同的单系统。将单系统集成为双系统或多系统是系统升级的一种形式。形成复杂系统的方法是将已有的两个或多个相互独立的单系统集成。集成后的系统实现性能提高,新的有用功能显现。因此,由单系统向双系统及多系统进化是技术系统进化的一种趋势,如图8-9所示。
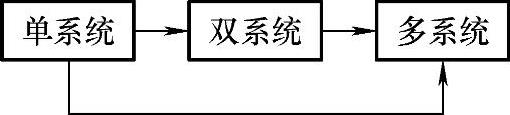
图8-9 单系统向双系统及多系统进化
【例8-9】双系统。
剪刀是由两把刀组合的结果,眼镜是两镜片集成的结果,双筒猎枪是单筒猎枪集成的结果。双筒望远镜是两个单筒望远镜集成的结果,如图8-10所示。

图8-10 由单筒望远镜向双筒望远镜进化
【例8-10】多系统。
多色圆珠笔、一版邮票、多抽屉橱柜、多缸内燃机、千层饼都是多系统。
路线4-1:增加部件的多样性。
同质双系统与多系统的组成部件是相同的,如眼镜的两个镜片具有相同的度数,刷子的毛发是相同的。性能变化的双系统与多系统的组成部件具有相似性,但颜色、尺寸、形状等特征不同,如具有两种密度齿的梳子、一盒不同颜色的粉笔等。非同质双系统与多系统含有不同的部件,部件本身功能也不同,如瑞士军刀(见图8-11)、工具箱内的不同工具等。反向双系统与多系统含有功能或性能相反的部件,如带橡皮的铅笔、防阳光的眼镜等。所有这些技术进化的过程说明,存在增加部件多样性的一条进化路线,如图8-12所示。

图8-11 瑞士军刀

图8-12 增加部件多样性的进化路线
双系统及多系统的组成部件多样性会产生新的效果,如双金属片由线胀系数不同的两金属条组成,对于少量的温度变化,它将产生较大的变形。任何单金属片没有这种效果。在同质双系统或多系统的基础上,使其组成部件的性能变化,可以得到少量变化的多样性,如眼镜的镜片往往具有不同的度数,以适应每只眼睛不同近视程度的需求。
(5)定律5:向微观系统进化 技术系统是由物质组成的,物质分为不同层次及不同的微观物理结构。常用的结构为晶体结构、分子团、分子、原子、离子、基本粒子。宏观的物质结构由微观的物质结构组成。技术系统由宏观向微观系统传递是一种进化趋势,即由宏观的物质所完成的功能,如轴、杠杆、齿轮等的功能,由微观物质完成。由宏观系统向微观系统进化的过程可以解决宏观系统中出现的冲突。
路线5-1:向微观系统进化。
该路线如图8-13所示,它表明系统由晶体或分子团状态向分子、原子与离子、基本粒子进化。

图8-13 向微观粒子传递路线
【例8-11】金属切削刀具的进化。
传统的金属切削方法为车、铣、刨、磨,其刀具为车刀、铣刀、刨刀、砂轮,这些刀具处于图8-13所示进化路线的初始状态。之后出现了化学腐蚀与电化学加工,金属是被其表面的可控化学反应腐蚀掉的,这种加工方式处于路线的分子状态。等离子加工处于该技术路线的第三个状态。最高级的状态是采用激光加工,激光视为基本粒子束。
该定律的应用遵循以下两条规则:
1)微观系统或结构的采用应实现宏观结构或系统所完成的功能。如电化学加工是利用分子之间的相互作用完成加工,即用分子加工代替传统刀具在力的作用下直接加工工件。
2)微观结构控制宏观结构的特性及行为。如对不同光照变色的眼镜采用了该规则,由于这种眼镜的镜片在强光下变黑,戴该类眼镜的人不再需要太阳镜或遮阳罩。制造过程中在镜片中添加银氯化物,使镜片具有这种透光性的变化。其原理为:光线与氯化物的离子相互作用产生氧化物原子与电子,该类电子与银离子作用,产生银原子。银原子积聚阻碍光的穿透,使镜片变黑,其变黑的程度与光线强度成正比。
(6)定律6:完整性 该定律是指自治系统包含执行、传动、能源和操作控制四个部分。其中执行部分是直接完成系统主要功能的部分,传动部分将能源以要求的形式传递到执行部分,能源部分产生系统运行所需要的能量,操作控制部分使各部分的参数与行为按需要改变。
【例8-12】液压传动系统的组成。
液压泵是系统的能源装置,它将电能转变为液压能。液压油起传动作用,将能量传递到所需要的位置。液压缸是执行部分,它将液压能转变为机械能,并作为系统的输出,完成所规定的操作。各种控制阀(如压力控制阀、方向控制阀和流量控制阀等)是操作控制部分,控制系统协调有序地工作。
路线6-1:完整性路线(减少人的介入路线)。
最初的技术系统常常是人工过程的一种替代,这种技术系统通常只有工具部分。随着技术进化的过程,传动部分被引入,之后是能源及控制部分的引入,最后取代了人工的参与。完整性路线如图8-14所示。

图8-14 完整性路线
(7)定律7:缩短能量流路径长度 技术系统向着缩短能量流经系统路径长度的方向发展。技术系统运行的基本条件是能量能够从能源装置传递到执行装置,该路径的长度向缩短的方向进化。该定律含有两种技术进化趋势。
1)减少能量传递的级数:①减少能量形式的转换次数,如能量的路径由电能转换为机械能,再由机械能转换为热能构成,将中间环节机械能去掉;②减少参数的转换次数,如电动机输出的转速经过3级减速传递给丝杠,丝杠驱动执行机构,将3级减速变为2级减速。
2)增加能量的可控性,即将可控性较差的能量形式变为可控性较好的形式。能量控制的难易顺序为万有引力形成的势能、机械能、热能、电磁能。因此,将势能转变为机械能,将机械能转变为热能,将热能转变为电磁能是技术进化的趋势。
【例8-13】内燃机车与电动机车。
现代列车多采用柴油发动机。该类发动机首先将热能转变为机械能,之后发动机输出的速度及转矩通过传动机构传递给车轮,并带动机车运动。这种机车正在被电动机车所取代,该类机车的能源是电能,可以方便地通过控制面板控制。电动机通过简单的机械传动装置,可以使车轮获得所需要的速度与转矩。新机车无论是效率还是性能均得到提高。
(8)定律8:增加可控性 进一步增强物质-场之间的相互作用,可以增加系统的可控性。
该定律涉及的物质-场是TRIZ中的基本概念。G.S.Altshuller通过对功能的研究发现:
1)所有的功能都可分解为三个基本元件。
2)一个存在的功能必定由三个基本元件构成。
3)相互作用的三个基本元件的有机组合将产生一个功能。
组成功能的三个基本元件分别为两种物质和一种场(Two Substances and a Field)。物质可以是任何东西,如太阳、地球、轮船、飞机、计算机、水、X射线、齿轮、分子等。场是某种形式的能量,可以是核能、电能、磁能、机械能、热能等。
在TRIZ中,功能的基本描述如图8-15所示。图中F为场,S1及S2分别为物质。其意义为S1与S2之间通过场F的相互作用改变S1。

图8-15 简化的物质-场符号
组成功能的每个元件都有其特殊的角色。S1为被动元件,起被作用、被操作、被改变的角色。S2为主动元件,起工具的作用,它操作、改变或作用于被动元件S1。S2又常被称为工具。F为使能元件,它使S1与S2相互作用。
物质-场中的物质通过场相互作用,如图8-16所示。图8-16a表示物质产生场,图8-16b表示场作用于物质,图8-16c表示物质S将场F1转变为F2,F1与F2可以是相同或不同的场。

图8-16 物质与场间可能的相互作用
图8-17所示为物质-场表示的功能,可解释为人手产生的机械能(F)驱动牙刷(S2)刷牙(S1),电能(F)驱动车床(S2)车削工件(S1),或机械能(F)驱动主轴(S2)带动自定心卡盘上的工件(S1)旋转。
路线8-1:增加物质-场的复杂性。

图8-17 物质-场表示的功能
图8-18a所示为该路线。初始系统具有不完整物质-场,如图8-18b所示缺少场。首先将其进化为完整的物质-场,如图8-18c所示;之后将其进化为复杂的物质-场,如图8-18d~f所示。图8-18d、e中增加了场F2,经常起控制作用,使不可控的物质-场变得可控;图8-18f表示物质-场的串联。

图8-18 增加物质-场的复杂性路线
【例8-14】离心铸造原理。
离心铸造是目前管筒类铸件理想的生产方法。首先,在离心力的作用下,铸件内部组织非常致密;其次,由于是一次铸造成形,加工量很小,提高了铸造效率。另外,在材质的选择上,也可以最大程度地满足使用性能而不必考虑加工性能。
图8-19所示为卧式离心铸造机的铸造原理,其铸型是绕水平轴旋转的,它主要用于生产长度大于直径的套类和管类铸件。该机主要通过自动定量浇注系统,将合金液体注入旋转的管模中,同时离心机沿着轴向平稳旋转,完成离心浇注,最后经过水冷却,用牵引机将铸件脱离铸造机。
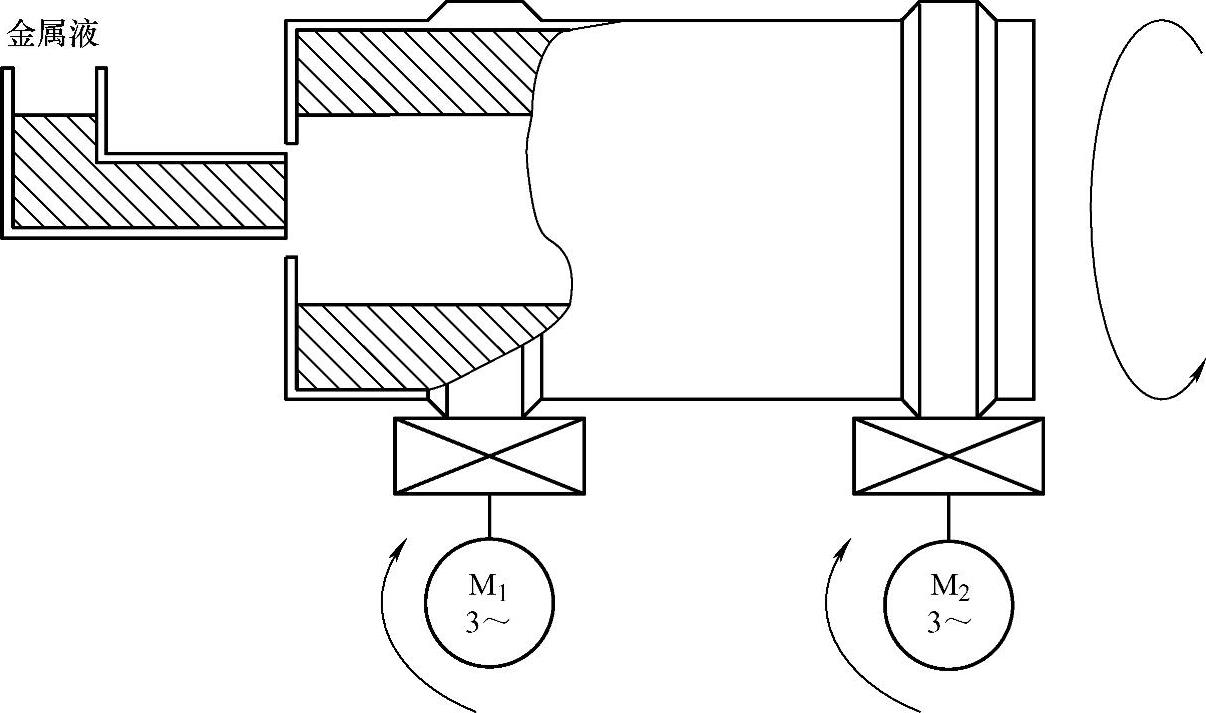
图8-19 卧式离心铸造机的铸造原理
图8-20a所示为传统铸造中模具与铸件及重力场之间的物质-场模型。该模型中模具是工具S2,铸件是物质S1,场为重力场,即在重力作用下,物质充满模具的内腔,形成工件。为了形成更高质量的铸件,提高浇注过程的可控性是基本方法之一。图8-19所示的离心铸造原理的物质-场模型如图8-20b所示。该模型是图8-20a向复杂物质-场模型的一种进化结果。
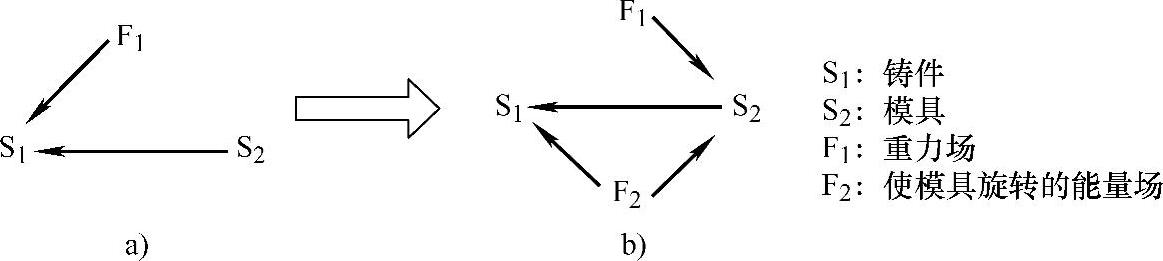
图8-20 物质-场模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。