



1.步进电动机的分类
步进电动机是一种控制系统中的执行元件,由专用驱动器供给电脉冲,其功能是将脉冲电信号变换为相应的角度或直线位移。步进电动机的位移与脉冲数成正比,转速或线速度与脉冲频率成正比,在负载能力范围内这些关系不因供电电源的电压、负载大小和环境条件的波动而变化。步进电动机能在较宽的范围内按照控制脉冲的要求通过改变脉冲频率迅速实现起动、反转、制动和无级调速等功能。步进电动机在开环控制系统中作为执行元件应用较为广泛。
按照励磁方式分类,步进电动机可分为磁阻式步进电动机、永磁式步进电动机和感应式步进电动机;按照电动机运动方式,步进电动机可分为旋转型和直线型步进电动机;按照相数分类,可分为单相、两相和三相等多相步进电动机。
2.步进电动机的工作原理
三相磁阻式步进电动机的电气接线图如图3-67所示。定子有6个极,每2个相对极绕有一相控制绕组;转子上有4个齿。齿宽与定子的极靴宽相等。当U相通电、V和W相不通电时,由于磁通具有力图走磁阻最小路径的特点,转子齿1和2的轴线与定子U极的轴线重合;当V相通电、U和W相不通电时,转子按逆时针方向旋转30°,转子齿1和2的轴线与定子V极的轴线重合;同理,当W相通电、U和V相不通电时,转子接着按逆时针方向旋转30°,转子齿1和2的轴线与定子W极的轴线重合。如此按照U-V-W-U……顺序不断给控制绕组提供励磁电流,转子就会一步一步按照逆时针方向连续转动,转子的转速取决于控制绕组的通断频率,旋转方向取决于控制绕组轮流通电的顺序,这就是步进电动机的工作原理。
步进电动机与脉冲驱动器和功率电源配套使用,步进电动机驱动器系统如图3-68所示。驱动器中的脉冲分配器将连续脉冲信号按照一定的规律通过功率放大器输入步进电动机的控制绕组,以达到控制步进电动机的转速或位移的目的。
在某些场合,为了控制转速或位移的进度,也会引入类似伺服电动机的“闭环”控制系统。
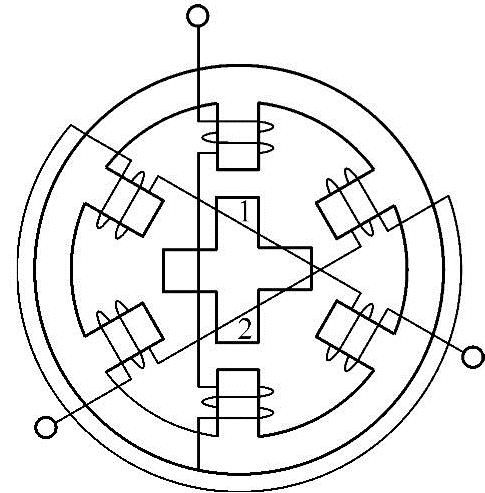
图3-67 三相磁阻式步进电动机电气接线图
3.步进电动机的基本结构
步进电动机及其控制器如图3-69所示。步进电动机和控制器通过控制线和电源线连接。为了将旋转运动转换为直线运动,步进电动机的输出轴一般制造成如图所示的“丝杠”结构。
步进电动机的基本结构包括机座、定子和转子。定子极靴上放置有励磁绕组,定子极靴和转子铁心上开有小的齿槽,转子铁心不放置绕组。定转子冲片结构如图3-70所示。
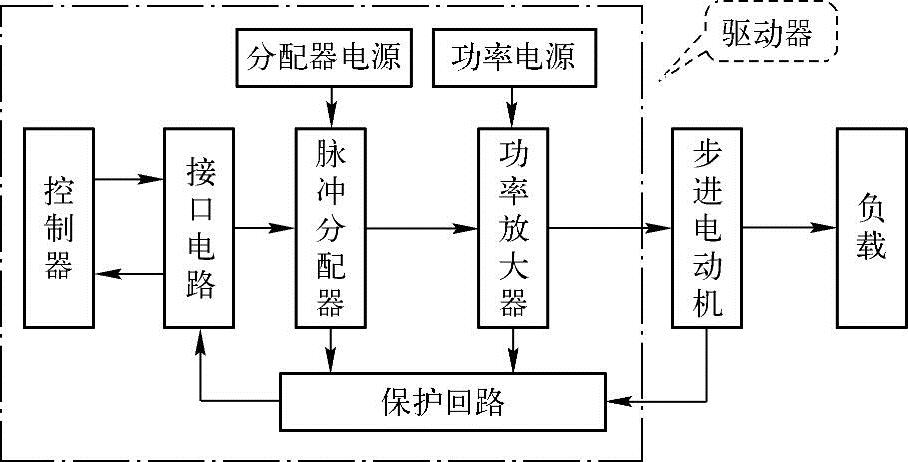
图3-68 步进电动机驱动器系统
 (https://www.xing528.com)
(https://www.xing528.com)
图3-69 步进电动机及其控制器
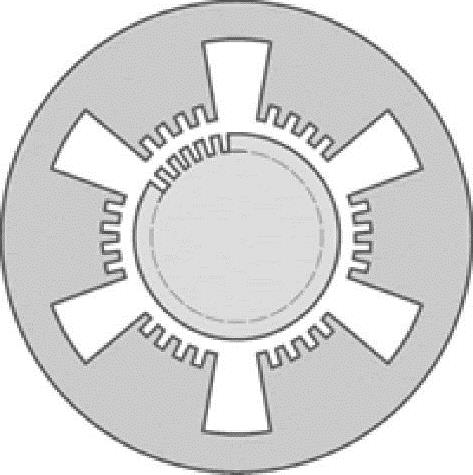
图3-70 步进电动机定转子冲片结构
4.步进电动机的定子和绕组
按照控制节拍和供电电源的相数,步进电动机的定子铁心冲制为相应数量的极靴,定子铁心实物如图3-71所示。控制绕组放置在极靴,控制绕组向步进电动机提供励磁磁通。
5.步进电动机的转子
步进电动机的转子铁心由硅钢片压制而成,铁心外圆开有均匀的齿槽,转子铁心不放置绕组。转子铁心实物如图3-72所示。

图3-71 步进电动机定子铁心实物
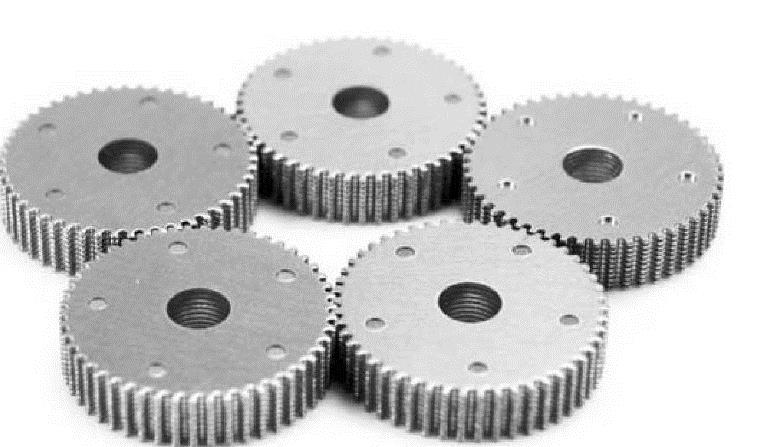
图3-72 步进电动机转子铁心实物
6.步进电动机的主要性能
步进电动机的主要参数为额定电压、额定电流、步距角、转动惯量等;主要的性能指标为最大静转矩、步距角误差、静态温升、转矩特性、运行矩频特性、起动矩频特性、起动惯频特性和升降频时间等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。