



1.伺服电动机的分类
伺服系统理论是伺服电动机分析的基础。伺服系统是按照控制命令的要求,对机械位移、机械角度、力、转矩或加速度等信号进行变换、调控和功率放大等处理的系统。电气伺服系统由伺服电动机、反馈装置、功率驱动装置和控制器四部分组成,以电动机为执行元器件和控制元器件,将电动机的机械参数作为控制对象。伺服电动机是伺服系统的中心,其性能决定着伺服系统的最终性能。伺服系统如图3-63所示。
伺服电动机可实现高精度地控制速度和位置,可将电压信号转化为转矩和转速控制信号,进而实现电动机轴上的角位移或角速度输出。伺服电动机的转速受输入信号的控制能快速反应,在自动控制系统中,作为执行元件的伺服电动机具有机电时间常数小、线性度高、始动电压低等特性。
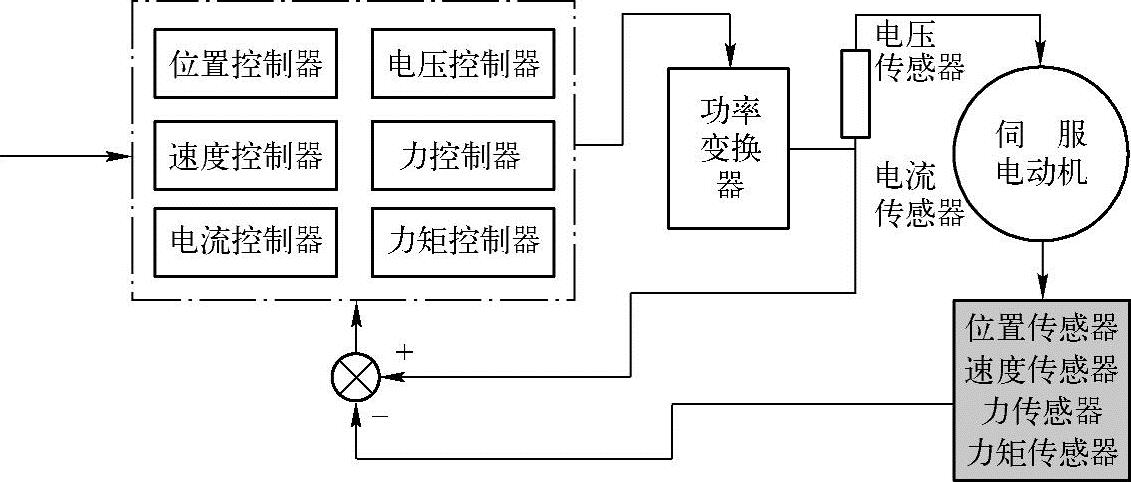
图3-63 伺服系统
伺服电动机分为直流伺服电动机和交流伺服电动机两大类。
按照电机结构,直流伺服电动机分为永磁式和电磁式两种基本结构类型,电磁式直流伺服电动机分为他励、串励、并励和复励四种;按照转子的型式,直流伺服电动机可分为常规电枢转子、空心杯形转子和无槽电枢直流伺服电动机;按照控制方式,直流伺服电动机可分为励磁电压控制和电枢电压控制方式;按照转子的结构型式,直流伺服电动机可分为有刷和无刷电动机,有刷电动机成本低,结构简单,起动转矩大,调速范围宽,控制容易,维护不方便,电磁干扰大,对环境有要求,而无刷电动机体积小,重量轻,响应快,速度高,惯量小,转动平滑,力矩稳定。
按照电机结构,交流伺服电动机也分为永磁式和电磁式两种基本结构类型。按照电气原理,交流伺服电动机可分为同步和异步电动机;按照转子的结构型式,交流伺服电动机可分为绕线转子、笼型转子和非磁性空心杯转子交流伺服电动机;按照控制方式,交流伺服电动机可分为幅值、相位和幅相控制交流伺服电动机。
2.伺服电动机的工作原理
伺服系统通过传感器将电动机的转速、转矩、位移等信号反馈至电动机的控制端,控制端通过功率变换器驱动伺服电动机,从而实现电动机的转速、转矩等信号的高精度控制。按照驱动的伺服电动机类型,下面分直流伺服电动机和交流伺服电动机来分析其工作原理。
不考虑伺服系统中的传感器、反馈装置和功率变换器,直流伺服电动机的电气原理与他励直流电机相同,其电气原理如图3-64所示,Uf为励磁电压,Uc为控制电压。忽略电枢回路电阻的影响,Uc=Ea=CenΦ,假设Uf恒定,则Uc∝n,当转速n上升时,通过“负反馈”使Uc下降,依据Uc=Ea=CenΦ,转速n随着Uc的下降而下降,该过程为直流伺服电动机实现转速高精度的控制过程。
交流伺服电动机定子的构造基本上与单相异步电动机相似,其电气原理如图3-65所示。其定子上装有两个位置互差90°的绕组,励磁绕组始终接在交流电压上;控制绕组连接着控制信号电压。当励磁绕组和控制绕组同时供电时,伺服电动机内部会产生椭圆形旋转磁场并使伺服电动机转动起来,从而实现机电能量交换。当励磁电压保持不变时,改变控制电压的大小,即可调节气隙磁动势的大小,从而实现调节电动机转速和转矩的目的。调节控制电压和励磁电压的相位,控制相位的“超前”或“滞后”即可控制伺服电动机的旋转方向。
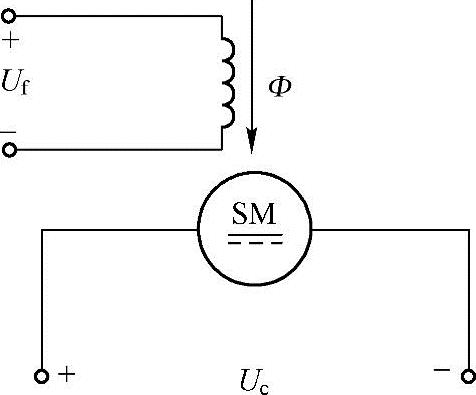
图3-64 直流伺服电动机电气原理图(https://www.xing528.com)
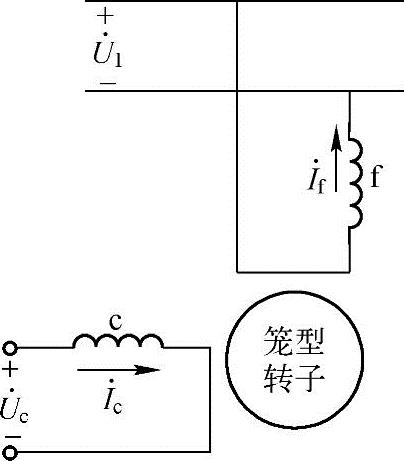
图3-65 交流伺服电动机电气原理图
3.伺服电动机的基本结构
电气伺服系统的基本结构由伺服电动机、反馈装置、功率驱动装置和控制器四部分组成,其中反馈装置包括电压传感器、电流传感器、光电编码器、磁编码器、霍尔位置传感器和温度传感器等,通常安装在伺服电动机的定子外壳或绕组中;功率驱动装置主要向伺服电动机提供主电路或控制电路所需的交流或直流驱动功率;控制器的作用是将反馈装置得到的信号经过比较、分析后输出控制信号实现对功率驱动器的控制。通常情况下,功率驱动器和控制器集成为伺服驱动器。
直流伺服电动机与他励直流电动机的结构类似,由机座或外壳、定子铁心、定子绕组、转子铁心、转子绕组、换向器或无刷器件等构成;交流伺服电动机与单相异步电动机的结构类似,由机座或外壳、定子铁心、定子绕组和铸铝转子等构成。松下伺服电动机及伺服驱动器的外形如图3-66所示。
4.伺服电动机的定子和绕组
直流伺服电动机的定子与他励直流电动机类似。交流伺服电动机的定子与单相异步电动机类似,励磁绕组和控制绕组嵌放在定子铁心中。转速、转矩和位移等传感器安装在定子上。

图3-66 松下伺服电动机及伺服驱动器的外形
5.伺服电动机的转子
直流伺服电动机的转子与他励直流电动机类似。交流伺服电动机的转子通常做成鼠笼式。为使伺服电动机具有较宽的调速范围、线性的机械特性、无“自转”现象和快速响应等性能,与普通电机相比,伺服电动机应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种:采用高电阻率导电材料做成的导条型笼型转子和采用铝合金制成的空心杯形转子。
6.伺服电动机的主要性能
伺服电动机(系统)具有调速范围宽、机械特性和调节特性为线性、无“自转”现象和快速响应四个特点,其基本参数有工作区、特征参数、稳态性能和动态性能等。驱动电动机以额定工作点表征电机的工作能力,伺服电动机则用工作区表征其基本工作特性;特征参数包括反电动势常数、转矩常数、机械时间常数、机电时间常数和电气时间常数等;稳态性能包括转速调整率、调速比、静态刚度、定位精度和稳态跟踪误差等;动态性能包括转矩波动系数、频带宽度、超调量、阶跃输入的转速响应时间、转矩变化的时间响应和变量建立时间等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。