



在稳态工作点附近,系统的状态方程可以表示为如下的形式:

针对式(6-118),可用式(6-4)那样的模型,但由于模型中采用的是“Δx”或“Δy”,干扰d或p的稳态值将为零,除非系统含有积分模态。由式(6-118)得到Δyk+1=CΔxk+1=CAΔxk+CBΔuk+CFΔfk。由于yk+1=yk+Δyk+1,可得到扩展形式的状态方程[12]
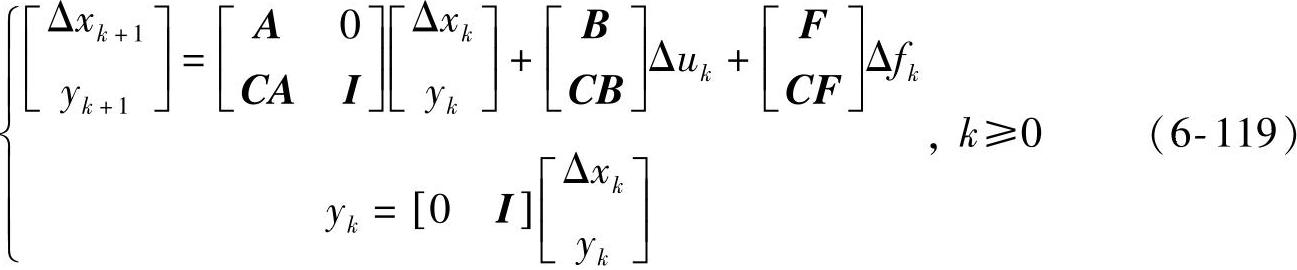
可以直接采用式(6-119)推导Kalman滤波、开环预测、稳态目标计算和动态控制,这是因为式(6-119)已经相当于在式(6-118)的基础上引入一个人工状态——尽管该人工状态是yk,但也作为待估计的状态分量。
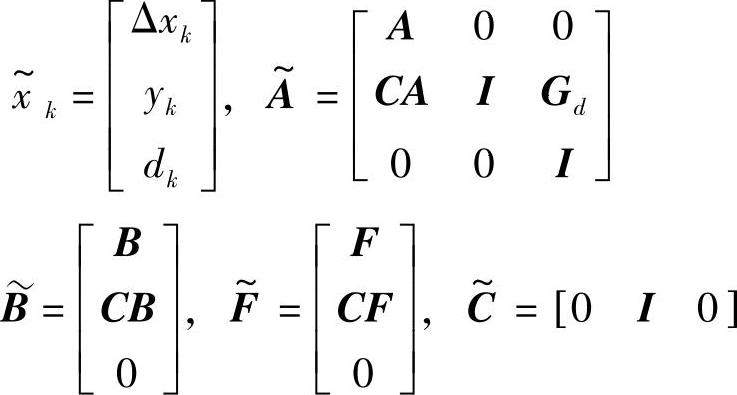
由于式(6-119)的输出方程相当于yk=yk,故不适合再引入p。不妨在式(6-119)的基础上进一步引入d,得到如下带有人工干扰的状态空间模型描述:

其中,增广的状态变量和系统矩阵为
如果如下的秩条件满足:
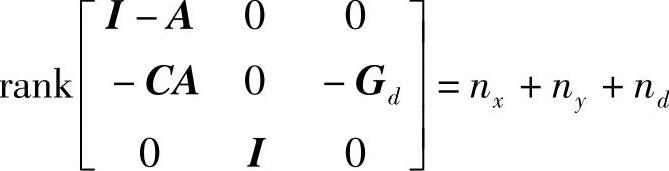
则可以采用式(6-120)推导Kalman滤波、开环预测、稳态目标计算和动态控制。
采用式(6-15)形式的Kalman滤波器,采用式(6-119)或者式(6-120)形式的状态空间模型,实际的闭环控制作用为式(6-98)。未来状态估计的开环预测值如下:
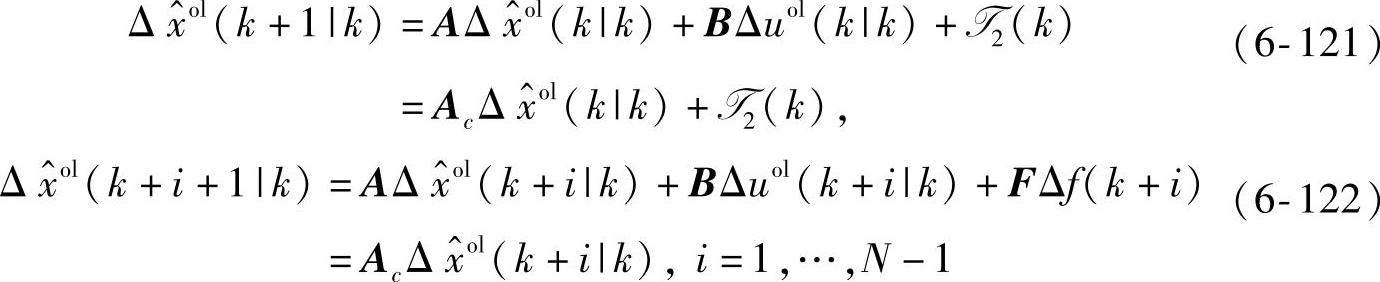
其中
 (https://www.xing528.com)
(https://www.xing528.com)
预测初值 。基于式(6-121)和式(6-122),未来输出和输入的开环预测值如下:
。基于式(6-121)和式(6-122),未来输出和输入的开环预测值如下:

基于式(6-121)~式(6-124),得到开环稳态方程如下:

故继续的SSTC同6.3节。根据式(6-125)~式(6-127),在SSTC中,要得到 ,满足
,满足
由式(6-129)减式(6-126)得到式(6-35),由式(6-130)减式(6-127)得到式(6-36)。
输出的闭环预测值如下:

用式(6-131)减式(6-121)、式(6-132)减式(6-122)得式(6-116)。由式(6-116)迭代得式(6-117)。由式(6-133)、式(6-117)、式(6-123)得式(6-77)。将式(6-117)代入式(6-98)得式(6-85)。由式(6-85)得式(6-86),故继续的动态控制模块同6.4节。
例6.2 系统模型、模型失配和控制器参数见算例6.1。但是N=20,Nc=15。在k∈[62,76]时,出现值为feq+[0.6;-0.6]的干扰;k≥120时,出现值为feq+[-0.8;0.8]的干扰。控制结果见图6-2。
值得指出,在6.5.2节的算法中,由于采用增量模型,不管是否有模型失配,d的稳态值应该为零。
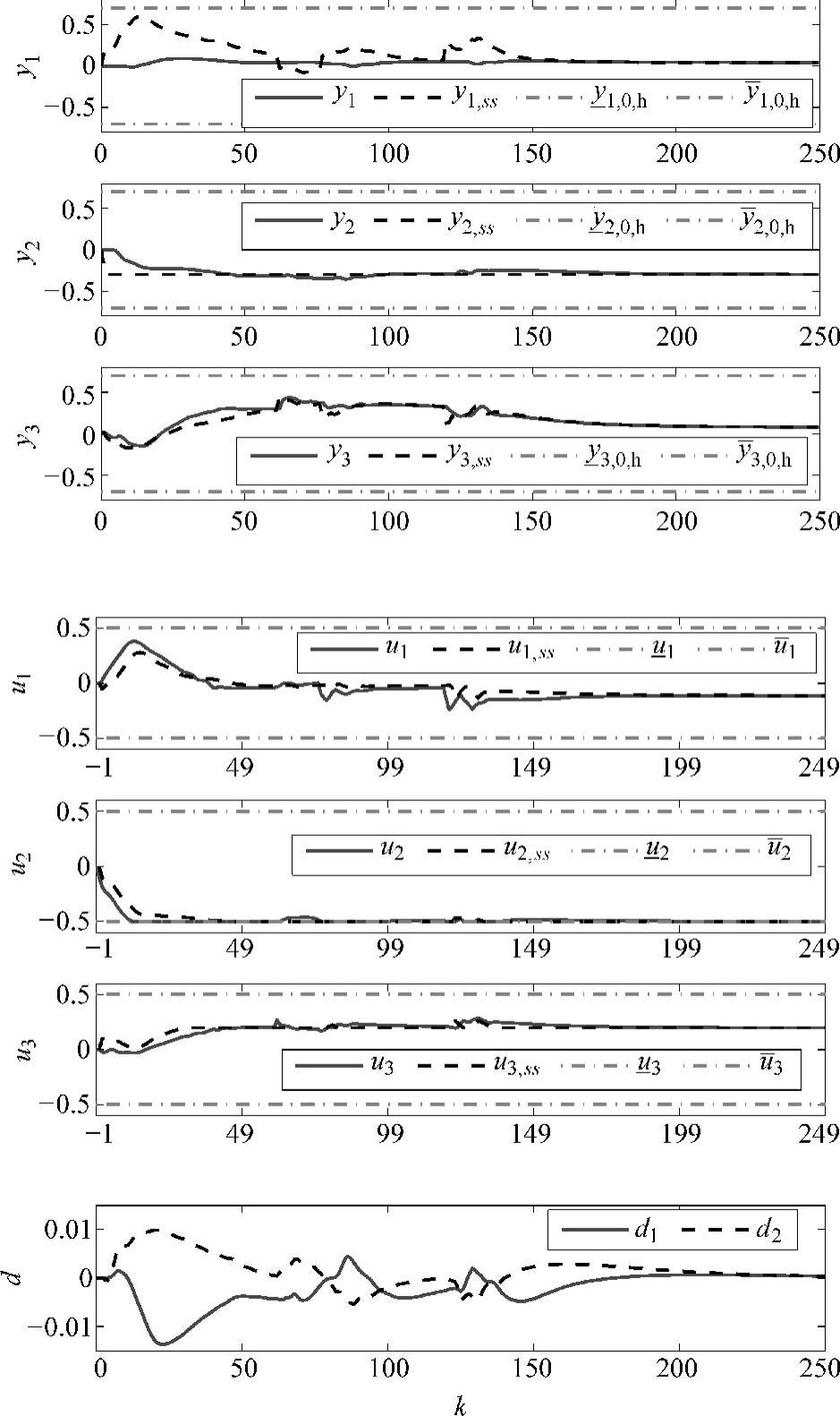
图6-2 控制效果图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。