



取控制时域为Nc,因此Δv(k+i|k)=0,∀i≥Nc。基于Kalman预报方法,在当前和未来控制作用的影响下,输出的预测值如下:
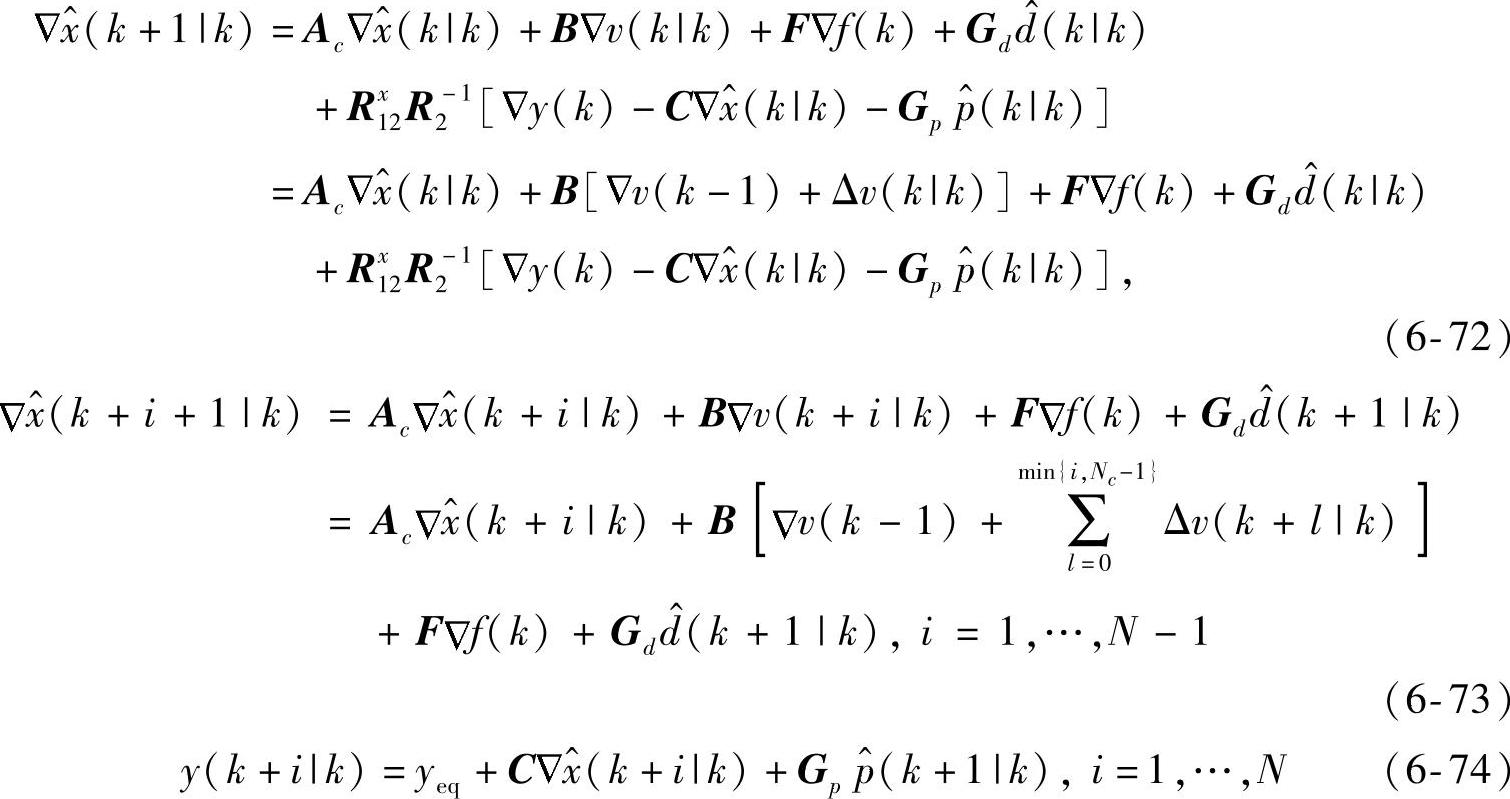
由式(6-72)减式(6-18)、式(6-73)减式(6-21)得

采用式(6-75)迭代得到

利用式{(6-74),(6-76),(6-22)}得到

式(6-77)为闭环预测方程。
在动态控制中,假设要达到3个目的:①未来的输出尽量接近yss(k);②抑制控制摄动的剧烈变化;③不可行时,通过放松输出软约束得到可行解。选择最小化如下的目标函数:
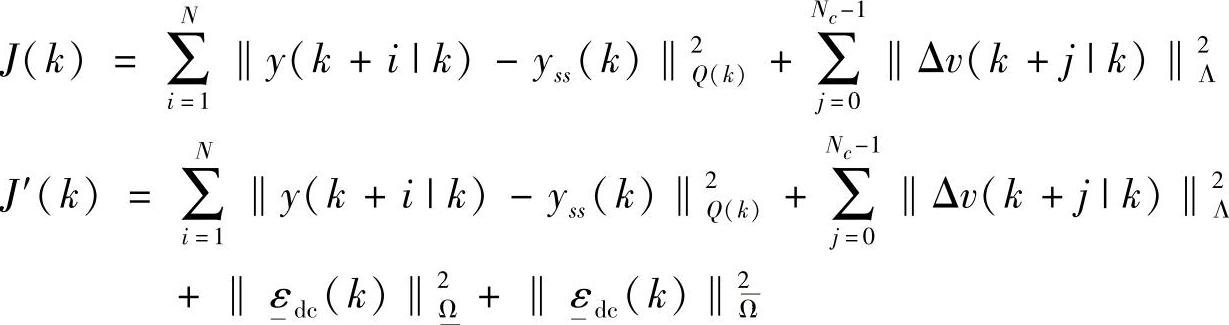
其中, 和
和 为输出约束松弛量。目标函数中的加权
为输出约束松弛量。目标函数中的加权 同第4章(此处略)。
同第4章(此处略)。
在动态控制中,通常考虑如下一些不等式约束(MV变化速率约束、MV幅值约束、CV幅值约束、松弛变量约束):
其中
需要把以上约束式(6-78)~式(6-81)统一表示为关于Δv(k+l|k)(l=1,…,Nc)的约束。由式(6-17)得到

其中后一个等式用到了

和 。将式(6-76)代入式(6-17),并结合式(6-84)得到
。将式(6-76)代入式(6-17),并结合式(6-84)得到
利用式(6-85)得到
定义
不同于对yss(k)的跟踪,对δvss(k)的跟踪通过在动态控制优化问题中加入如下的约束来实现:

其中,L=[II…I]。
总之,在每个时刻k,首先求解优化问题
 ,s.t.式(6-78)~式(6-80),式(6-87) (6-88)
,s.t.式(6-78)~式(6-80),式(6-87) (6-88)
如果式(6-88)不可行,则进一步求解
 ,s.t.式(6-78)~式(6-79),式(6-81)~式(6-83),式(6-87) (6-89)
,s.t.式(6-78)~式(6-79),式(6-81)~式(6-83),式(6-87) (6-89)
在求解以上两个优化问题时,将式(6-85)、式(6-86)、式(6-77)代入式(6-78)~式(6-81)。
优化问题式(6-88)~式(6-89)都可以采用标准的二次规划求解工具求解。由所得的解 ,将
,将 送入实际被控系统。当然,由于执行结构的不准确性等原因,可能u(k)≠u(k|k)。
送入实际被控系统。当然,由于执行结构的不准确性等原因,可能u(k)≠u(k|k)。
注解6.2 求Ac的高次幂可能导致数值计算问题,见参考文献[73](第34页)。有的文献中,为了避免求A的幂,直接将输出或者状态预测值也当作决策变量[40]。对本节方法,即采用
 ,将该预测方程作为约束,将
,将该预测方程作为约束,将 和
和 v(k+i|k)都作为决策变量。
v(k+i|k)都作为决策变量。
注解6.3 在目标函数中采用控制作用增量(此处为控制摄动增量),有利于消除CV余差,但实际上SSTC才是消除CV余差的关键[25]。在双层MPC中,更重视消除CV跟踪稳态目标的余差。由于MV在大多数时候是PID控制器的设定值,其跟踪稳态目标的重要性低于CV的跟踪。
注解6.4 了解优化问题式(6-88)在去掉所有约束后的解析解是非常重要的。一般要求这个解析解存在且唯一,这等价于要求最小二乘问题的Hessian矩阵正定。假设Hessian矩阵可以表示成2(GTyQGy+R)(其中Q和R分别由CV和控制摄动的加权系数组成),则取Q≥0,R>0将确保Hessian矩阵正定。
例6.1 采用第3章提供的重油分馏塔模型,在平衡点附近,其连续时间传递函数矩阵如下:(https://www.xing528.com)

采样周期为4。采用第8章的开环子空间辨识方法得到状态空间模型,nx=20。取yeq=0、ueq=0和feq=0。In表示n阶单位矩阵。
取
 ,
, ;
; ,
, ,
,
 ,
, ,
, ,
, ,
, ,其中,y1,ss、y2,ss、u3,ss具有外部目标并且其ETrange均为0.5。取R1=I23,R12的所有元素为0.1,R2=3I3,由式(6-16)得到L。取QLQR=I20,RLQR=I3,求解离散Riccati方程如下:
,其中,y1,ss、y2,ss、u3,ss具有外部目标并且其ETrange均为0.5。取R1=I23,R12的所有元素为0.1,R2=3I3,由式(6-16)得到L。取QLQR=I20,RLQR=I3,求解离散Riccati方程如下:
PLQR=QLQR+ATPLQRA-ATPLQRB(RLQR+BTPLQRB)-1BTPLQRA
并计算K=-(RLQR+BTPLQRB)-1BTPLQRA。Gd=[I2,0]T和Gp=[1,0,0]T。
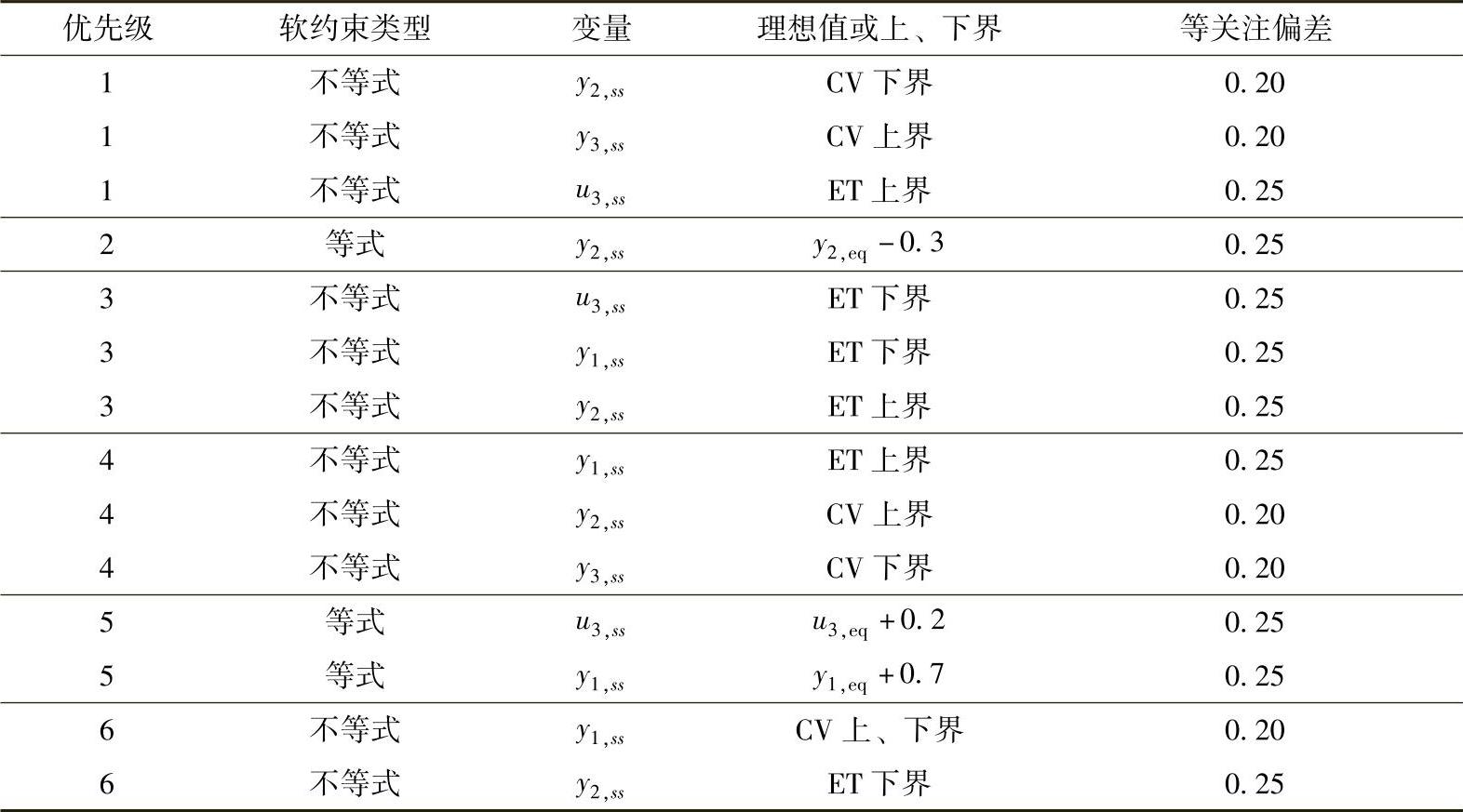
SSTC可行性阶段的相关参数设置见表6-1。取h=[-2,-1,2],无最小动作变量,Jmin=-0.4。在k∈[62,76]时,出现值为feq+[0.2;-0.1]的干扰;k≥120时,出现值为feq+[1;-1]的干扰。其他时段内干扰为feq。YolN(0|0)=[yeq;…;yeq]。 ,u(-1)=ueq,y(0)=yeq。
,u(-1)=ueq,y(0)=yeq。
表6-1 多优先级SSTC参数选取
动态控制器各参数选择如下:N=15,Nc=8,Λ=diag{3,5,3},
 ,
, ,
, =2.0,
=2.0, ,
, =2.0;
=2.0; =2.0,
=2.0, ,
, ;
; =2.5,
=2.5, ,
, ,ρ=0.2。u(k)=u(k|k)。真实被控
,ρ=0.2。u(k)=u(k|k)。真实被控
对象为Ar=0.9A,Br=0.9B,Cr=0.9C,Fr=0.9F。
下面采用线性规划,给出SSTC的所有优化问题,其中为方便没有对每个优先级的约束进行完全简化。
优先级1:
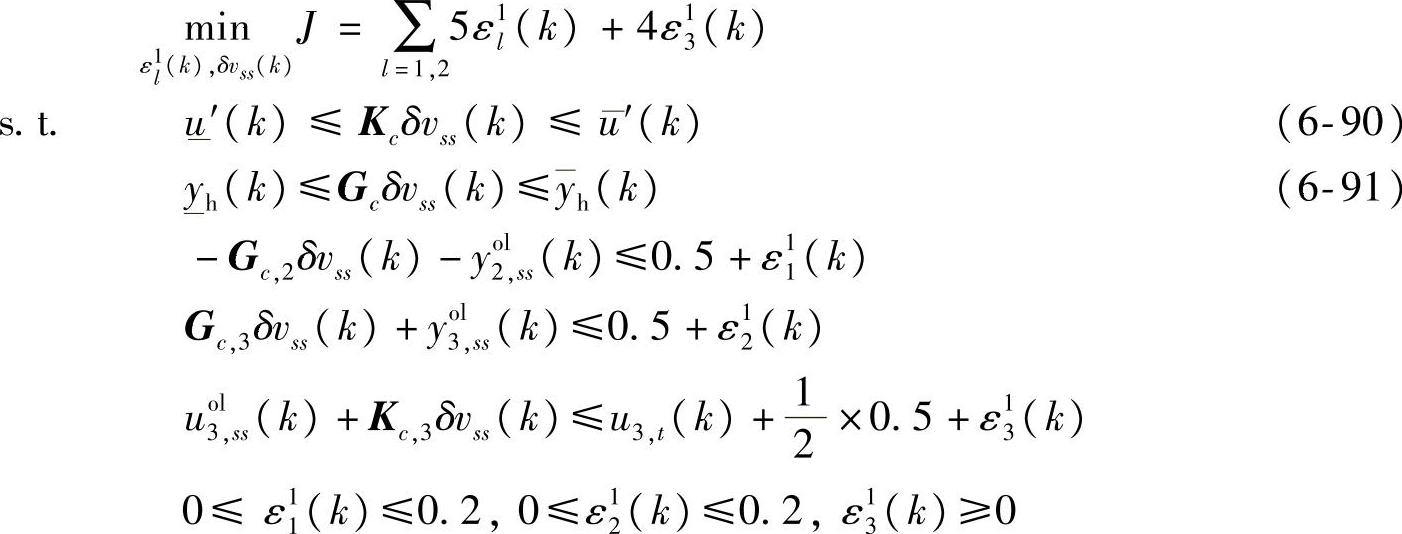
优先级2:

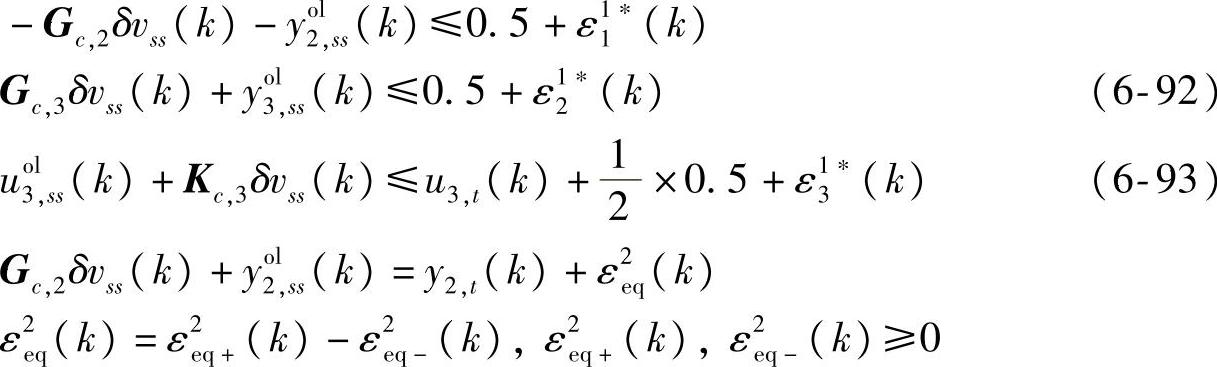
优先级3:

s.t.式(6-90)~式(6-93)
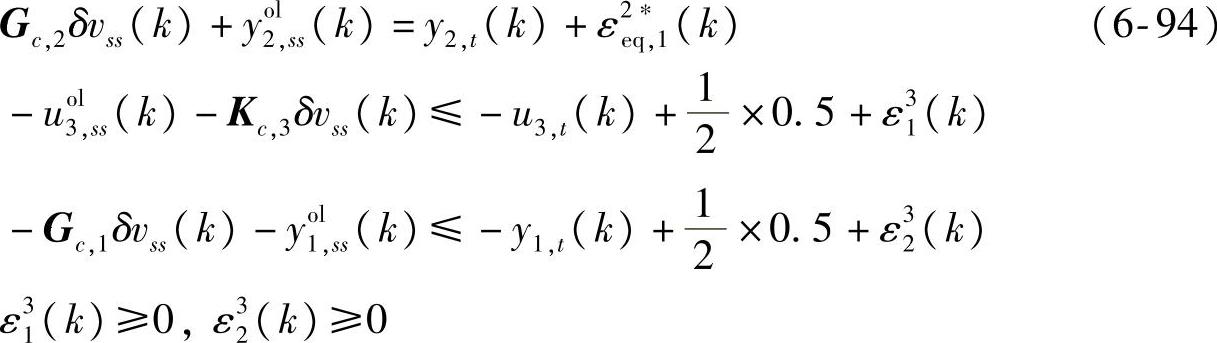
优先级4:

s.t.式(6-90)~式(6-94)
优先级5:

s.t.式(6-90)~式(6-96)

经济优化阶段:

s.t.式(6-90)~式(6-92),式(6-94),式(6-97)

SSTC可行性阶段采用LP,经济优化阶段采用QP,动态控制结果见图6-1。
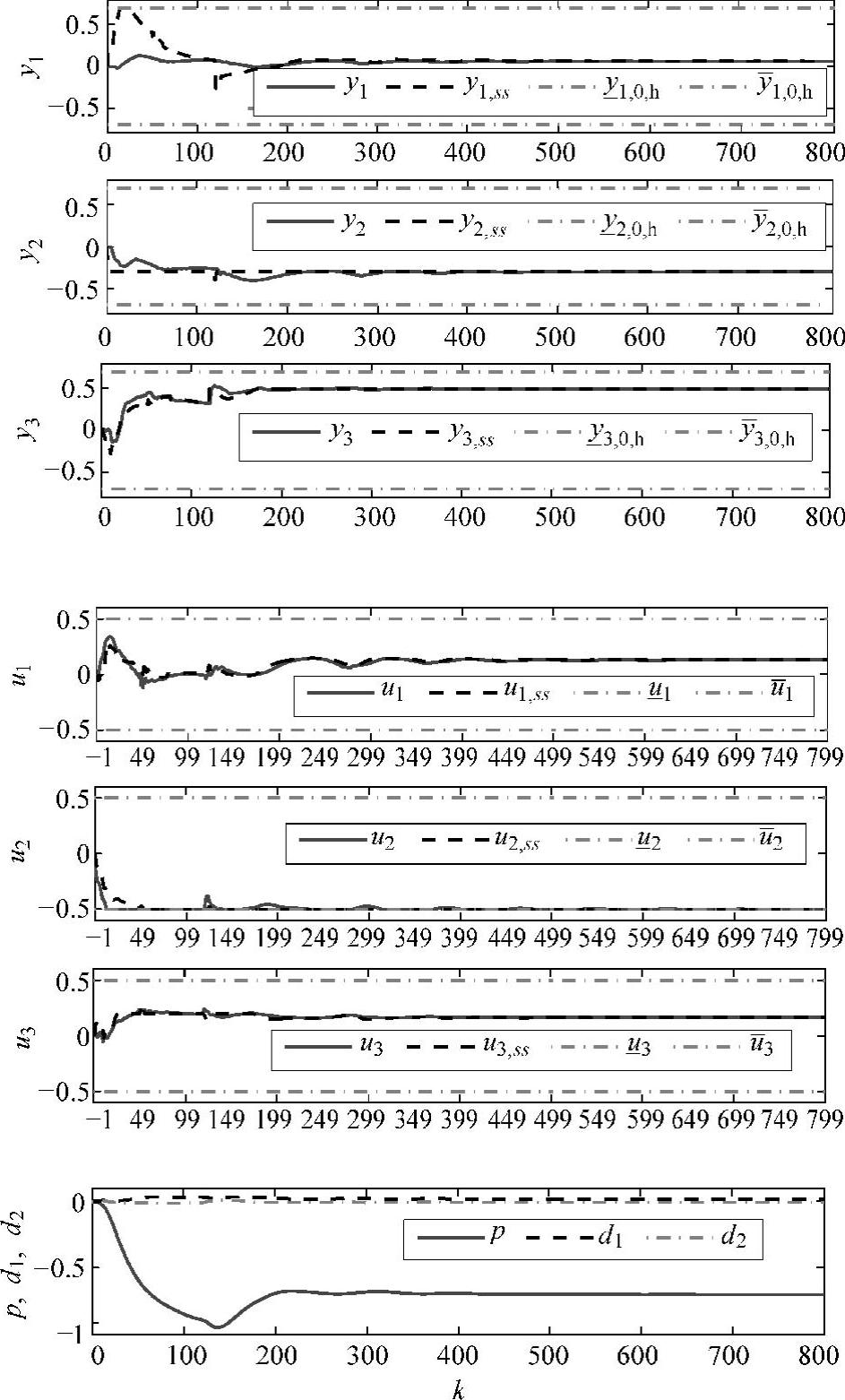
图6-1 控制效果图
注意在本算例中,取任意其他合适的平衡点[不需满足(I-A)xeq=Bueq+Ffeq和yeq=Cxeq]时,本章算法仍然可行。如果没有模型失配,且满足(I-A)xeq=Bueq+Ffeq和yeq=Cxeq,则平衡点的任意移动仅影响仿真中各变量的绝对数值,不影响相对值(曲线形状)。这些结果已经得到仿真验证,此处略。
另外,在本例中,如果将A替换为1.15A(即模型开环不稳定,有单位圆外特征值),而真实对象与模型一致,则适当调整参数后,系统仍可以镇定。经过一系列仿真,总结如下:系统可以不稳定,模型可以不准确。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。