



一般工业过程的输入输出结构如图1-1所示。工业过程的输入通常可分为两类,一类是可控输入(控制输入),也称为操作变量(Manipulated Variable,MV);另一类是不可控输入,即干扰变量(Disturbance Variable,DV),包含可测干扰和不可测干扰。动态控制的目的就是克服DV的影响,并使被控变量(Controlled Var-iable,CV)具有期望的动态特性。对于可测DV,在其到CV的模型已知的前提下即可通过前馈加以补偿,故可测DV有时也称为前馈变量(FeedForward variable,FF)。但是,对于不可测DV,只有其作用到被控过程并反映出来后,才能通过反馈方式抑制其影响。
变量选择就是确定MV、DV和CV。
典型的MV包括回流流量、再沸器流量或热负荷、压缩机转速等。MV通常为常规底层控制回路(PID为主)的设定值,如果过程动态过于缓慢,则可使用阀位作为MV,但要考虑阀的非线性问题。MV的数量受限于实际系统的可自动调节的阀门等执行机构的数量。
典型的DV包括进料流量、进料温度、进料组分等。要尽量将所有的可测DV都包含在控制器设计中,即便它们在另一单元或DCS系统。
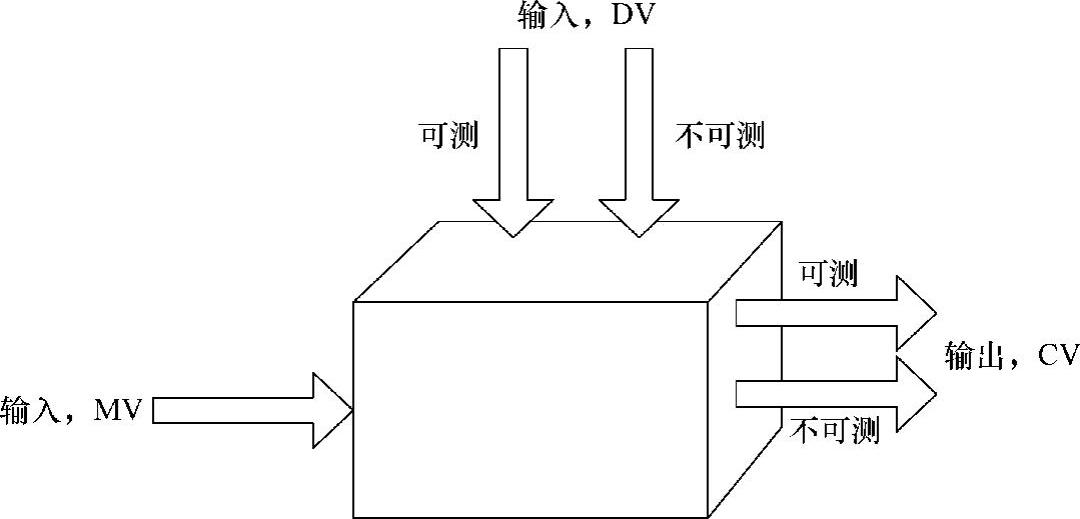
图1-1 工业过程的输入输出结构
典型的CV包括流量、液位、温度、压力、成分等。对同一个变量,其真实值可以作为CV,而其PID设定值可以作为MV,该PID对应的阀门开度也可以作为CV。MPC中某些CV可能没有跟踪设定值的要求,只要处于一定的范围内即可。CV分可测与不可测两种,本书仅考虑可测CV,不可测CV的处理可能涉及软测量等技术。通常,CV的个数不等于MV。(https://www.xing528.com)
若系统进入稳态后,对输入做一阶跃变化,某CV在一段时间后重新进入到新的稳态,则称此CV为稳定(Stable)CV。若系统进入稳态后,对输入做一阶跃变化,某CV经过一段时间后保持匀速上升或匀速下降,则称此CV为斜坡(Ramp)变量或者积分CV。在MPC的工程实现中,一般可设定积分CV与所有输入之间呈现积分特性。
如果一个变量不受被控过程中其他变量的影响,则称其为独立变量(Inde-pendent Variable,IndepV),反之称为依赖变量(Dependent Variable,DepV)。故IndepV的任何改变都来自被控过程之外,如由控制器改变MV、人扳动阀门等。MV和DV都是IndepV,而CV一定是DepV。IndepV不限于MV和DV,DepV也不限于CV。不可能所有的IndepV都作为MV和DV,更不可能所有的DepV都作为CV。对一个实际工业过程,MV、DV、CV的选择要兼顾操作的平稳性、安全性及经济效益的优化等,故是一个复杂的问题,就像医生诊断病情一样,不可能有统一的定律。
以一个分馏塔顶温度、回流流量组成的环节为例。可以选择回流液阀门开度作为MV,而回流流量和塔顶温度为CV。如果采用了PID控制回流流量,则可以选择回流流量PID的设定值作为MV,而回流流量和塔顶温度及阀门开度都可作为CV。如果采用了串级PID控制塔顶温度,温度PID为主回路、流量PID为副回路,则可以选择塔顶温度PID的设定值为MV,而回流流量和塔顶温度及阀门开度都可作为CV。这些就像医生采用了不同的治疗方案一样,药方也会随之不同。
在具体的预测控制工程实现中,移除一些原有的组态、增加一些原来没有的底层控制组态、重新整定PID控制回路等,都是可能需要做的工作。这些工作的主要作用是使预测控制的被控系统呈现更“容易控制”的动态特性(如线性特性)。这些工作与控制算法的功能(是否有积分处理、是否有非线性变换)、模型辨识方法、控制结构选择、具体工艺流程(响应速度、安全性)等都有关系,是个无限可延伸探讨的话题。
对于具体的系统模型,输入通常指IndepV,输出通常指DepV,比如:多变量系统指多于一个IndepV和/或多于一个DepV的系统;多入多出系统表示多于一个IndepV、多于一个DepV的系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。