



(1)动作及有效的方向
1)动作。图8-7所示为Output Cam开通及关断的行为。
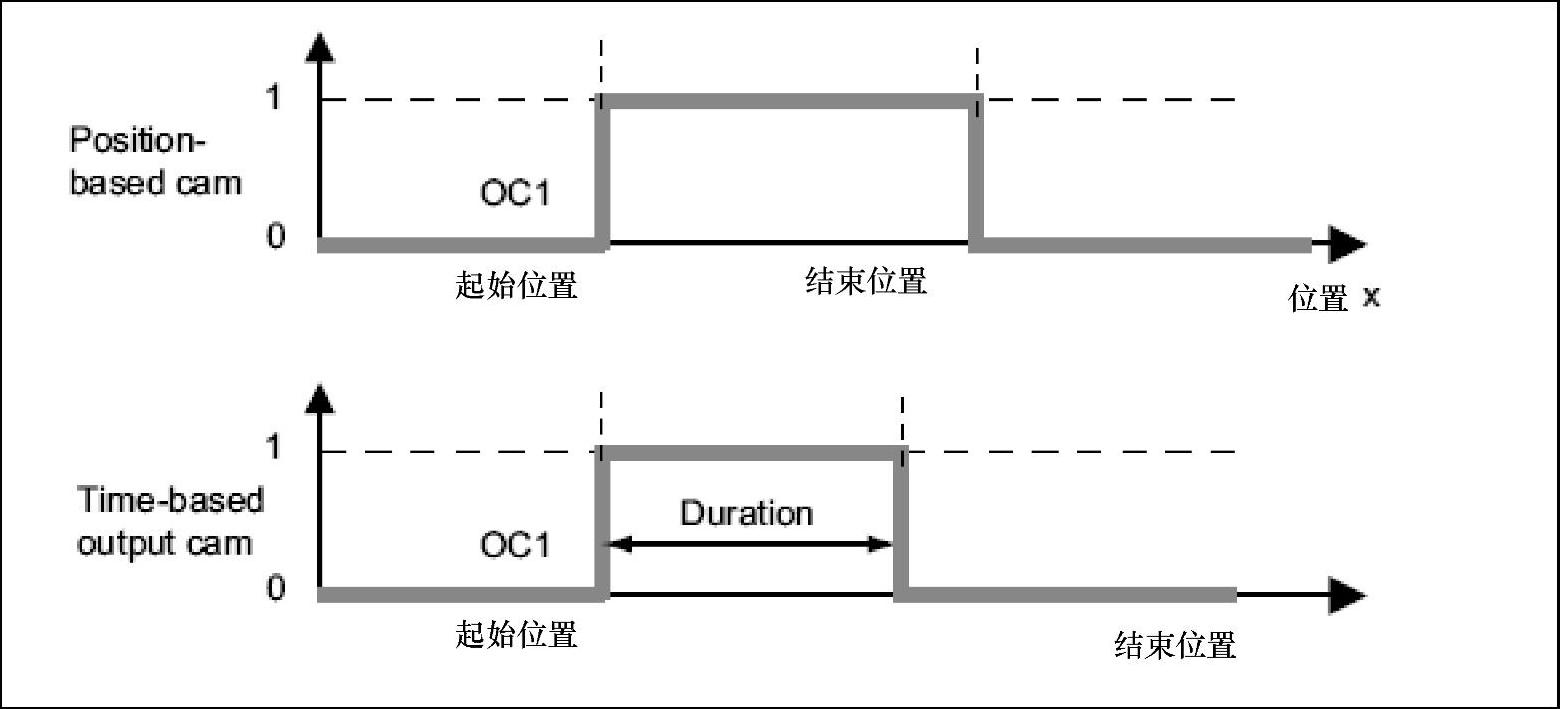
图8-7 Output Cam开通及关断的行为
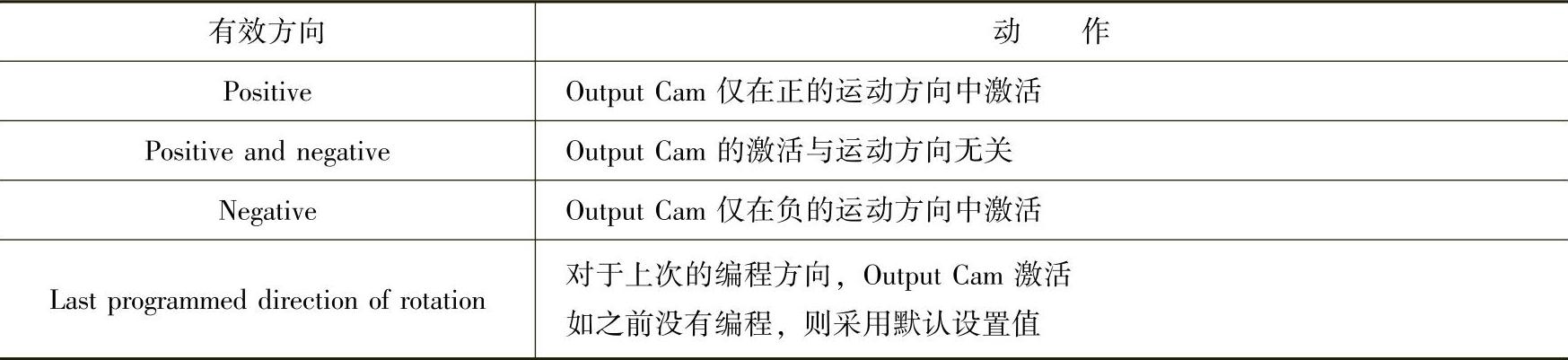
2)有效的方向。当激活Output Cam时可定义一个默认的有效方向。当运动方向与有效方向一致时,Output Cam才开通。具体说明见表8-3。
(2)滞后(Hysteresis)
表8-3 有效方向及动作说明
如果因机械影响,造成实际位置有变化时,可指定滞后值以防止Output Cam输出状态不正常。下面举一个基于位置的Cam滞后实例。
设Output Cam类型为基于位置的Cam,开通位置为20 mm,关断位置为200 mm,滞后20mm;有效方向为正向。轴运行位置为0mm→100mm→10mm→50mm→0mm→150mm→0mm。Output Cam开通情况如图8-8所示。
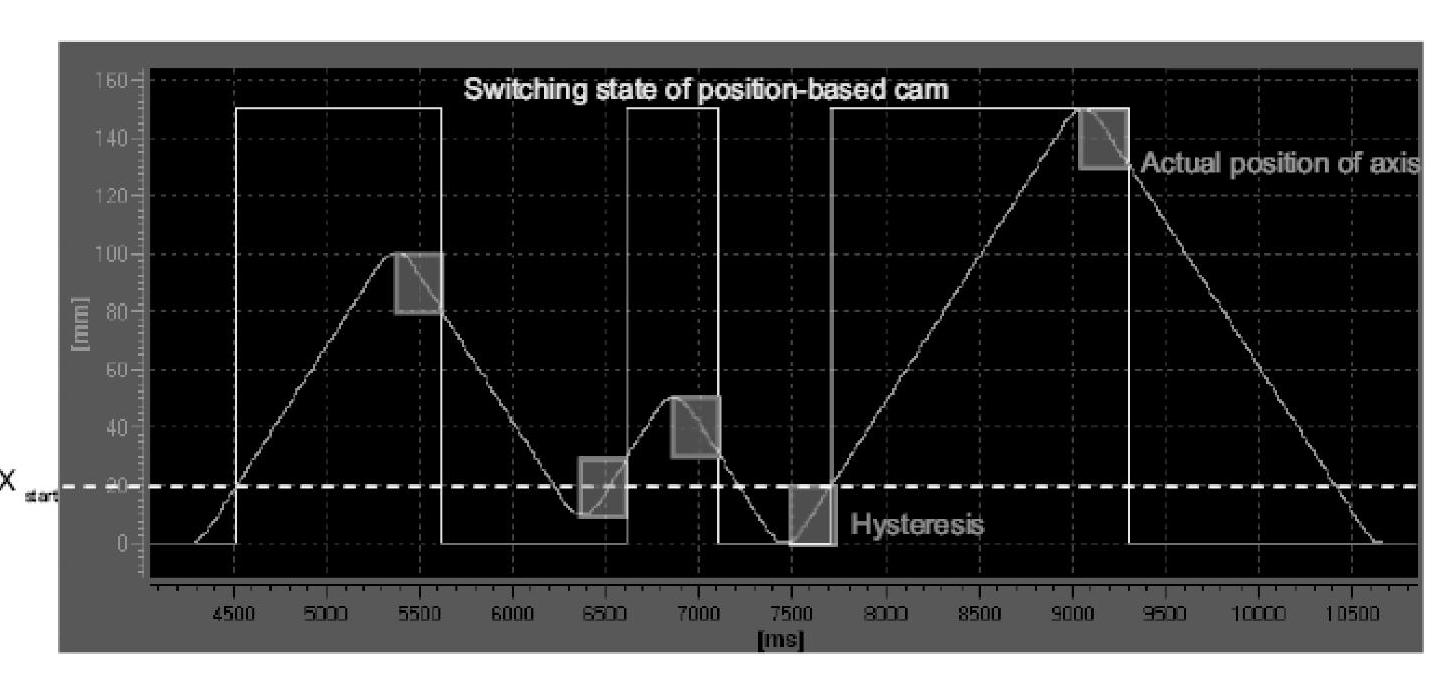
图8-8 滞后范围及基于位置正方向有效的Cam行为
对于直线轴滞后范围的上限设置为工作范围的25%,而对于旋转轴设置为旋转轴范围的25%。如果背离这个最大设置,则会出现错误信息。在实际应用中,一般情况下滞后范围的设置值较低。
基于路径控制的Output Cam,当监测到方向反向时滞后有效。如果对于Output Cam仅设置正方向或负方向有效时,则在没有离开滞后范围时若运动反向,Output Cam不会关断。
基于时间的Output Cam的开关行为由开通周期时间决定,而不是由滞后决定。也就是说输入的滞后范围不影响Output Cam的开通周期,仅与开通时间有关。(https://www.xing528.com)
(3)开通/关断补偿时间
对于数字量输出的开通时间及连接的开关元件传播延时的补偿,可以指定开通/关断补偿时间。补偿时间来自于总的延时时间,并且可以单独设置开通沿的补偿时间(激活时间)或关断沿的补偿时间。
Output Cam的开通/关断可根据实际速度进行动态补偿。下面以一个具体实例来进行说明。一个阀应该在轴位置200°时打开,激活时间为0.5s。由于要对阀的开通延时做补偿,所以如果轴的运行速度为10°/min时,则必须在轴位置195°时打开阀;而当轴的运行速度为20°/min时,则必须在轴位置190°时打开阀。这种阀的动态开通补偿可通过Output Cam工艺对象自动完成。
对于Output Cam的开通关闭的时间补偿需注意下述问题:
1)Output Cam的输出时间与动态调整的计算相关。
2)在补偿时间中考虑了死区时间,如PROFIBUS DP通信时间、数字量输出的输出延迟时间等。
3)设置长的补偿时间如果超出一个模态周期,将会造成实际值Output Cam开关位置的严重波动。所以,设定的补偿时间应小于一个模态周期。
(4)逻辑操作
通过对LogAdress.logicOperation配置数据的设置,可以指定连接至输出点的Output Cam使用“与”或“或”的操作,图8-9所示为两个Output Cam的或操作示例。
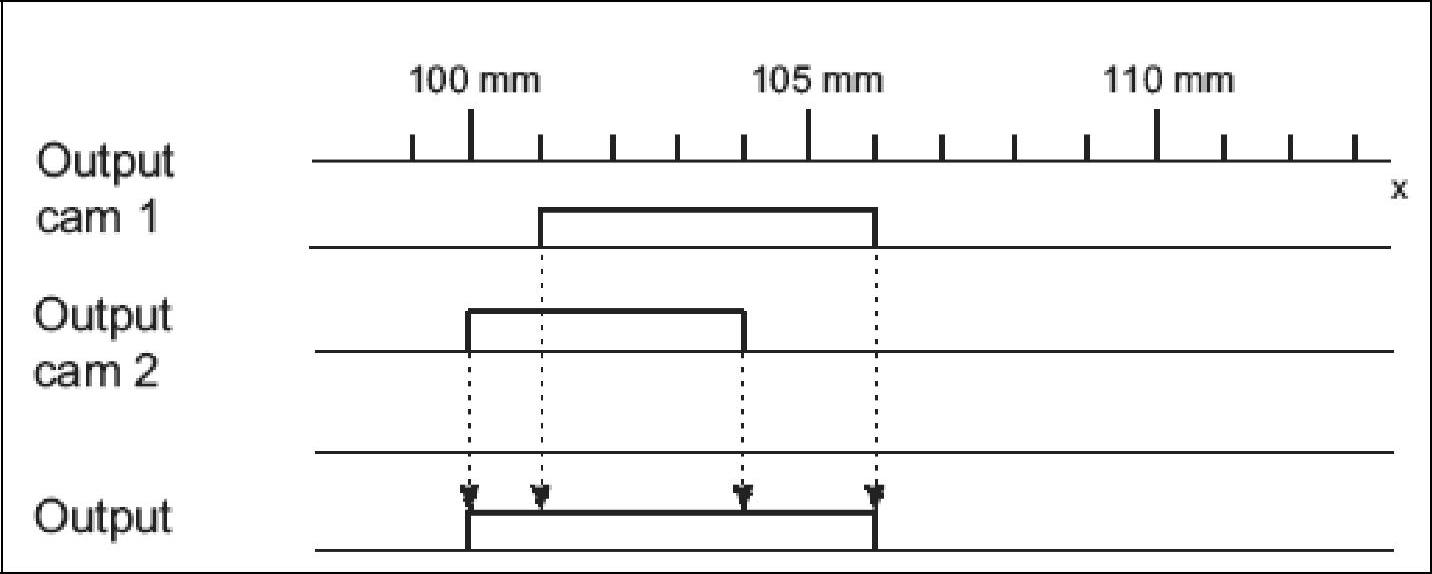
图8-9 两个Output Cam的或操作
(5)模拟仿真
通过仿真命令可对Output Cam进行仿真运行,Output Cam的状态不在硬件中输出。在仿真模式下,硬件Cam的行为与软件Cam相同。如果将一个激活的Output Cam切换至仿真模式(_enableOutputCamSimulation),Output Cam的状态仍保持。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。