



【摘要】:在使用速度同步时,轴TO与同步操作TO的配置与6.4.1节相同。程序可以使用MCC、ST、LAD等不同的语言编写,虽然所调用的功能块名称和显示形式略有不同,但其功能都是类似的。下面以MCC和ST语言为例,介绍速度同步程序的编写。图6-22 Velocity Gearing On编程ST编程时,调用_enableVelocityGearing()功能块,程序如下:解除速度同步时,在MCC中调用Velocity Gearing Off功能块,如图6-23所示。
在使用速度同步时,轴TO与同步操作TO的配置与6.4.1节相同。
速度同步功能的编程与齿轮同步功能类似,使用速度同步时,会用到以下参数:
(1)速度比
速度比可通过浮点数指定。
(2)同步方向
1)POSITIVE:主值与从轴按相同方向运行;
2)NEGATIVE:主值与从轴按相反方向运行。
程序可以使用MCC、ST、LAD等不同的语言编写,虽然所调用的功能块名称和显示形式略有不同,但其功能都是类似的。下面以MCC和ST语言为例,介绍速度同步程序的编写。
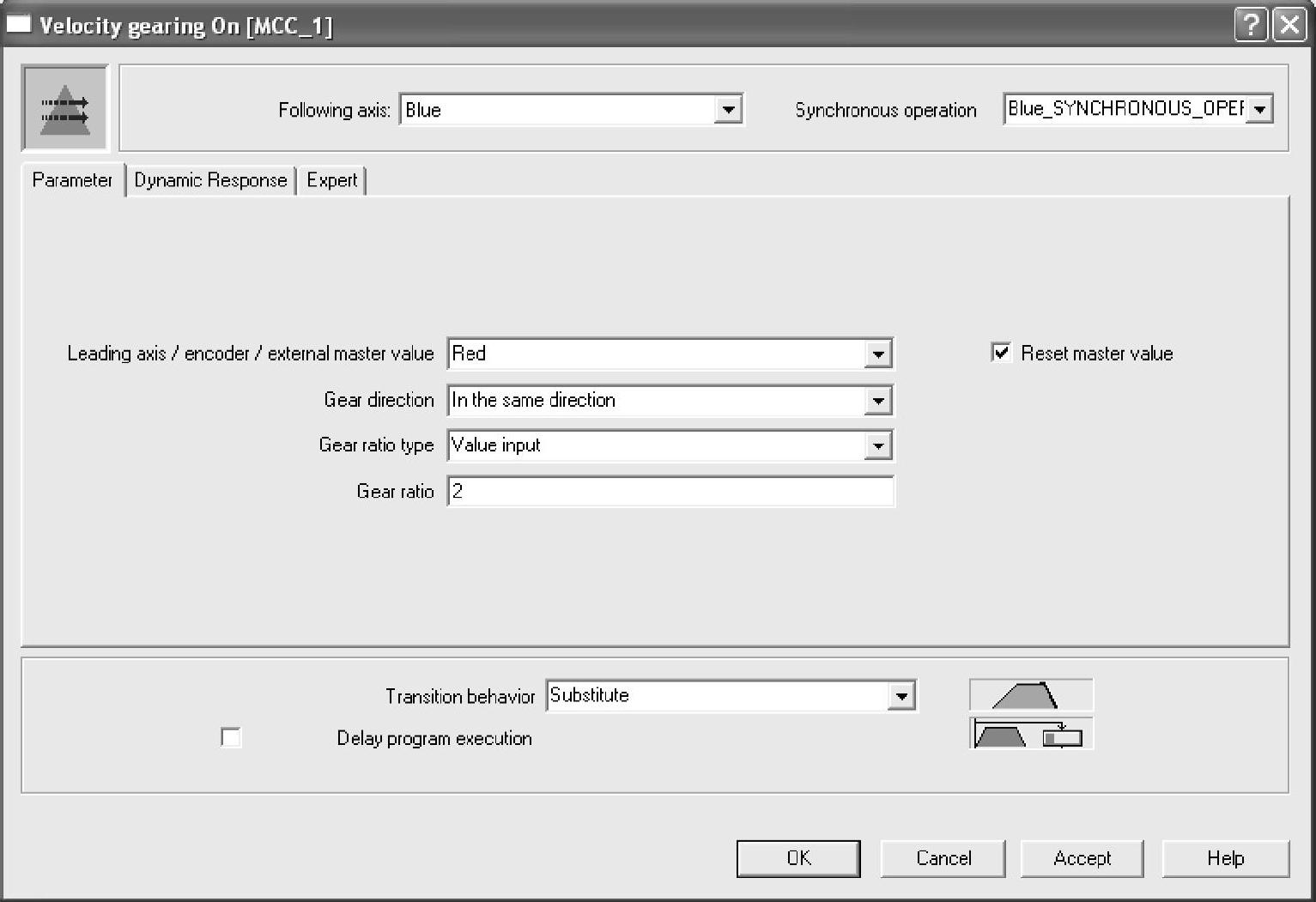
本例中采用正向速度同步,速度比为2。建立速度同步时,在MCC中调用Velocity Gearing On功能块,如图6-22所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-22 Velocity Gearing On编程
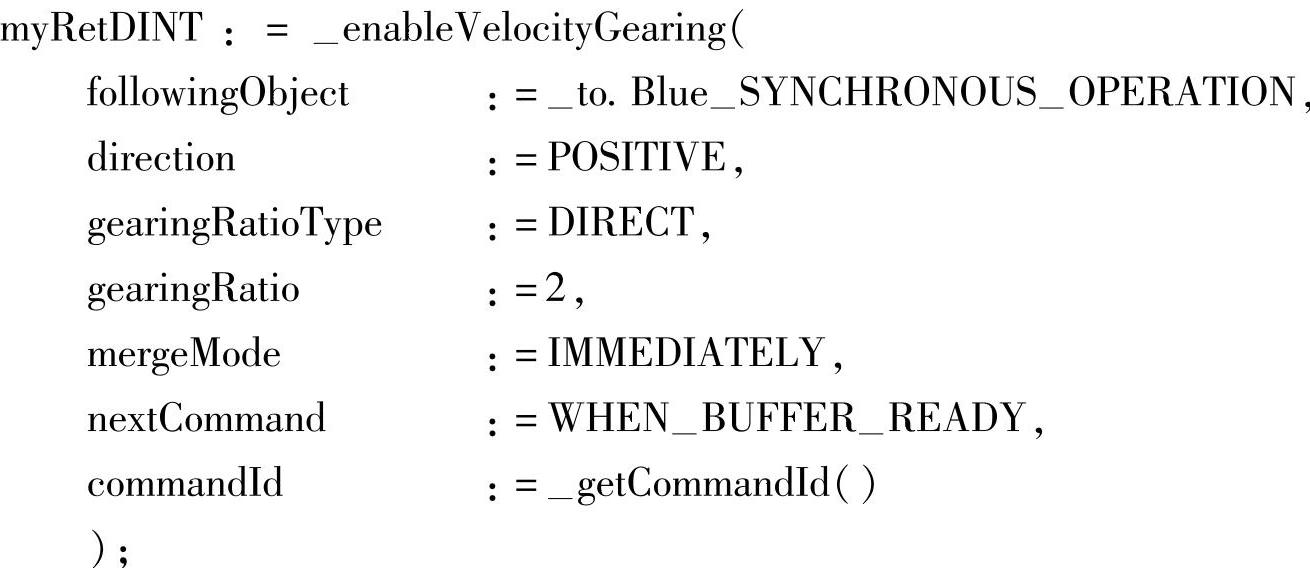
ST编程时,调用_enableVelocityGearing()功能块,程序如下:
解除速度同步时,在MCC中调用Velocity Gearing Off功能块,如图6-23所示。
注意,Velocity Gearing在同步过程中的动态响应是在指令直接给定的,本例中采用了默认值。
ST编程时,调用_disableVelocityGearing()功能块,程序如下:
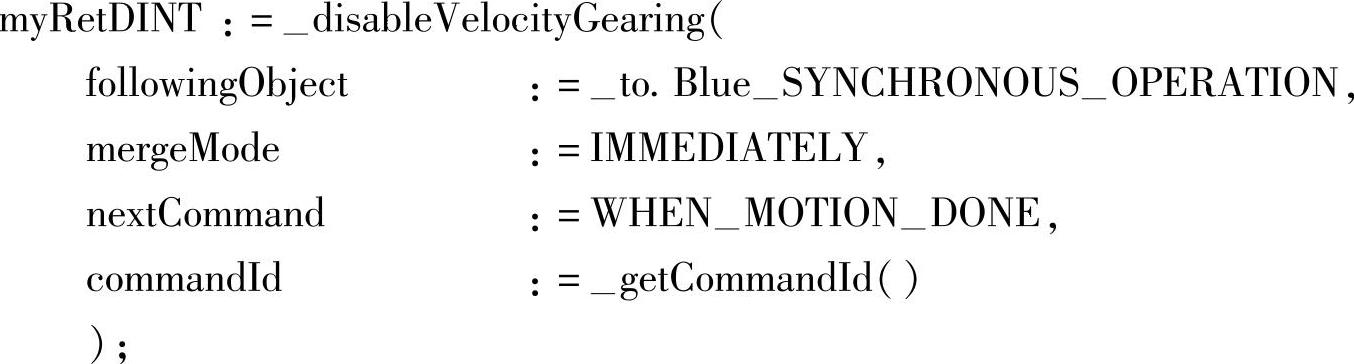
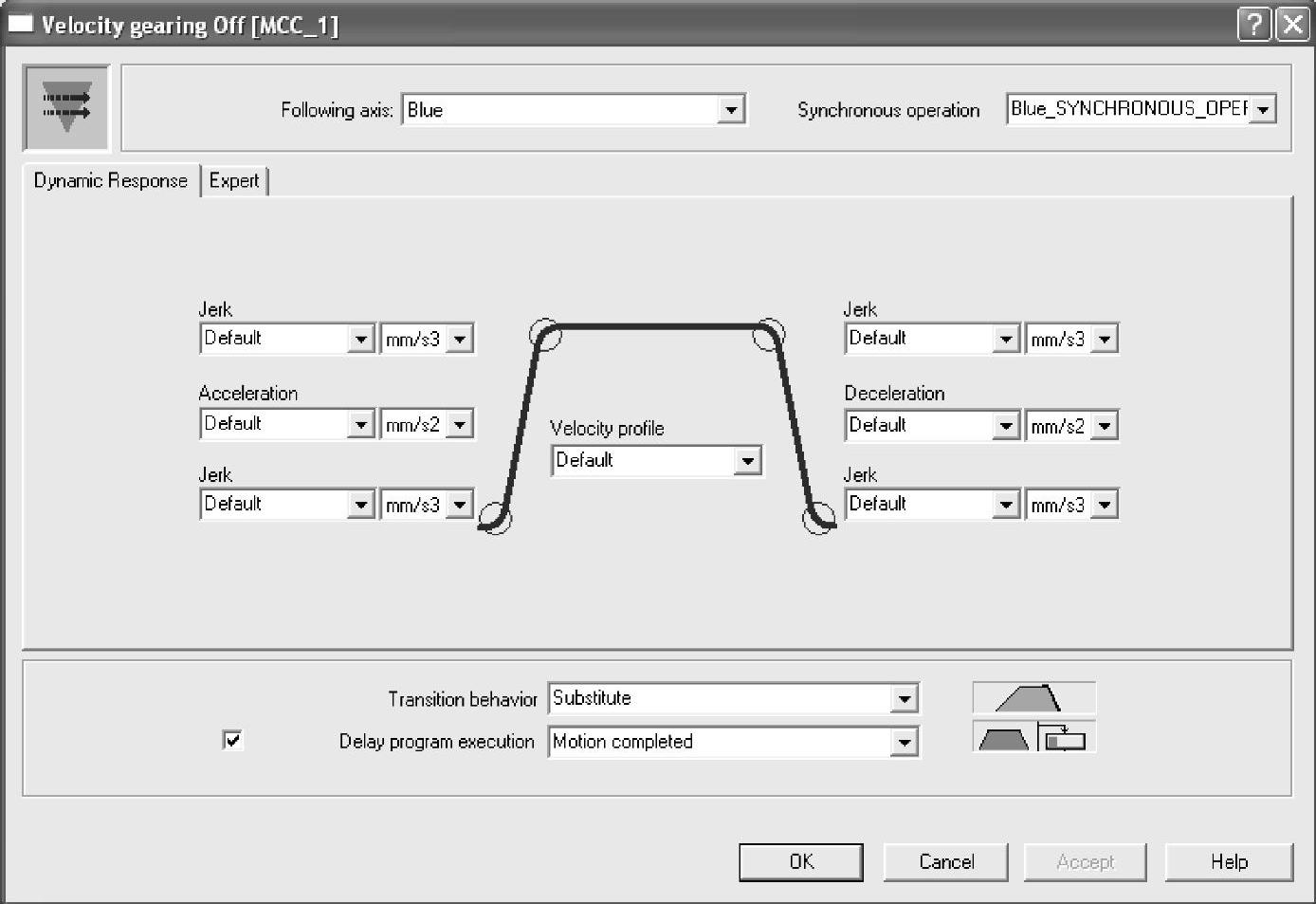
图6-23 Velocity Gearing Off编程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。