



电子齿轮功能(Gearing)可以完成主值与从轴间位置的线性传递功能。与机械中的齿轮功能类似,指定的齿轮比用于描述主值与从轴间的线性位置关系,如图6-2所示。
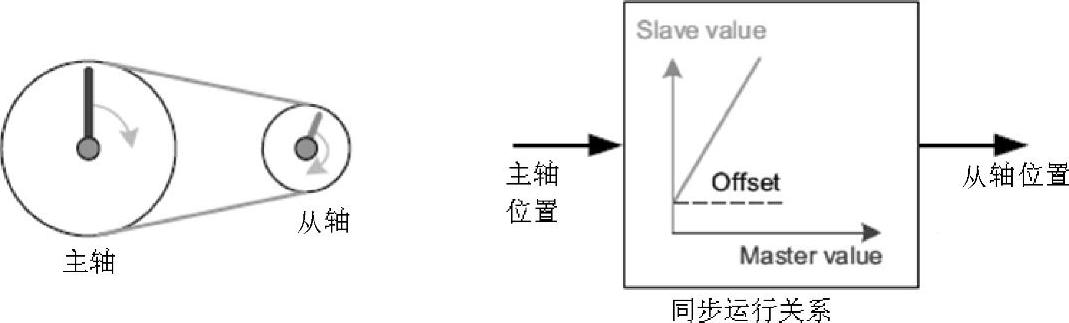
图6-2 电子齿轮同步
其主值和从轴按以下的公式进行计算:
Slave value=Gear ratio×Master value+Offset
使用电子齿轮时,会用到以下参数:
(1)齿轮比
齿轮比用于指定主值与从轴间的位置比例,齿轮比可以用分数或浮点数表示,如图6-3所示。

图6-3 齿轮比
(2)偏移
在SIMOTION中,从轴和主值间可以设置一个偏移量Offset,也可以在同步运动过程中对偏移量进行调整。比如在建立同步时,可以将同步命令_enableGearing()的参数“同步模式”设置为
1)IMMEDIATELY_AND_SLAVE_POSITION:立即开始同步,从轴带偏移;
2)ON_MASTER_AND_SLAVE_POSITION:同步位置参考主轴位置,从轴带偏移来激活从轴的偏移。(https://www.xing528.com)
(3)绝对同步与相对同步
同步类型分为绝对同步和相对同步,在SIMOTION建立同步前要指定其同步类型。绝对同步即主值和从轴的位置关系是绝对位置关系,即双方的位置关系是以坐标零点作为参考的,如图6-4所示。
相对同步则是主值和从轴都以当前位置值作为参考点,之后保持位置的线性关系,如图6-5所示。
(4)位置同步与速度同步
顾名思义,位置同步指从轴与主值的位置保持线性关系,编程时使用命令库中的_en-ableGearing()/_disableGearing()命令;速度同步指从轴与主值的速度保持线性关系,由于没有位置的概念,所以编程时比较简单,只需要指定齿轮比和同步方向即可,编程时使用命令库中的_enableVelocityGearing()/_disableVelocityGearing()命令。
(5)同步方向
在SIMOTION中,齿轮同步的方向有以下几种选择:
1)SYSTEM_DEFINED:按最短路径进行同步,从轴在同步运行过程中不反向;
2)SAME_DIRECTION:保持从轴的方向,如果从轴静止则为正向同步;
3)POSITIVE_DIRECTION:从轴的运动方向始终保持正向;
4)NEGATIVE_DIRECTION:从轴的运动方向始终保持负向;
5)SHORTEST_WAY:按最短路径进行同步,从轴在同步运行过程中可能会产生反向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。