



运行到固定停止点(Travel to Fixed Endstop)是用轴夹紧物体时所需的功能,使用该功能需要设定一个夹紧转矩,当夹具运行过程中碰到物体并且电动机转矩到达夹紧转矩时,会维持夹紧状态,并返回一个状态值,以便进行下一步工序。Travel to Fixed Endstop功能的使用需要两个条件,一个是位置轴处于运行中,另一个是电动机转矩到达设定的限幅值。
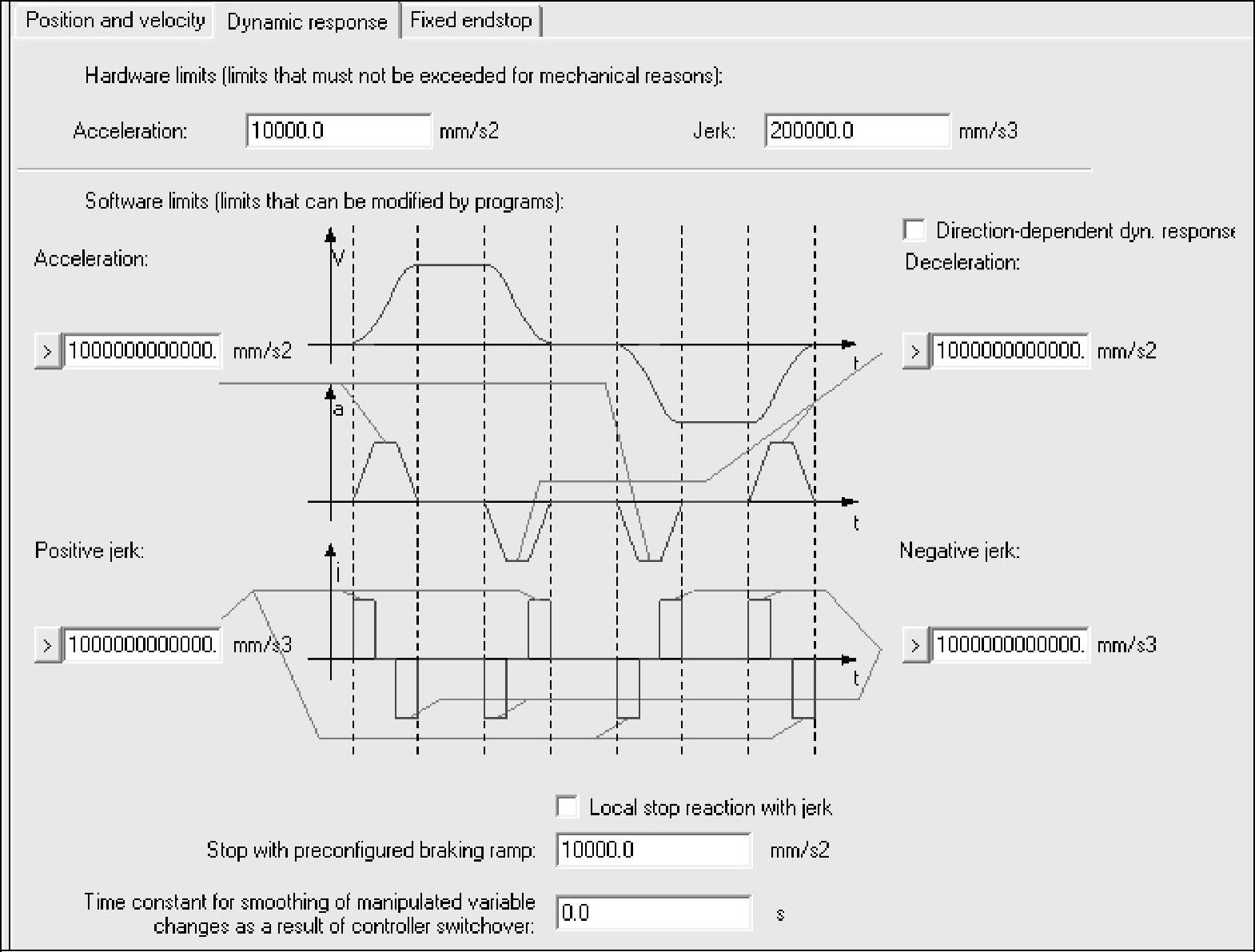
图5-6 设置轴的限定最大加速度和加加速
Travel to fixed endstop命令可以与轴的运动命令同时激活,此时用于一般运动中的跟随误差监视被关闭。该功能需要使用驱动器的转矩限幅功能,也就是说该功能只有选择了报文103、104、105或106时才能使用。
当固定停止点到达的条件满足时,插补器停止工作,但位置控制器保持激活。轴此时按照命令中设定的转矩值夹紧。轴系统变量moveToEndStopCommand.ClampingState指示固定点到达的状态。在夹紧状态下,只有反方向运行的运动命令才会执行。在夹紧状态下,当轴的实际位置偏离超过“Position tolerance after fixed endstop detection”规定的范围时(例如通过停止夹紧,与夹紧方向反向的运动命令),该状态取消。
在Fixed endstop设置标签中Fixed end stop detection(见图5-7)可以有下面两个选择来判断固定停止点是否到达:(https://www.xing528.com)
1)Via following error:表示通过跟随误差来判断固定停止点是否到达,在Following error for the fixed endstop detection域中输入跟踪误差值。
2)Via force/torque:表示通过力/转矩来判断固定停止点是否到达,在程序中设定力/转矩值。
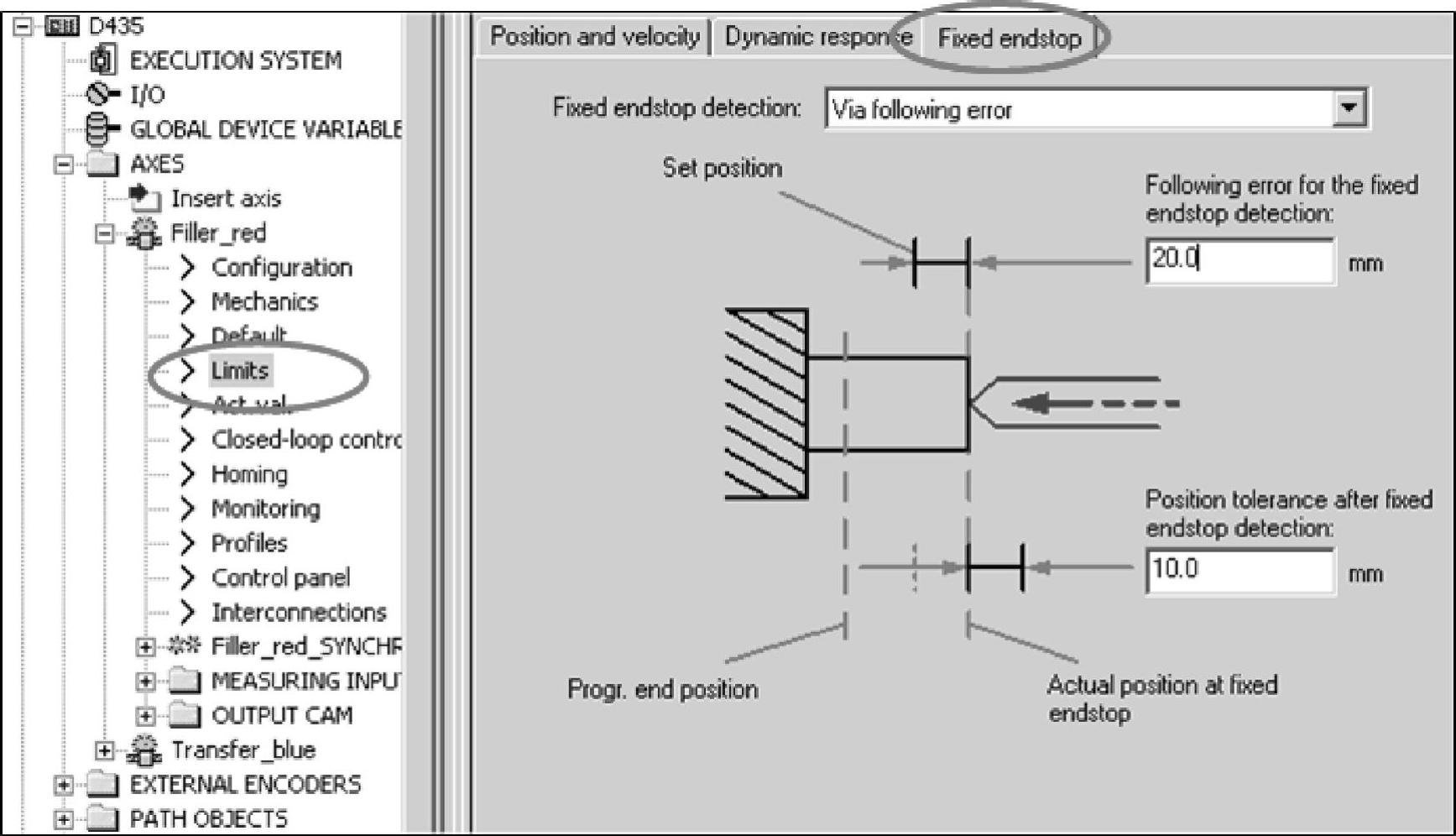
图5-7 固定停止点的设置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。