



在编码器方向和电动机旋转方向全部正常后,可以进行电动机模型参数的静态识别和速度控制器参数的动态优化。SINAMICS驱动器可优化的电动机包括普通感应电机和同步伺服电动机,无论是对西门子电机还是对第三方电动机都可达到最优的控制特性。
1.静态识别和动态优化简介
严格意义上讲,电动机在生产制造过程中,即使是订货号完全相同,也很难将所有参数和性能做得完全相同,而矢量控制的算法又非常依赖电动机模型,模型数据越准确,控制准确度就越高,控制性能就越好。所以,要想获得最优的控制性能,就需要对每一台电动机的模型数据全部进行在线识别,以获得更为准确的电动机模型。
SINAMICS S120的SERVO控制模式下,其控制结构框架中包括速度滤波器、速度控制器、电流环滤波器、电流控制器等环节。其中速度控制器是一个PI控制器,它的参数设置与控制的性能关系最为密切,一组最优的PI参数,能得到速度控制的最优性能。另外,在一些负载机械结构比较复杂的场合,如果存在高频振动现象,可以使用带有带阻滤波器的电流环滤波器,消除设定值通道中造成系统振动的频段,保证系统平稳运行。
SINAMICS驱动器提供了电动机模型参数识别和控制器参数优化的方法,通过参数和工具的设置可以方便快捷地完成。相关的参数有p340、p1910和p1960等,优化工具(在SERVO模式下)有自动控制器设置(Automatic Controller Setting)工具,下面分别进行介绍。
(1)电动机数据计算p340
p340是基于电动机铭牌数据的计算(定/转子阻抗感抗等)。
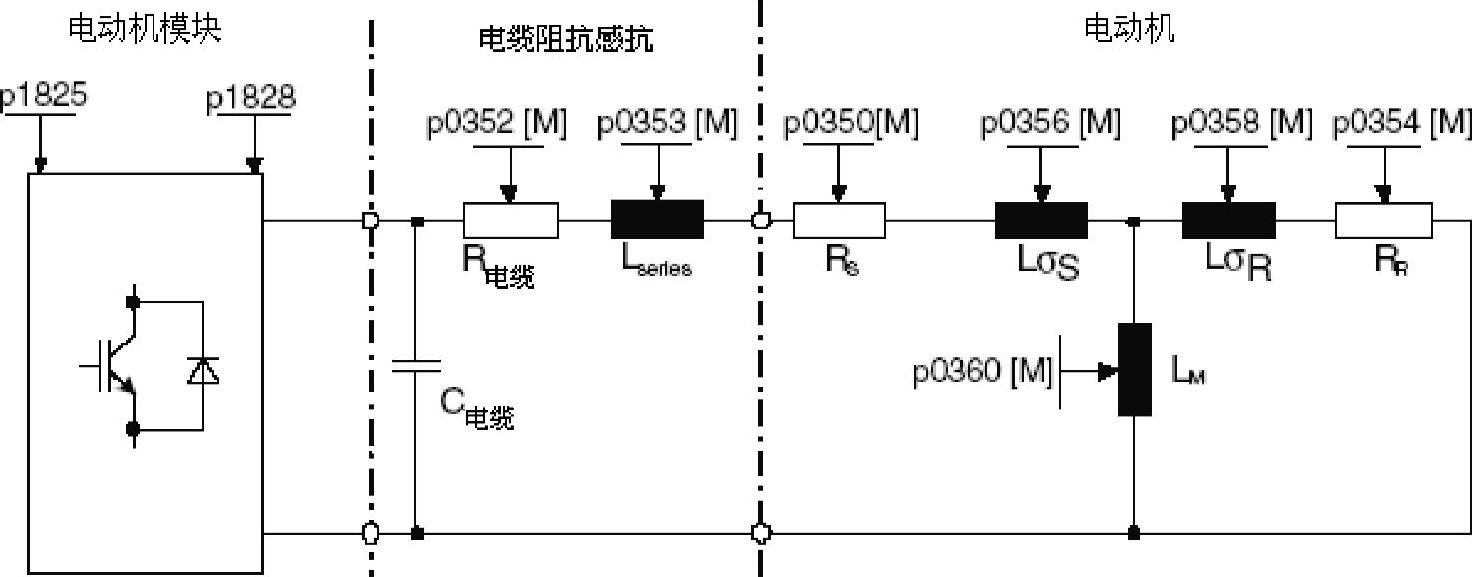
图2-9 异步电动机等效电路图
(2)采用p1910进行电动机数据识别(静态测量)
p1910用于电动机数据静态辨识,对于异步电动机(其等效电路图见图2-9)该过程将计算以下参数:
1)定子冷态阻抗p350;
2)转子冷态阻抗p354;
3)定子漏感p356;
4)转子漏感p358;
5)主电感p360。
对于同步电动机(其等效电路见图2-10)将计算:p0350电动机定子冷态电阻与p0352电缆电阻、p0356电动机定子漏电感、p0353电动机串联电感等参数。
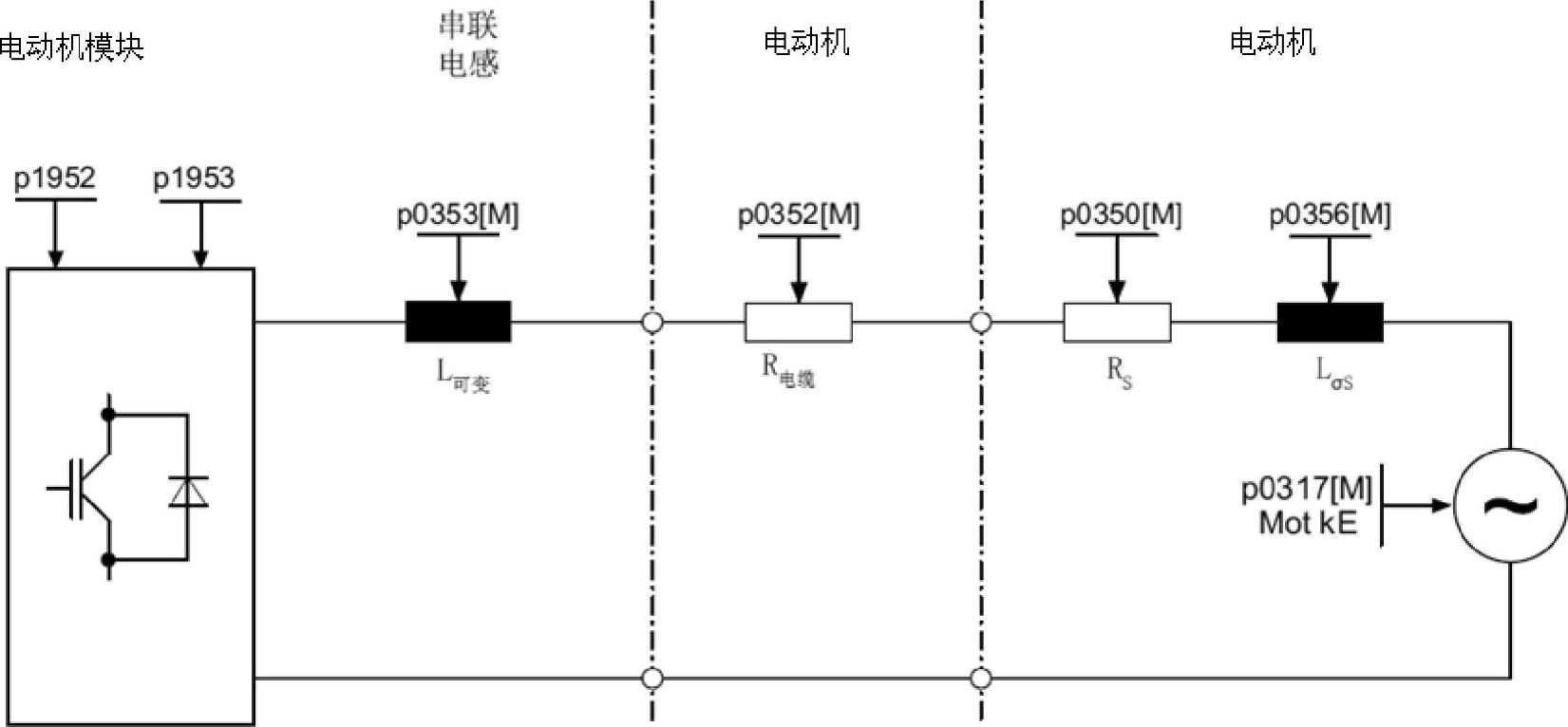
图2-10 同步电动机等效电路图
(3)采用p1960进行旋转测量
对于SERVO控制模式,p1960用于电动机数据动态识别,辨识过程将完成以下的工作:
1)转动惯量测量;
2)计算各种感抗;
3)电动机转矩常数测量;
4)计算电动机励磁电流与磁化感抗;
5)识别转换角与旋转方向。
(4)自动控制器设置工具(Automatic Controller Setting)
自动控制器设置工具是S120 SERVO控制模式特有的一个动态优化控制器参数的工具,通过自动优化功能可以自动进行正反向机械负载测量,自动设置电流环和速度环参数等。
2.静态识别和动态优化步骤
在S120 SERVO控制模式下,进行电动机识别与控制器优化时,一般可以依次进行p340、p1910、p1960,最后进行自动控制器设置。
优化的具体步骤如下:
1)完成驱动器的配置。通过向导完成项目配置并在过程中依照电动机铭牌正确输入电动机额定数据及编码器类型,检查编码器方向和电动机旋转方向。
2)执行电动机数据计算p340。设置p340参数值为1,该过程不必使能变频器。计算完成后p340自动恢复为0。
3)电动机数据静态辨识p1910。进行静态识别前,要求电动机处于冷态、抱闸没有闭合,并具有有效措施确保机械系统无危险。此时设置p1910参数值为1,然后使能驱动器(可以通过控制面板使能驱动器)。辨识结束后p1910自动恢复为0,驱动器会自动去使能。在电动机辨识过程中,变频器有输出电压,输出电流,电动机可能转动最大210°。
4)电动机数据及控制数据动态辨识和优化p1960。在进行旋转测量p1960=1时,电动机会以加速度时间p1958达到最大转速p1082,在进行伺服电动机优化时,可以根据实际情况降低最大转速p1082,并延长加减速斜坡时间p1958,以确保安全。动态辨识可以分空载和带载两种情况做两遍,以确定所带负载的转动惯量。识别的步骤如下:
①电动机空载测量。识别电动机动态数据(如电动机的转动惯量等),首先限制最大转速p1082,延长加减速时间p1958,然后设定p1960=1,激活动态辨识。
②使能驱动器,这可以通过控制面板进行。
③变频器自动执行动态优化过程,电动机旋转,优化结束后p1960自动恢复为0。
④电动机带载测量。带载后系统总的转动惯量等发生变化,需根据负载及机械设备的实际情况延长加减速时间p1958,降低最高转速p1082,然后执行p1960=1、p1959=4,再次激活动态辨识,优化过程中电流及速度限幅有效。
⑤使能驱动器。
⑥驱动器自动执行动态优化过程,电动机旋转,优化结束后p1960自动恢复为0,完成后根据两次测量获得的结果p1969,进行修改p342参数。
⑦设定p1960=3,进行电动机带载优化
⑧使能ON/OFF1并保持该位为“1”。
⑨变频器自动执行动态优化过程,电动机旋转,优化结束后p1960自动恢复为0,完成全部自动优化过程。
动态优化完成后需执行“Copy RAM to ROM...”的操作,将项目保存至CF卡,这样掉电后数据可保持。
需要注意:在电动机辨识过程中,电动机会加速至最大转速,优化过程中只有最大电流p640和最大转速p1082有效。若机械系统没有条件执行电动机空载优化,可直接进行带载优化,此时必须考虑机械条件的限制(如机械负载惯性、机械强度、运动速度、位移的限制等)。在前三种有限制的情况下,可适当调整p1958、p640、p1082,通过使用斜坡上升/下降时间、速度限制、电流限制来减少机械承受的压力做辅助保护,如机械位置有限制则考虑不做动态优化,或可通过p1959.14和p1959.15做限位。
5)自动控制器设置
在SCOUT软件中,在其左侧导航栏中找到驱动器,双击其中的“Commissioning”→“Automatic Controller Setting”可以打开自动控制器设置工具,如图2-11所示。
接下来,可以按以下步骤,完成自动控制器的设置。(https://www.xing528.com)
1)单击“Assume control priority!”获取控制权,进行自动优化,如图2-12所示。
2)单击“Accept”按钮,进行监控时间的确认,如图2-13所示。
3)单击工具栏上的 按钮进行自动优化,随后单击执行所有步骤按钮
按钮进行自动优化,随后单击执行所有步骤按钮 开始测量,在弹出的警告窗口中单击“Yes”按钮,如图2-14所示。
开始测量,在弹出的警告窗口中单击“Yes”按钮,如图2-14所示。

图2-11 自动控制器设置工具
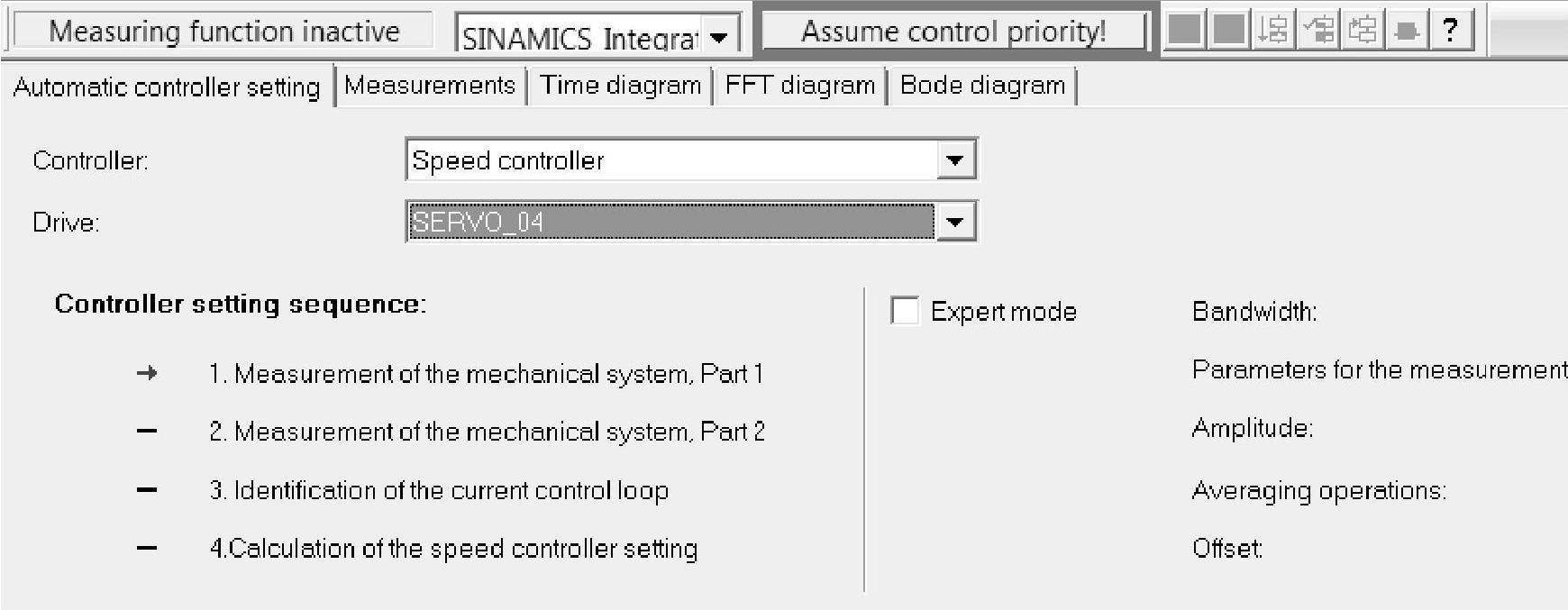
图2-12 获取控制权
4)测量结束后,得到优化后的速度环及电流环参数与当前值对比,如图2-15所示。单击右下角的“Accept Values”按钮接受计算结果。系统会自动提示在放弃控制权后要“Copy RAM to ROM”和“Upload to PG”。
系统在自动优化完成后,可以满足一般伺服控制场合的动态要求,如果需要进一步优化系统,可以手动修改速度控制器参数p1460与p1462,并通过伯德图来判断优化特性。
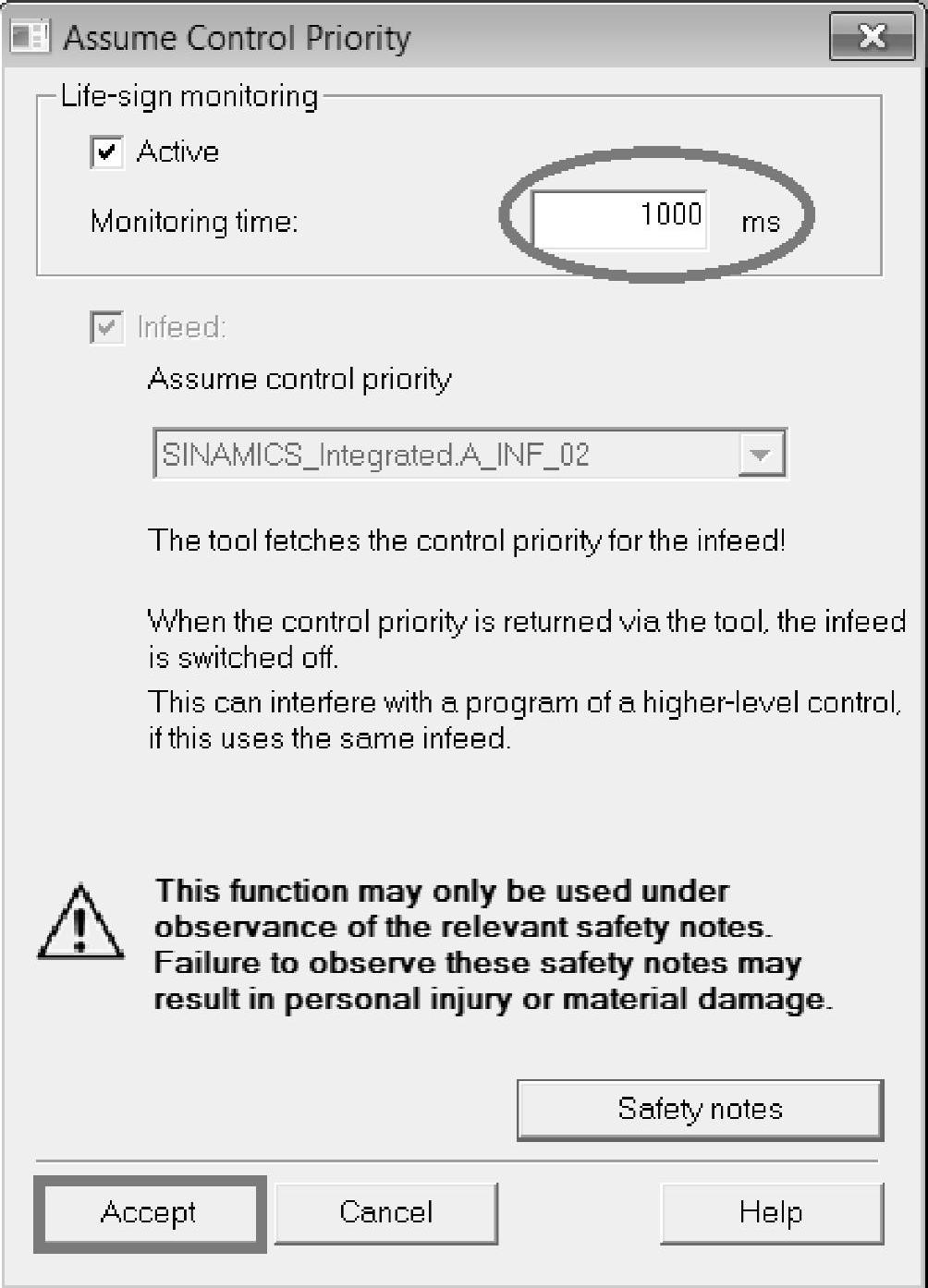
图2-13 确认监控时间
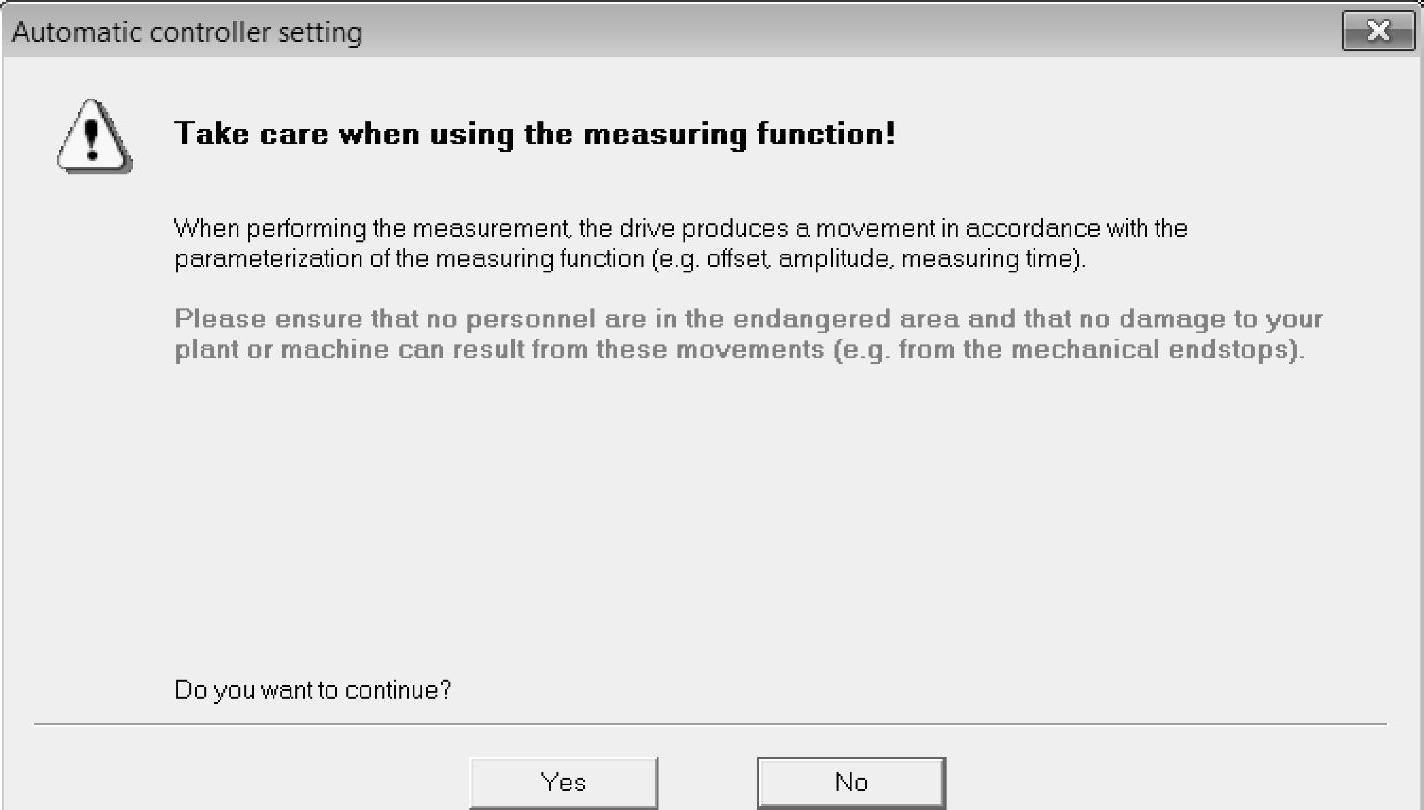
图2-14 安全提示

图2-15 接受优化结果
3.速度环优化后的校验
SIMOTION SCOUT软件提供了Trace工具,可以记录一组随时间变化的信号曲线,它是一个非常方便且实用的诊断调试工具。另外,在SERVO控制模式下,还提供了一个测量功能(Measuring function),可以获得控制系统的伯德图(Bode Diagram),以便于在频域对控制器性能进行判断,下面对两种工具进行简单介绍。
(1)Trace工具的使用
使用Trace工具可以对驱动器以及电动机的各种状态参数进行记录,方便故障诊断以及性能判断。在SCOUT软件中,可在其左侧导航栏中找到驱动器,用鼠标双击其中的“Com-missioning”→“Trace”,即可打开Trace工具,如图2-16所示。
使用Trace工具的步骤如下:
1)选择要Trace的驱动器;
2)选择要Trace的信号参数;
3)设置Trace记录数据的采样时间;
4)设置Trace总时间长度(或者无限Trace);
5)选择Trace的触发条件;
6)开始Trace。
Trace工具停止后,在其Time diagram选项卡下可以看到实际的运行曲线,如图2-17所示。通过此曲线可以判断系统的动态特性,如超调、稳定时间等。也可以在触发条件里选择位触发或者是故障触发,这样可以记录事件发生时各种状态的变化过程。
如果需要手动调整速度环的比例增益及积分,可用鼠标双击项目导航栏中的“Speed controller”,在右侧的窗口中可以改变比例增益系数“P gain”和积分时间“Reset time”,从而得到不同的电动机动态特性,如图2-18所示。
(2)测量功能的使用
测量功能可以用来测量速度环或者电流环的伯德图,从而判断系统的动态响应能力。在系统调试过程中才会用到此功能,利用测量功能时需要注意,在测量过程中电动机会微微旋转。在SCOUT工具中,在左侧导航栏中找到驱动器,用鼠标双击其中的“Commissioning”→“Measuring Function”可以打开测量功能,如图2-19所示。
其具体使用的步骤如下:
1)可以通过工具栏图标,打开测量功能;
2)选择驱动器;
3)选择测量点回路,图2-19中选择了速度环设定点,即测量速度闭环的频响特性;
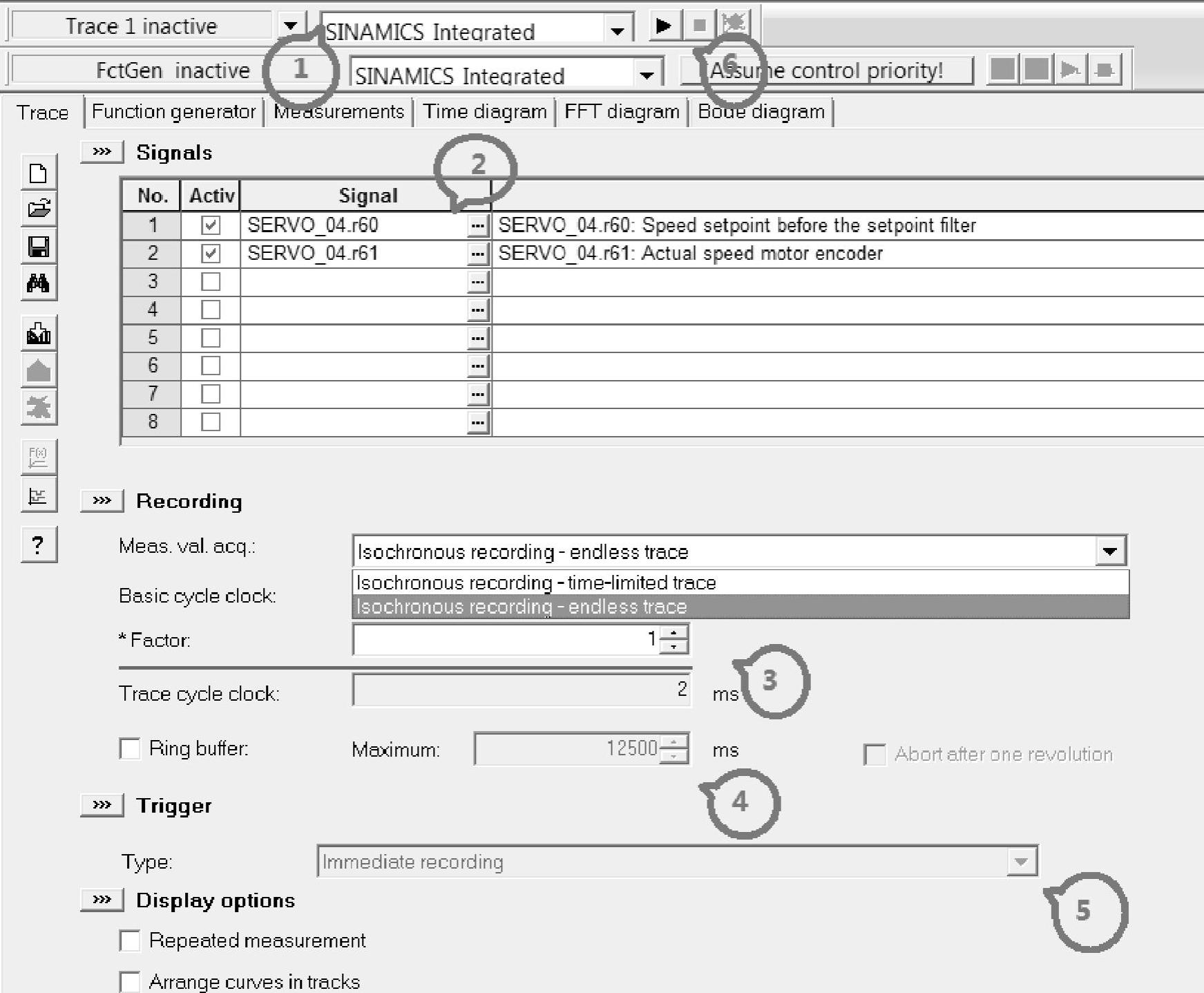
图2-16 Trace工具
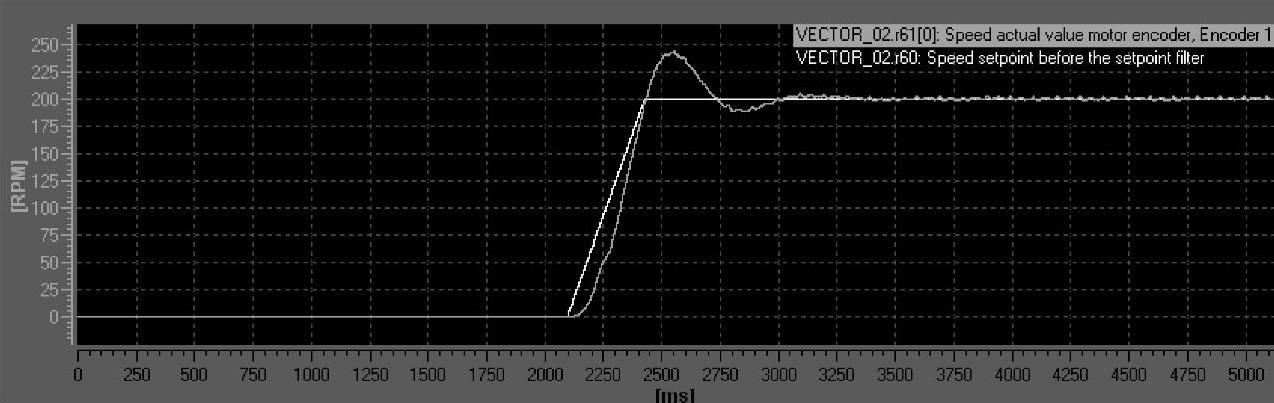
图2-17 Trace曲线图

图2-18 修改速度控制器的比例增益及积分时间
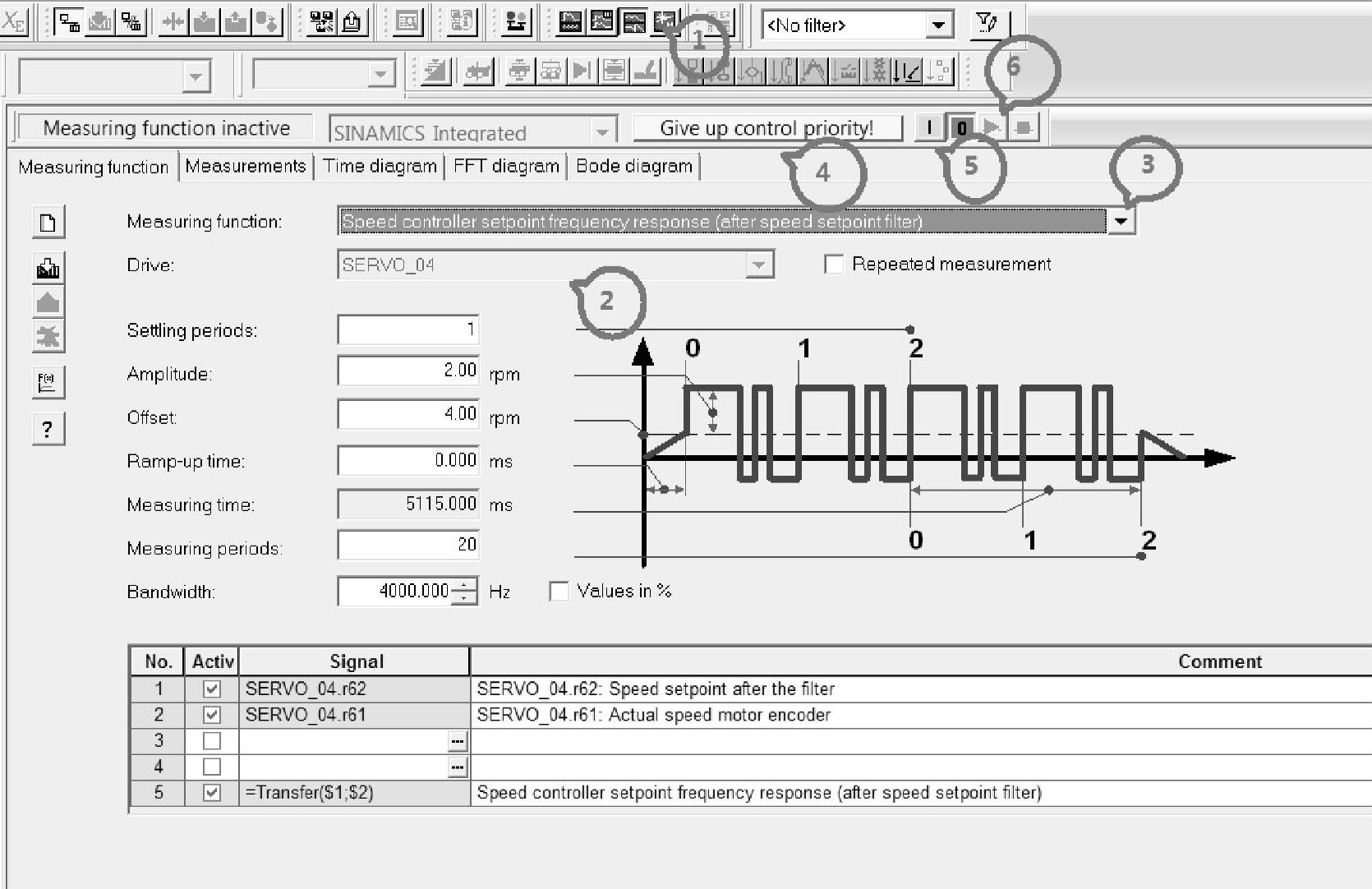
图2-19 测量功能
4)获取控制权限;
5)使能轴;
6)开始测量。
测量结束后,系统会弹出Bode diagram窗口,显示系统速度闭环的伯德图,如图2-20所示。通过伯德图可以判断速度环在整个频域范围内的特性,如带宽、高频谐振等。对于造成系统发散的频率点,可以通过电流环滤波器滤掉。
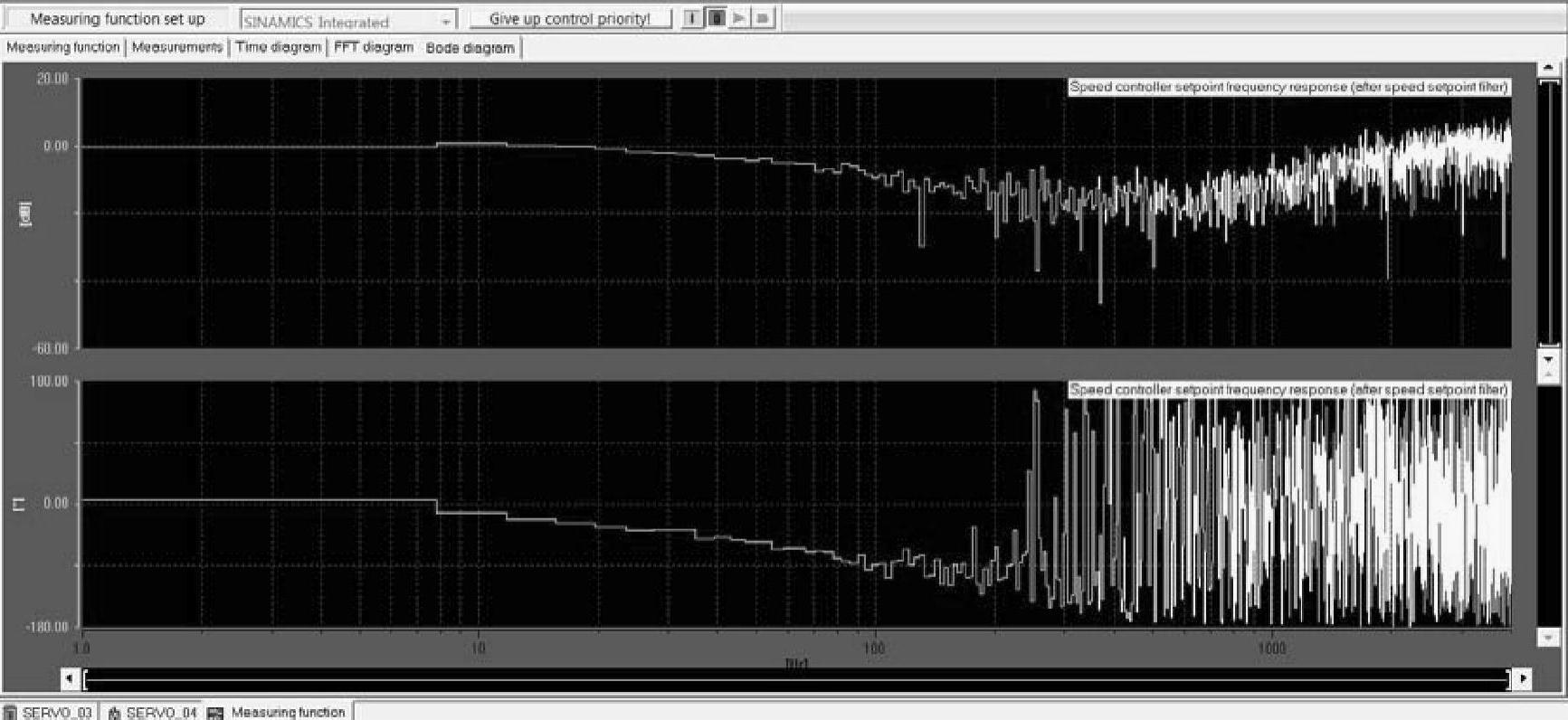
图2-20 Bode图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。