



1.功能
1)选择近路方向;
2)计算当前与目标位置的步数;
3)计算目标位置的前一位置步数。
刀塔在旋转时,现在位置与目标位置实时比较(每个PMC扫描周期都能够进行比较,从而保证了实际换刀中,每转一个刀位都能进行实时比较),并随时输出计算结果(现在位置—目标位置),输出结果存放在“计算结果输出地址中(一般是R地址)”。并判断刀塔正转或反转,正转时W1=0,反转时W1=1,应用工程师可以采用这个信号进行刀库运转控制。
2.符号
如图3-36所示。
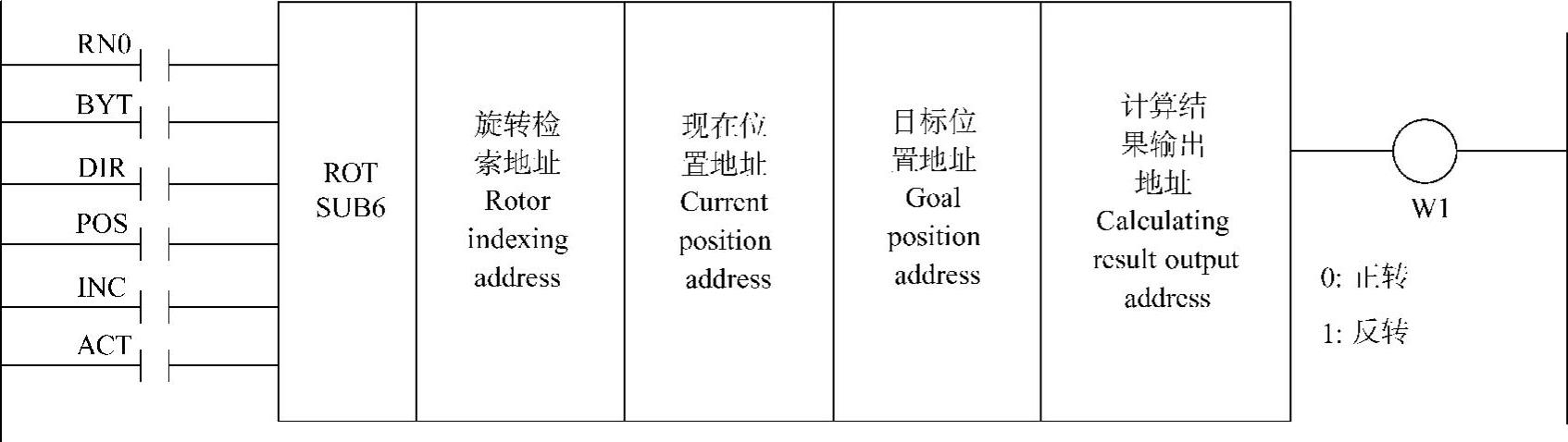
图3-36 功能指令ROT格式
3.用法
1)旋转检索地址:一般可指刀库容量。可直接用数字给出刀库容量值,也可将刀库容量值存在R、C、D地址中。
2)当前位置地址:存放刀具(在刀库)现在位置的地址。
3)目标位置地址:存放希望达到的目标位置(T代码指定的刀号)的地址。
4)计算结果输出:目标位置到当前位置的步数,用R地址存放结果输出数据。
5)根据计算结果输出自动输出W1=0(刀塔正转)或W1=1(刀塔反转)。(https://www.xing528.com)
4.参数设定
RN0指定转台的起始位置:RN0=0时转台位置从0开始计数,RN0=1时转台位置从1开始计数。
BYT指定要处理数据的位数:BYT=0时被处理数据为2位BCD码,BYT=1时被处理数据为4位BCD码。
DIR指定是否以短路径原则选择旋转方向:DIR=0时不选择短路径,旋转方向始终为正向,DIR=1时选择短路径方向为旋转方向。
POS指定操作条件:POS=0时计数目标位置,POS=1时计数目标位置前一位置。
INC指定位置数或步数:INC=0时计数位置数,INC=1时计数步数。
如果要计算目标位置的前一位置,设定INC=0、POS=1;如果要计算当前位置与目标位置之间的差距,设定INC=1、POS=0。
ACT指令执行触发信号:ACT=0时不执行ROT指令,ACT=1时执行ROT指令。
W1输出条件:由W1的不同状态使回转体正转或反转。即W1=0(处于复位状态)时输出(刀塔)正转指令,W1=1时输出(刀塔)反转指令。
例如:数控车床转塔具有12个刀位,刀具号从1开始计数,编写程序控制转塔以短路径原则旋转。
转塔旋转控制信号包括:R0000.1:常1信号;R0000.0:常0信号;Y0000.4:Y0000.4=1时,转塔电动机正转;Y0000.5:Y0000.5=1时,转塔电动机反转;X0001.0:转塔电动机过热检测传感器信号;R0100:当前刀具号存储器地址;R0102:目标刀具号存储区地址;R0121.6:刀塔旋转信号,R0121.6=1时刀塔正转,R0121.6=0时刀塔反转,如图3-37所示。
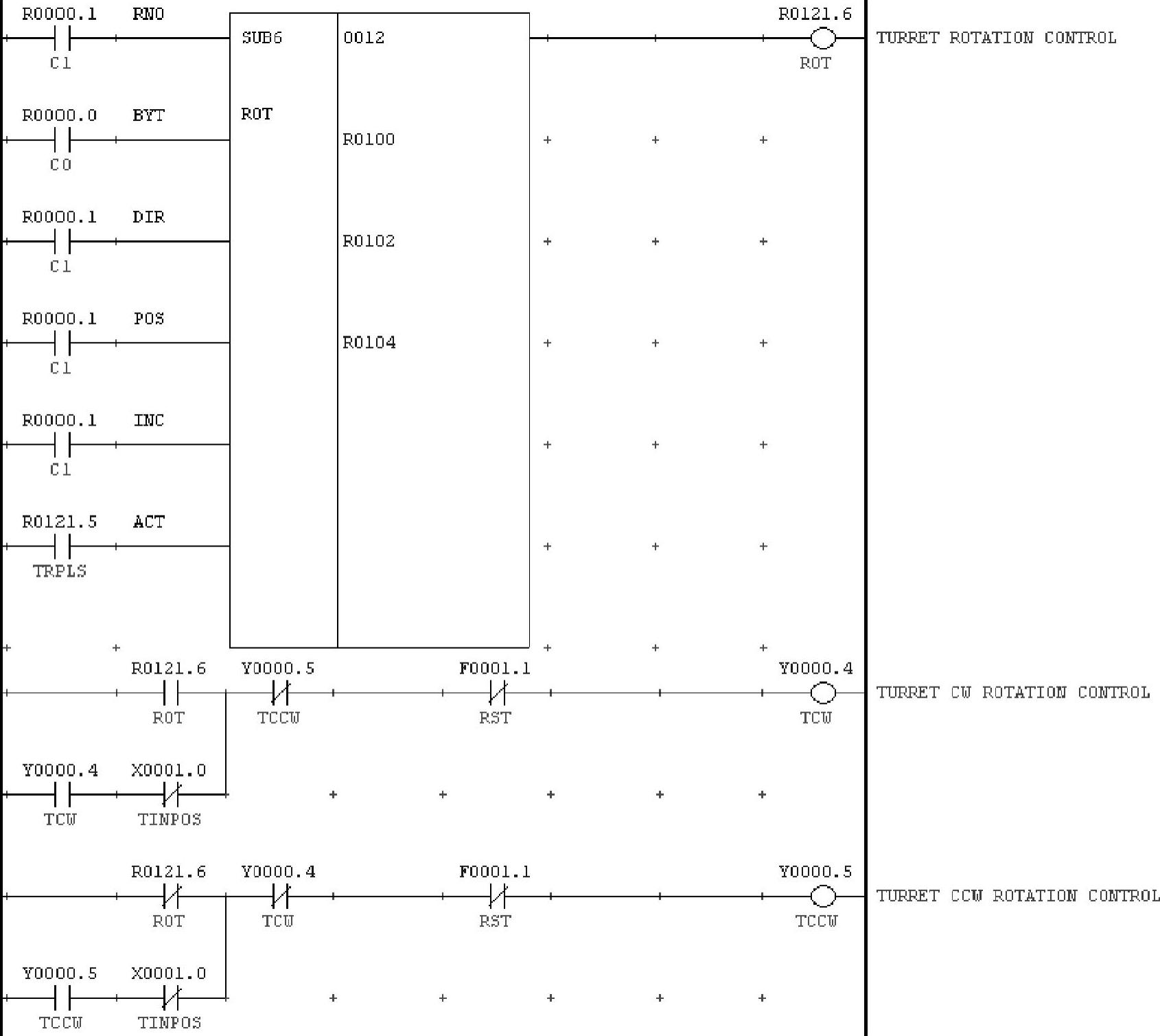
图3-37 功能指令ROT程序实例
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。