



【例6-14】史密斯预估补偿法仿真分析仪。
史密斯预估补偿法仿真分析仪程序如shixz06_14所示。前面板和程序框图面板分别如图6-7-2和图6-7-3所示。
(1)前面板赋值及被控对象离散化模型
参见图6-7-3。用户在前面板上设置不超过5阶且不含延迟的连续被控对象。在“设定参数”控件簇内设置采样周期T,延迟时间tao和仿真拍数nk。在“积分系数”控件中设置积分系数Ki。离散化程序段如下:

实例运行后被控对象连续模型(g0)

被控对象离散模型(gz1zp)

(2)常规PID调节器D(z)设计程序段
详见程序shixz06_12,不同之处在于由用户在前面板上设定积分常数Ki、程序计算比例系数Kp和微分系数Kd,只需两个相关方程。常规PID调节器(Dzzp)

显然,调节器Dzzp的两个零点抵消了被控对象构造gz1zp的两个极点。前已述及,积分常数Ki的数值对控制性能影响很大,仿真时应当从较小的数值逐渐调大。

图6-7-2 程序shixz06_14前面板图
(3)构造史密斯预估调节器式(6-7-3)的程序段(https://www.xing528.com)
注意程序中n0和n01的作用。运行得

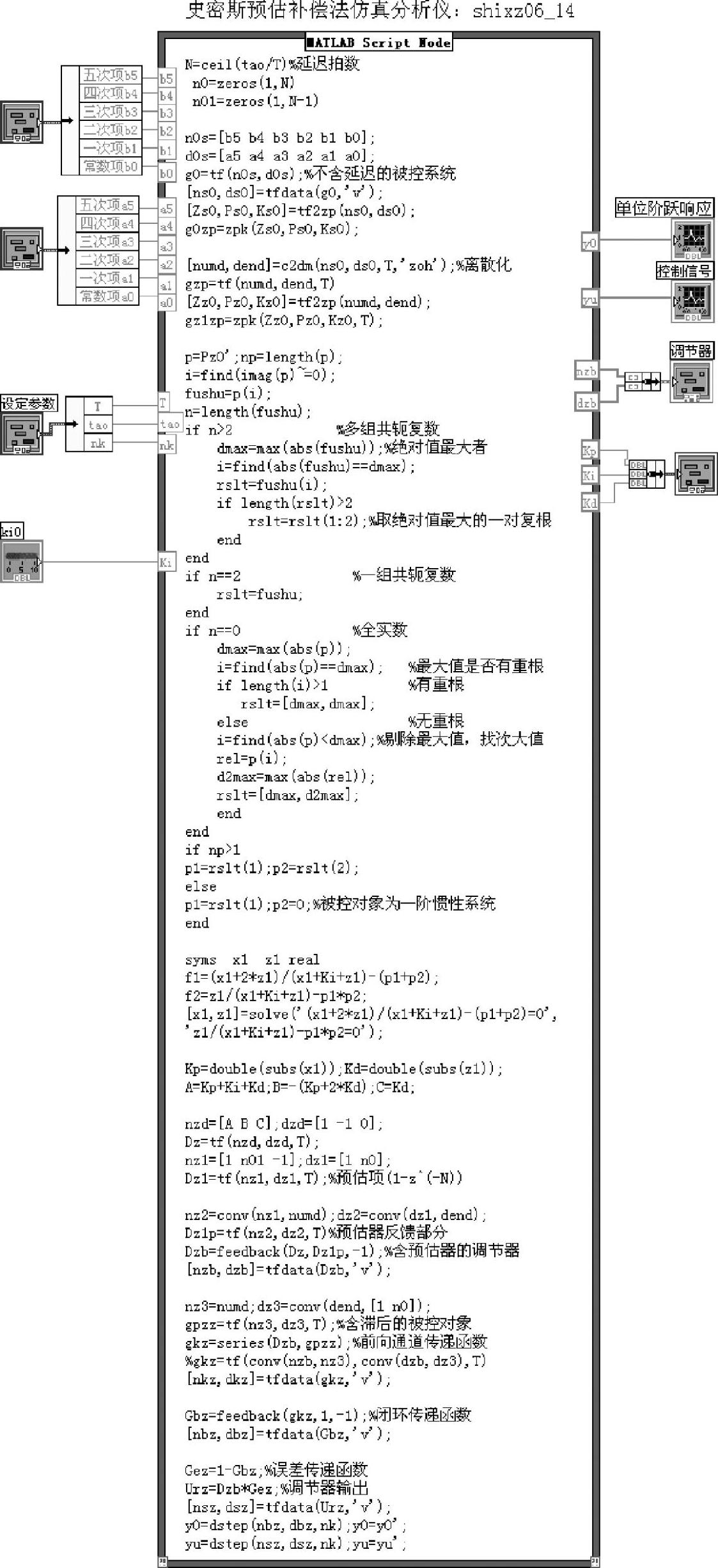
图6-7-3 程序shixz06_14框图面板
含预估器的调节器(Dzb)数据示于前面板左下角的簇中,非最简约形式。
(4)研究图6-7-2两个示波器的曲线可以发现,系统的输出响应从第3拍开始,控制信号从第0拍开始,系统响应有延迟,调节器输出由于预估器的存在而补偿了这种延迟。
(5)积分系数对系统控制性能的强烈影响
将被控对象改变为

当其余参数保持不变时,控制系统不稳定,单位阶跃响应如图6-7-4a所示。在仿真仪连续运行模式下,不断减小积分系数Ki,系统将逐渐离开不稳定状态,当Ki=0.35时,系统单位阶跃响应如图6-7-4b所示。对比可知,积分系数Ki在PID调节器中的重要作用。
顺便提及,史密斯预估补偿法对系统参数变化的适应能力较强,读者可在仿真仪上进行研究。

图6-7-4 积分系数Ki对调节器控制性能的影响
程序shixz06-14a示出了使用阶梯波显示曲线的史密斯预估器算法,可供参考。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。